当前位置:网站首页>红外相机:巨哥红外MAG32产品介绍
红外相机:巨哥红外MAG32产品介绍
2022-07-06 18:23:00 【月照银海似蛟龙】
巨哥电子公司介绍

MAG32 介绍
MAG32是17um非制冷焦平面工业级热像仪。具有如下优点:
- MAG32在线式热像仪采用进口384*288非制冷胶平面探测器,输出优质的红外图像
- 兼容海康威视、大华等常见NVR,可通过NVR播放视频、控制云台和对焦
- 提供纯温度码流、纯视频码流、混合码流三种模式,适应不同用途和网络条件
- 可录制温度数据流并回放,完美重现历史场景,可输出超分辨率图像
- 支持多用户同时采集温度和视频数据
- 用户可切换镜头获得不同测温范围或视场角,并准确测温
- 提供专业版应用程序、SDK、图像离线分析软件
- 接口丰富,易于集成
接口
MAG32接口丰富,易于集成,其接口如下所示: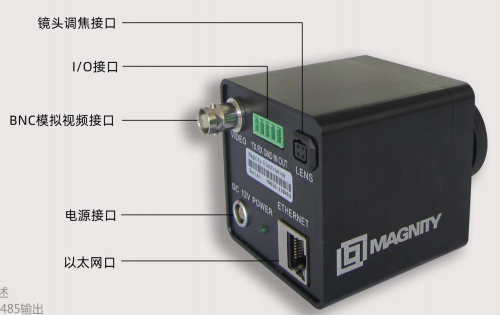
具有5种接口
- 镜头调焦接口
- I/O接口
- BNC模拟视频接口
- 电源接口
- 以太网口
I/O口定义如下图: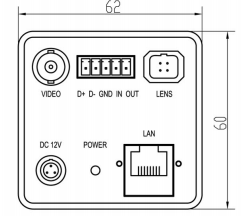
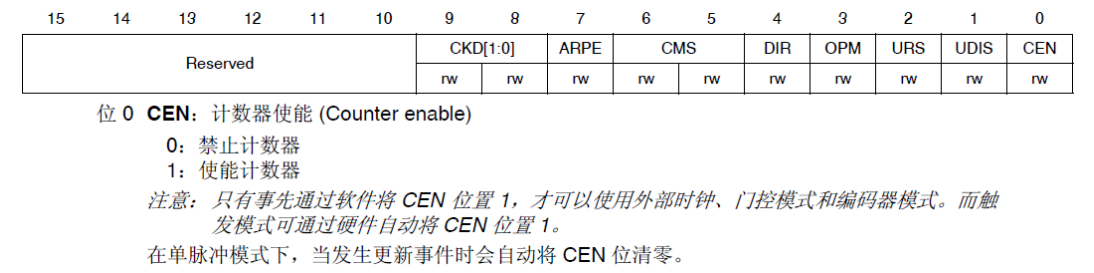
其中,
D+,D- 为 RS485输出
GND 为 电源地
OUT 为 输出触发信号,该信号应符合3.3v LVTTL电平规范
IN 为 输入触发信号,该信号应符合3.3v LVTTL电平规范 下降沿触发
技术参数
探测器
| 探测器类型 | 非制冷焦平面 |
|---|---|
| 波长范围 | 7.5~14 um |
| 像素数 | 384x288 |
| 像素尺寸 | 17pm |
| 帧率 | 50Hz |
测温性能和图像性能
| 调焦方式 | 自动/手动,电动镜头支持自动对焦,实时显示图像锐度以辅助人工对焦 |
|---|---|
| 清晰成像范围 | 0.3m~8,部分型号镜头近端距离略大 |
| 发射率和背景温度校正 | 根据输入发射率和背景温度自动校正,发射率0.11-1可调 |
| 滤光片或窗口透过率校正 | 根据输入透过率自动校正 |
| 大气透过率校正 | 根据气象参数自动计算大气透过率井校正温度 |
| 鼠标测温 | 实时显示光标点温度 |
| 测温模式 | 实时可移动点、线测温,区域测温,最高温跟踪,平均温度测量 |
| 高低温报警 | 控制端声光报警,并记录日志,触发报警时可自动储存温度数据和图像快照。 电平指示 |
| 辅助温度分析 | 相对温度分析、温度直方图分析,历史温度曲线图,线上温度曲线图 |
| 显示增强 | 自动拉伸,DDE细节增强,图像亮度对比度可调,支持手动平台拉伸 |
| 调色板 | 白热、黑热、铁红、彩虹等10种 |
| 电子倍焦 | 2X、4X、全屏显示 |
数据存储
| 报告生成 | WORD格式,带内容选择向导 |
|---|---|
| 测温对象 | 测温对象配置可存储到文件,可从文件读取。每个对象的代表性温度 |
| (例如最高温度)数据可保存到文件 | |
| 温度数据保存 | 自定义MGT格式可用离线分析软件处理,CSV格式可用EXCEL查看 |
| 温度数据流保存 | 自定义MGS格式,可限制最大尺寸 |
| 温度数据流回放 | 回放带时间戳,可调节播放速度、冻结、循环播放,播放时可进行图像处理, 图像 |
| 红外图像保存 | BMPsgJPG格式,可选带标记信息或不带标记信息 |
| 视频保存 | MPEG压缩,可选是否带用户标记信息,可限制最大尺寸 |
| 运行日志 | 自动记录,自动保存 |
网络连接
| 数据接口 | 100M以太网,支持RTP、RTCP, RTSP、ONVIF、FTP、TCP、UDP、IP、DHCP、APP等 |
|---|---|
| IP分配 | 动态IP和静态IP,控制端集成DHCP Server |
| 组网方式 | 热像仪和电脑直接连;通过局域网连接;热像仪在局域网内组播或广博等 |
| 心跳机制 | 支持 |
环境参数
| 工作温度 | -30~60°C |
|---|---|
| 储存温度 | - 40~80°C |
| 湿度 | <85% (非冷凝) |
| 外壳防护等级 | IP54 |
| 冲击 | 25G, IEC68-2-29 |
| 振动 | 2G, IEC68-2-6 |
| 电磁兼容 | 符合CE/FCC标准 |
电气接口
| 温度数据 | 100M太网,RJ45接口 |
|---|---|
| 模拟视频 | NTSC/PAL,带测温区域显示,BNC接口 |
| 串口 | RS485,选配RS232,可控制云台 |
| I/O | 输入FFC触发、抓图触发、检测触发等,输出报警指示 |
| 调焦马达驱动 | 支持 |
| 电源 | 电源适配器输入AC100-240V,输出DC12V/1.25A,使用带自锁航空插头 |
| 功耗 | 2.2W |
物理属性
| 尺寸 | 65.5mm(L)X62mm(W)X60mm(H) |
|---|---|
| 重量 | 280g (不含镜头) |
镜头配置
MAG32有多种镜头可选

边栏推荐
- mongodb查看表是否导入成功
- 字符串的相关编程题
- Modify the system time of Px4 flight control
- ROS学习(26)动态参数配置
- Set up [redis in centos7.x]
- The difference between Tansig and logsig. Why does BP like to use Tansig
- Appium基础 — Appium Inspector定位工具(一)
- Scenario practice: quickly build wordpress blog system based on function calculation
- AcWing 904. Wormhole solution (SPFA for negative rings)
- AcWing 346. 走廊泼水节 题解(推公式、最小生成树)
猜你喜欢
ROS学习(26)动态参数配置
![Yiwen takes you into [memory leak]](/img/a8/bd1a57ef3bde8910eff2a5f68296df.png)
Yiwen takes you into [memory leak]
Gin introduction practice
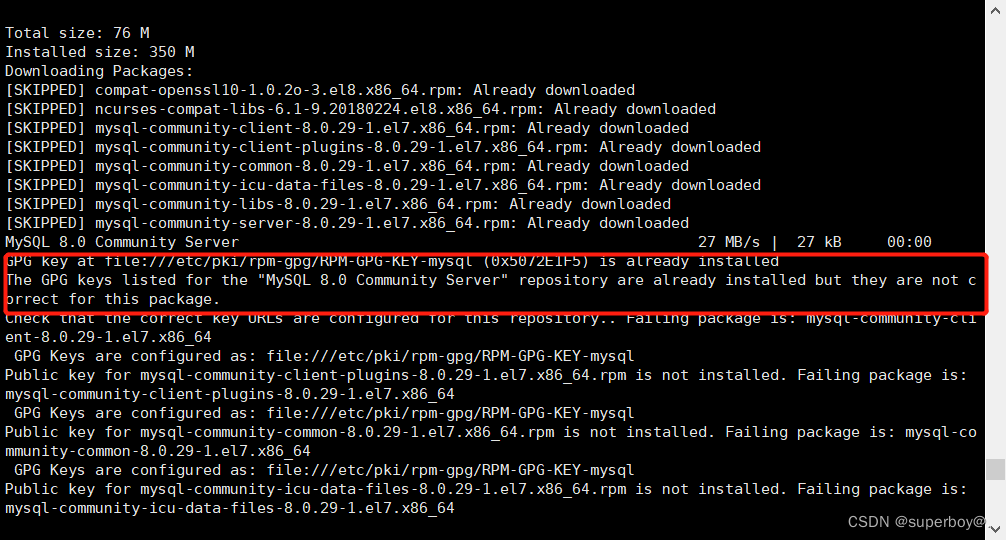
centos8安裝mysql報錯:The GPG keys listed for the “MySQL 8.0 Community Server“ repository are already ins
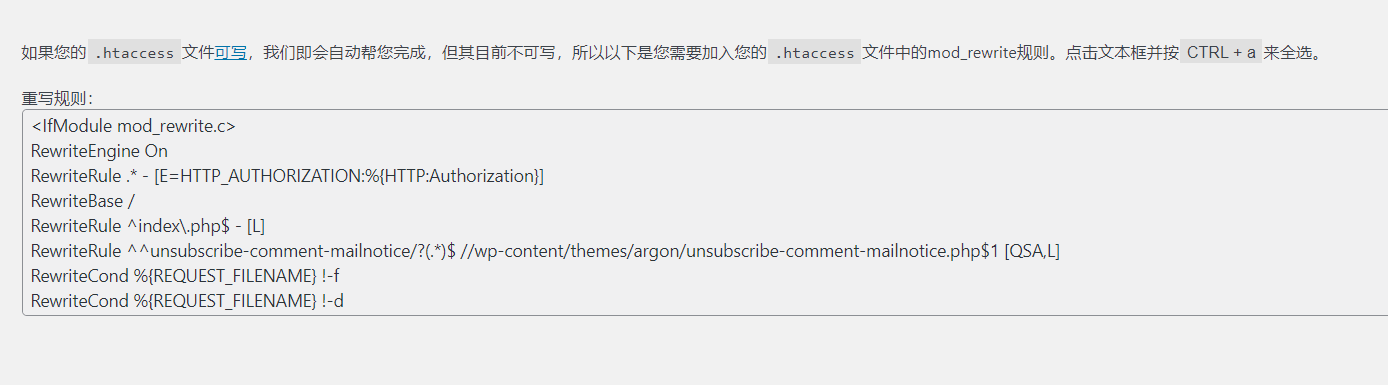
Set WordPress pseudo static connection (no pagoda)
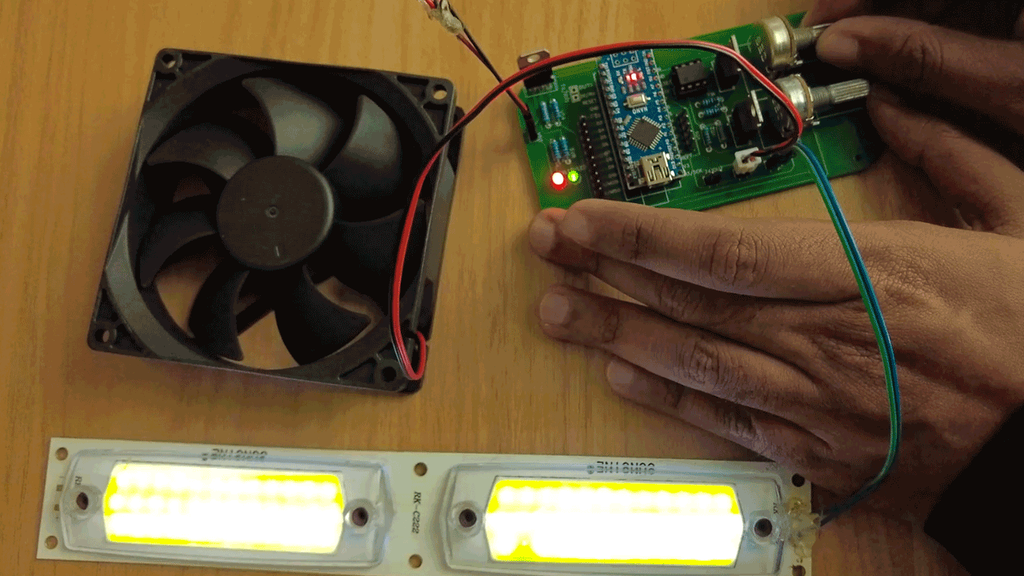
Make DIY welding smoke extractor with lighting
ROS learning (21) robot slam function package -- installation and testing of orbslam
PartyDAO如何在1年内把一篇推文变成了2亿美金的产品DAO

新工作感悟~辞旧迎新~
Livox激光雷达硬件时间同步---PPS方法
随机推荐
Correct use of BigDecimal
@Before, @after, @around, @afterreturning execution sequence
Flir Blackfly S USB3 工业相机:白平衡设置方法
ROS学习(24)plugin插件
The use of video in the wiper component causes full screen dislocation
454-百度面经1
C语言【23道】经典面试题【下】
BigDecimal 的正确使用方式
Baidu flying general BMN timing action positioning framework | data preparation and training guide (Part 2)
开发中对集合里面的数据根据属性进行合并数量时犯的错误
Centos8 install MySQL 8.0 using yum x
The foreground downloads network pictures without background processing
Gin introduction practice
ROS学习(25)rviz plugin插件
ROS学习(二十)机器人SLAM功能包——rgbdslam的安装与测试
Shell script quickly counts the number of lines of project code
一文带你走进【内存泄漏】
【唯一】的“万字配图“ | 讲透【链式存储结构】是什么?
ZOJ Problem Set – 2563 Long Dominoes 【如压力dp】
ROS learning (26) dynamic parameter configuration