当前位置:网站首页>Livox激光雷达硬件时间同步---PPS方法
Livox激光雷达硬件时间同步---PPS方法
2022-07-06 18:23:00 【月照银海似蛟龙】
Livox激光雷达硬件时间同步---PPS方法
在这篇博客中介绍了Livox的时间硬件同步的3种方法,其中有一种方法是通过PPS信号的方式,信号时间同步。本篇通过STM32 TIM3定时器的更新中断,产生符合要求的PPS信号。
Livox对PPS信号的要求
Livox对PPS信号的要求如下图: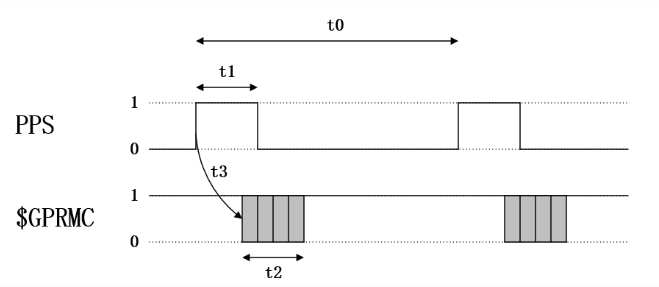
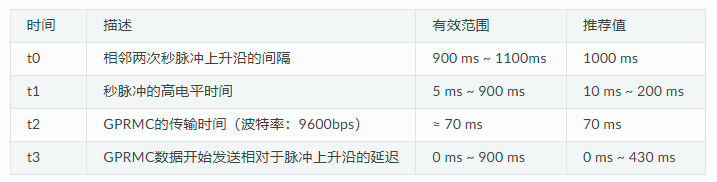
其中GPRMC的要求可以不用管,得到两个有用的信息:
- 相邻两次秒脉冲上升沿的间隔时间 有效范围 900-1100ms 推荐值,1000ms
- 秒脉冲的高电平时间 有效范围 5ms-900ms 推荐值 10ms-200ms
下面我们用STM32F4 产品一个满足要求的PPS信号
STM32F4 的定时器功能十分强大,有TIME1 和 TIME8 等高级定时器,也有 TIME2-TIME5,TIM9-TIM14 等通用定时器,还有 TIME6 和 TIME7 等基本定时器,总共达 14 个定时器之多。
STM32F4 定时器分类(共14个):
- 高级定时器:TIME1 、TIME8
- 通用定时器: TIME2-TIME5,TIM9-TIM14
- 基本定时器: TIME6 、 TIME7
STM32F4 通用定时器简介
STM32F4 的通用定时器包含一个 16 位或 32 位自动重载计数器(CNT),该计数器由可编程预分频器(PSC)驱动。
STM32F4 的通用定时器可以被用于:测量输入信号的脉冲长度(输入捕获)或者产生输出波形(输出比较和 PWM)等。
使用定时器预分频器和 RCC 时钟控制器预分频器,脉冲长度和波形周期可以在几个微秒到几个毫秒间调整。
STM32F4 的每个通用定时器都是完全独立的,没有互相共享的任何资源。
STM3 的通用 TIMx (TIM2-TIM5 和 TIM9-TIM14)定时器功能包括:
16 位/32 位(仅 TIM2 和 TIM5)向上、向下、向上/向下自动装载计数器(TIMx_CNT),注意:TIM9~TIM14 只支持向上(递增)计数方式。
16 位可编程(可以实时修改)预分频器(TIMx_PSC),计数器时钟频率的分频系数为 1~65535 之间的任意数值。
4 个独立通道(TIMx_CH14,TIM9TIM14 最多 2 个通道),这些通道可以用来作为:
A.输入捕获
B.输出比较
C.PWM 生成(边缘或中间对齐模式) ,注意:TIM9~TIM14 不支持中间对齐模式
D.单脉冲模式输出可使用外部信号(TIMx_ETR)控制定时器和定时器互连(可以用 1 个定时器控制另外一个定时器)的同步电路。
如下事件发生时产生中断/DMA(TIM9~TIM14 不支持 DMA):
A.更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发)
B.触发事件(计数器启动、停止、初始化或者由内部/外部触发计数)
C.输入捕获
D.输出比较
E.支持针对定位的增量(正交)编码器和霍尔传感器电路(TIM9~TIM14 不支持)
F.触发输入作为外部时钟或者按周期的电流管理(TIM9~TIM14 不支持)
STM32F4 通用定时器的寄存器
控制寄存器 1
控制寄存器 1(TIMx_CR1)
该寄存器的各位描述如图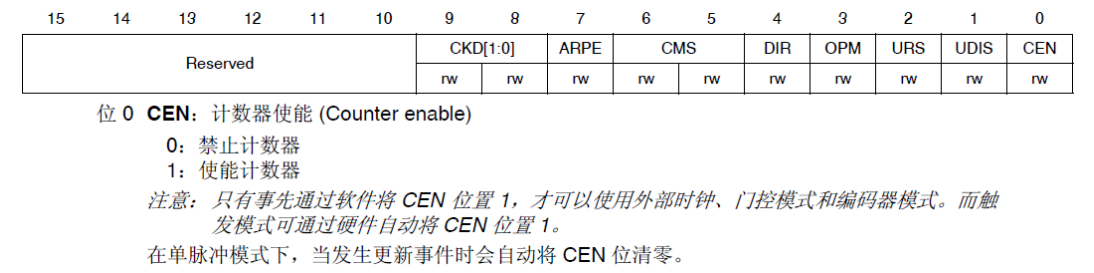
TIMx_CR1 的最低位,也就是计数器使能位,该位必须置 1,才能让定时器开始计数.
DMA/中断使能寄存器
DMA/中断使能寄存器(TIMx_DIER)
该寄存器是一个 16 位的寄存器,其各位描述如图: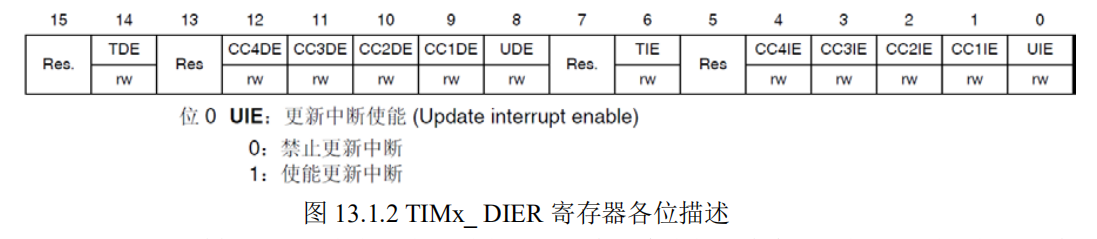
第 0 位,该位是更新中断允许位,用到定时器的更新中断,需要该位要设置为 1,来允许由于更新事件所产生的中断。
预分频寄存器
预分频寄存器(TIMx_PSC)。
该寄存器用设置对时钟进行分频,然后提供给计数器,作为计数器的时钟。该寄存器的各位描述如图
这里,定时器的时钟来源有 4 个:
1)内部时钟(CK_INT)
2)外部时钟模式 1:外部输入脚(TIx)
3)外部时钟模式 2:外部触发输入(ETR),仅适用于 TIM2、TIM3、TIM4
4)内部触发输入(ITRx):使用 A 定时器作为 B 定时器的预分频器(A 为 B 提供时钟)。
这些时钟,具体选择哪个可以通过 TIMx_SMCR 寄存器的相关位来设置。这里的 CK_INT时钟是从 APB1 倍频的来的,除非 APB1 的时钟分频数设置为 1(一般都不会是 1),否则通用定时器 TIMx 的时钟是 APB1 时钟的 2 倍,当 APB1 的时钟不分频的时候,通用定时器 TIMx的时钟就等于 APB1 的时钟。这里还要注意的就是高级定时器以及 TIM9~TIM11 的时钟不是来自 APB1,而是来自 APB2 的。
计数器寄存器
TIMx_CNT 寄存器,该寄存器是定时器的计数器,该寄存器存储了当前定时器的计数值。
自动重装载寄存器
自动重装载寄存器(TIMx_ARR)
该寄存器在物理上实际对应着 2 个寄存器。一个是程序员可以直接操作的,另外一个是程序员看不到的,这个看不到的寄存器叫做影子寄存器.事实上真正起作用的是影子寄存器。 据 TIMx_CR1 寄存器中 APRE 位的设置:APRE=0 时,预装载寄存器的内容可以随时传送到影
子寄存器,此时 2 者是连通的;而 APRE=1 时,在每一次更新事件(UEV)时,才把预装载寄存器(ARR)的内容传送到影子寄存器。
自动重装载寄存器的各位描述如图
状态寄存器
状态寄存器(TIMx_SR)
该寄存器用来标记当前与定时器相关的各种事件/中断是否发生。该寄存器的各位描述如图
通过库函数配置定时器
定时器相关的库函数主要集中在固件库文件 stm32f4xx_tim.h 和 stm32f4xx_tim.c 文件中。定时器配置步骤如下:
TIM3 时钟使能。
TIM3 是挂载在 APB1 之下,所以通过 APB1 总线下的时钟使能函数来使能 TIM3。调用的函数是:
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); ///使能 TIM3 时钟
初始化定时器参数,设置自动重装值,分频系数,计数方式等
在库函数中,定时器的初始化参数是通过初始化函数 TIM_TimeBaseInit 实现的:
voidTIM_TimeBaseInit(TIM_TypeDef*TIMx,
TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
第一个参数是确定是哪个定时器
第二个参数是定时器初始化参数结构体指针,结构体类型为 TIM_TimeBaseInitTypeDef,这个结构体的定义:
typedef struct
{
uint16_t TIM_Prescaler;
uint16_t TIM_CounterMode;
uint16_t TIM_Period;
uint16_t TIM_ClockDivision;
uint8_t TIM_RepetitionCounter;
} TIM_TimeBaseInitTypeDef;
这个结构体一共有 5 个成员变量,对于通用定时器只有前面四个参数有用,最后一个参数 TIM_RepetitionCounter 是高级定时器才有用的
第一个参数 TIM_Prescaler 是用来设置分频系数的
第二个参数 TIM_CounterMode 是用来设置计数方式,可以设置为向上计数,向下计数方式还有中央对齐计数方式,比较常用的是向上计数模式 TIM_CounterMode_Up 和向下计数模式 TIM_CounterMode_Down。
第三个参数是设置自动重载计数周期值
第四个参数是用来设置时钟分频因子
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = 5000;
TIM_TimeBaseStructure.TIM_Prescaler =7199;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
设置 TIM3_DIER 允许更新中断
要使用 TIM3 的更新中断,寄存器的相应位便可使能更新中断。在库函数里面定时器中断使能是通过 TIM_ITConfig 函数来实现的:
void TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState);
第一个参数是选择定时器号
第二个参数非常关键,是用来指明我们使能的定时器中断的类型,定时器中断的类型有很多种,包括更新中断 TIM_IT_Update,触发中断 TIM_IT_Trigger,以及输入捕获中断等等。
第三个参数就是失能还是使能。
使能 TIM3 的更新中断,格式为:
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE );
TIM3 中断优先级设置。
在定时器中断使能之后,因为要产生中断,必不可少的要设置 NVIC 相关寄存器,设置中断优先级
使能 TIM3
配置完后要开启定时器,通过 TIM3_CR1 的 CEN 位来设置。在固件库里面使能定时器的函数是通过 TIM_Cmd 函数来实现的:
void TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState)
使能定时器 3,方法为:
TIM_Cmd(TIM3, ENABLE); //使能 TIMx 外设
编写中断服务函数
在最后,还是要编写定时器中断服务函数,通过该函数来处理定时器产生的相关中断。
在中断产生后,通过状态寄存器的值来判断此次产生的中断属于什么类型。然后执行相关的操作
使用更新(溢出)中断,在状态寄存器 SR 的最低位。在处理完中断之后应该向 TIM3_SR 的最低位写 0,来清除该中断标志。
在固件库函数里面,用来读取中断状态寄存器的值判断中断类型的函数是:
ITStatus TIM_GetITStatus(TIM_TypeDef* TIMx, uint16_t TIM_IT)
该函数的作用是,判断定时器 TIMx 的中断类型 TIM_IT 是否发生中断。比如,我们要判断定
时器 3 是否发生更新(溢出)中断,方法为:
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET){
}
固件库中清除中断标志位的函数是:
void TIM_ClearITPendingBit(TIM_TypeDef* TIMx, uint16_t TIM_IT)
该函数的作用是,清除定时器 TIMx 的中断 TIM_IT 标志位。在TIM3 的溢出中断发生后,我们要清除中断标志位,方法是:
TIM_ClearITPendingBit(TIM3, TIM_IT_Update );
固件库还提供了两个函数用来判断定时器状态以及清除定时器状态标志位的函数 TIM_GetFlagStatus 和 TIM_ClearFlag,他们的作用和前面两个函数的作用类似。只是在 TIM_GetITStatus 函数中会先判断这种中断是否使能,使能了才去判断中断标志位,而TIM_GetFlagStatus 直接用来判断状态标志位。
Code
//通用定时器 3 中断初始化
//arr:自动重装值。 psc:时钟预分频数
//定时器溢出时间计算方法:Tout=((arr)*(psc))/Ft us.
//Ft=定时器工作频率,单位:Mhz
//这里使用的是定时器 3!
void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); //使能 TIM3 时钟
TIM_TimeBaseInitStructure.TIM_Period = arr-1; //自动重装载值
TIM_TimeBaseInitStructure.TIM_Prescaler=psc-1; //定时器分频
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);// 初始化定时器 TIM3
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE); //允许定时器 3 更新中断
NVIC_InitStructure.NVIC_IRQChannel=TIM3_IRQn; //定时器 3 中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0x01; //抢占优先级 1
NVIC_InitStructure.NVIC_IRQChannelSubPriority=0x03; //响应优先级 3
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);// 初始化 NVIC
TIM_Cmd(TIM3,ENABLE); //使能定时器 3
//定时器 3 中断服务函数
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update)==SET) //溢出中断
{
PPS_OUT=1;
delay_ms(100);
PPS_OUT=0;
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //清除中断标志位
}
包含一个中断服务函数和一个定时器 3 中断初始化函数
该函数的 2 个参数用来设置TIM3 的溢出时间。因为系统初始化 SystemInit 函数里面已经初始化 APB1 的时钟为 4 分频,所
以 APB1 的时钟为 42M,
当 APB1 的时钟分频数为 1 的时候,TIM2-7 以及 TIM12-14 的时钟为 APB1 的时钟,而如果 APB1 的时钟分频数不为 1,那么 TIM2-7 以及 TIM12-14 的时钟频率将为 APB1 时钟的两倍。因此,TIM3 的时钟为 84M,再根据设计的 arr 和 psc 的值,就可以计算中断时间了。
计算公式如下:
Tout= ((arr+1)*(psc+1))/Tclk;
其中:
Tclk:TIM3 的输入时钟频率(单位为 Mhz)。
Tout:TIM3 溢出时间(单位为 s)。
然后在中断函数中,判断发生中断后,拉高AF10,延时100ms再拉低。
Result
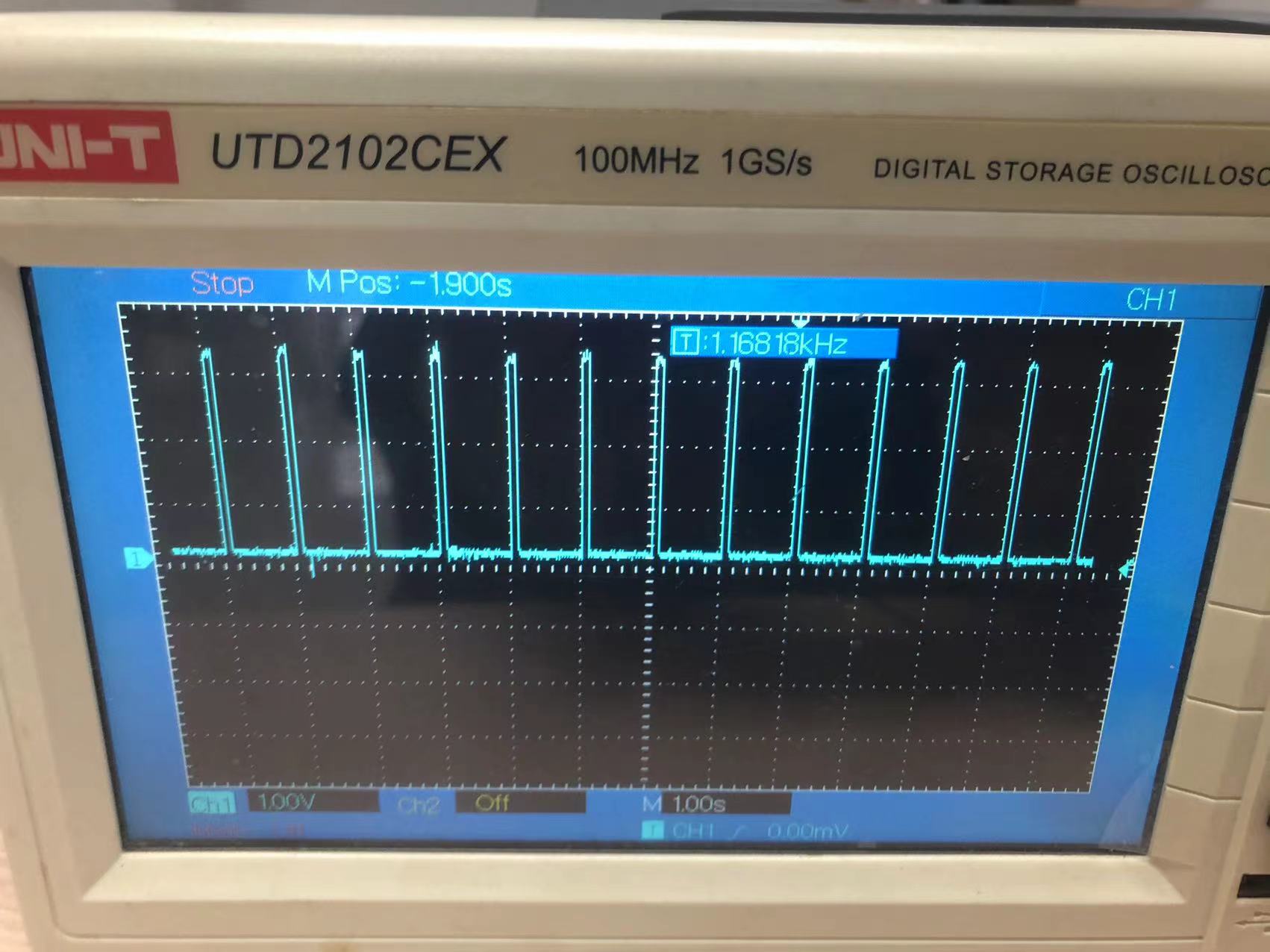
连续的信号,下面缩放横轴时间,来看具体的电平时间
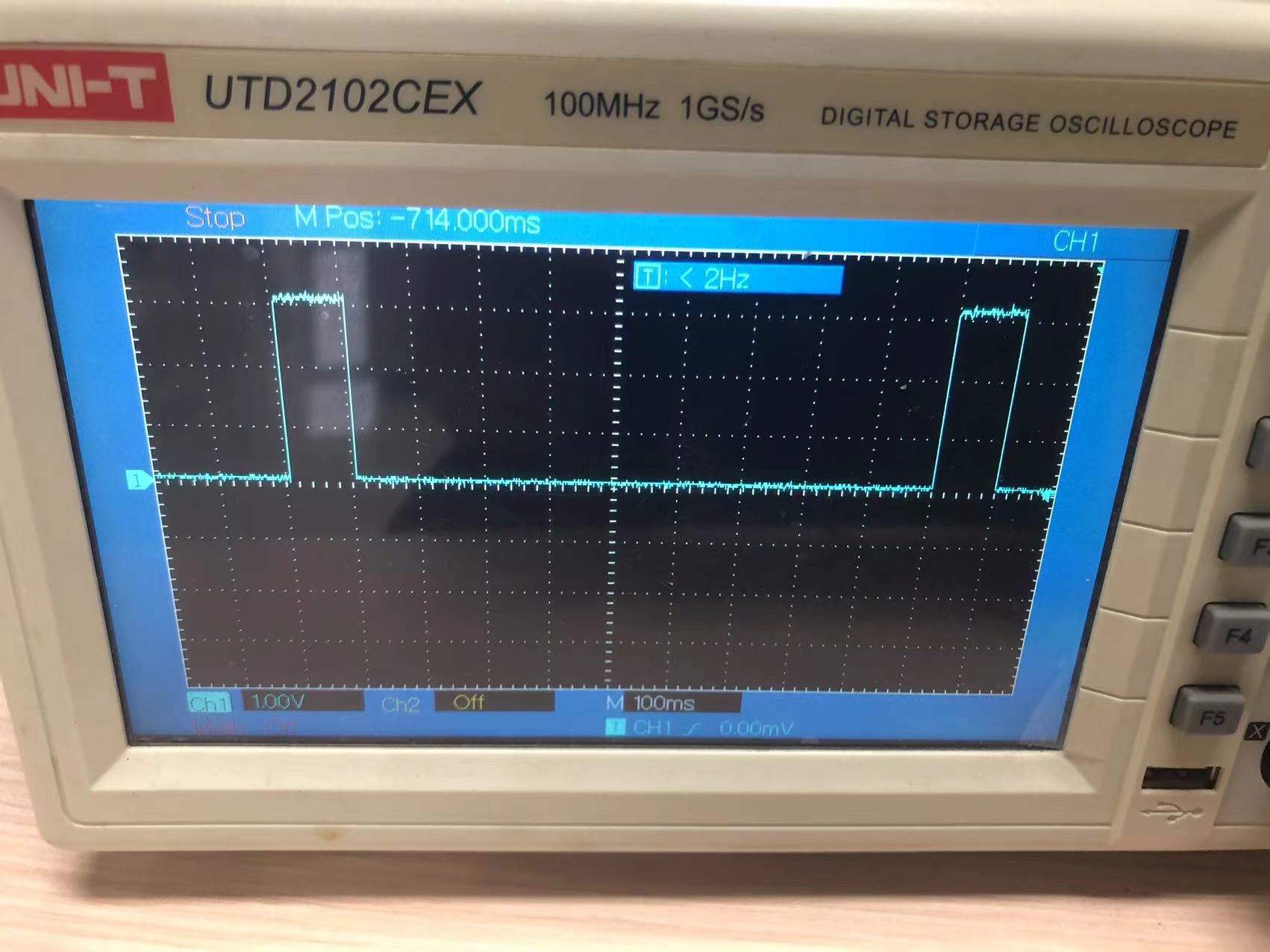
一横格为100ms,高电平持续时间大约为100ms,低电平为900ms,上升沿的相邻时间为1000±100ms。
放大高电平部分,大概10个格,一格为10ms,所以高电平在100ms±10ms内。
信号满足一开始说的要求。
边栏推荐
- AcWing 1142. Busy urban problem solving (minimum spanning tree)
- Let's see how to realize BP neural network in Matlab toolbox
- 2022 system integration project management engineer examination knowledge point: Mobile Internet
- 公钥\私人 ssh避password登陆
- New job insights ~ leave the old and welcome the new~
- Errors made in the development of merging the quantity of data in the set according to attributes
- Shortcut keys commonly used in idea
- Comparison of picture beds of free white whoring
- 制作带照明的DIY焊接排烟器
- AcWing 904. 虫洞 题解(spfa求负环)
猜你喜欢
![Yiwen takes you into [memory leak]](/img/a8/bd1a57ef3bde8910eff2a5f68296df.png)


随机推荐
Add PDF Title floating window
New job insights ~ leave the old and welcome the new~
The GPG keys listed for the "MySQL 8.0 community server" repository are already ins
POJ 3177 Redundant Paths POJ 3352 Road Construction(双连接)
AcWing 1148. Secret milk transportation problem solution (minimum spanning tree)
AcWing 1141. 局域网 题解(kruskalkruskal 求最小生成树)
PartyDAO如何在1年内把一篇推文变成了2亿美金的产品DAO
AcWing 346. Solution to the problem of water splashing festival in the corridor (deduction formula, minimum spanning tree)
How did partydao turn a tweet into a $200million product Dao in one year
Use nodejs to determine which projects are packaged + released
Appium基础 — Appium Inspector定位工具(一)
AcWing 904. 虫洞 题解(spfa求负环)
JS ES5也可以创建常量?
npm install 编译时报“Cannot read properties of null (reading ‘pickAlgorithm‘)“
百度飞将BMN时序动作定位框架 | 数据准备与训练指南 (上)
Errors made in the development of merging the quantity of data in the set according to attributes
WCF Foundation
Right mouse button customization
字符串转成日期对象
爬虫实战(六):爬笔趣阁小说