当前位置:网站首页>ROS visualization of 3D target detection
ROS visualization of 3D target detection
2022-08-02 05:30:00 【hello689】
Laboratory has a radium godC16的激光雷达,Recently in my hand,Want to to play.Original intention is to do a real time detection,通过ROSLaser radar for laser point cloud,用pointpillarsModels to real-time 3 d target detection task.But god radiumc16That a laser radar,不太好处理,Now can only use their own drive,In a real-time display.So thought is at the bottom of the,Storage of radium god beforec16的点云数据,再用ros进行三维目标检测.
1. 思路:
通过rosTo realize the point cloud news订阅和检测框bbox消息的发布,To achieve the function of a testing results visualization.
2. 实验环境:
- Ubuntu16.04
- cuda 10.1
- ros-kinetic
Testing environment mainly depends on theOpenPCDet,Environmental structures, refer to this article I博客
3. 步骤:
1. 前提条件
已经搭建过了OpenPCDet.
已经搭建了ROS环境,我用的是kinetic版本,With other versions should also can.
2. 编译环境
Create a workspace and into the
mkdir -p ~/pointpillars_ros/src
cd pointpillars_ros/src
将ROSPackage copy or clone to the current folder
git clone https://github.com/BIT-DYN/pointpillars_ros
cd ..
编译
# To build a goodopenpcdet环境
conda activate openpcdet
pip install --user rospkg catkin_pkg
pip install pyquaternion
# 因为我用的是kinetic,所以需要安装pcl-ros,We don't have to install the above version
sudo apt-get install ros-kinetic-pcl-ros
sudo apt-get install ros-kinetic-jsk-recognition-msg
sudo apt-get install ros-kinetic-jsk-rviz-plugins
## 注意,执行catkin_make时,In the outermost folder,Also is my example of~/pointpillars_ros
catkin_make
迁移OpenPCDet中的一些文件
为保险起见,I will be here all these files into thesrc/pointpillars/tools文件夹下了.
修改代码
ros.py代码
# Below the path to your own
sys.path.append("/home/ubuntu/pointpillars_ros/src/pointpillars_ros") # Line 22
# 54行后边
""" Initialize ros parameters """
config_path = rospy.get_param("/config_path", "/home/ubuntu/pointpillars_ros/src/pointpillars_ros/tools/cfgs/kitti_models/pointpillar.yaml")
ckpt_path = rospy.get_param("/ckpt_path", "/home/ubuntu/pointpillars_ros/src/pointpillars_ros/tools/models/pointpillar.pth")
# Subscribe to the laser point cloud name,改成自己的,我用的是kitti的.bag文件
self.sub_velo = rospy.Subscriber("/kitti/velo/pointcloud", PointCloud2, self.lidar_callback, queue_size=1, buff_size=2**12)
launch/pointpillars.launch代码
<launch>
# Major changes under the first line
<node pkg="rosbag" type="play" name="player" output="log" args="-l /media/ubuntu/ximing/dataset/ros_kitti/bag/2011_10_03/kitti_2011_10_03_drive_0027_synced.bag" />
<node name="pointpillars_ros" type="ros.py" pkg="pointpillars_ros" output="screen"/>
<node type="rviz" name="rviz" pkg="rviz" args="-d $(find pointpillars_ros)/launch/pointpillars.rviz" />
</launch>
launch/pointpillars.rviz代码
Major changes topic name you use,I change the name of the point cloud and image
3. 运行
执行下边的命令
conda activate openpcdet
source ~/pointpillars_ros/devel/setup.bash
roslaunch pointpillars_ros pointpillars.launch
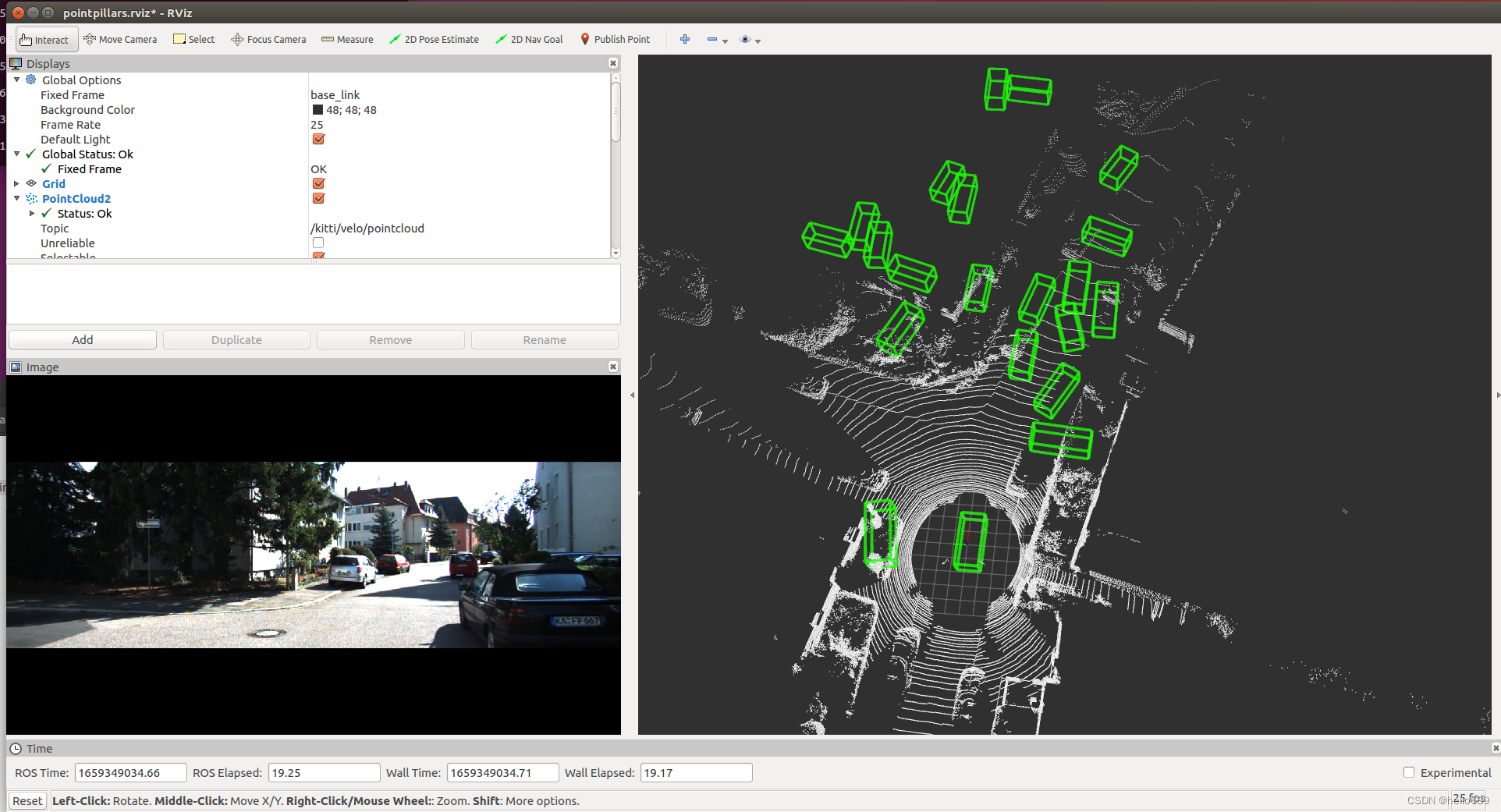
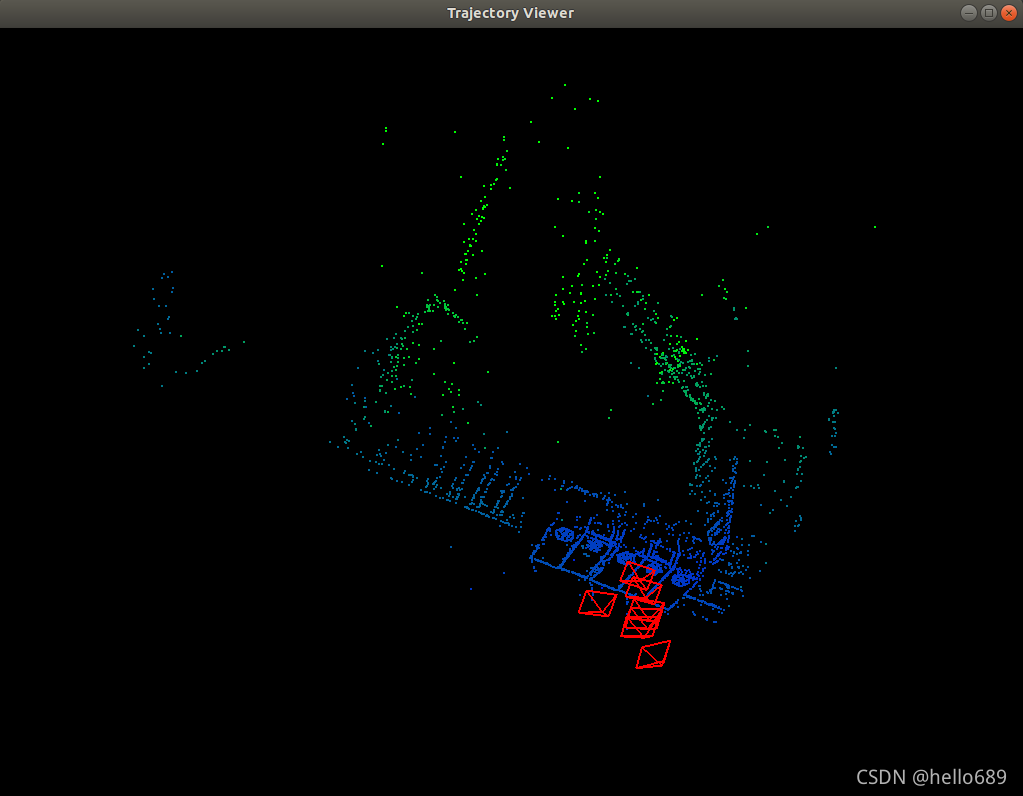
4. 图片效果:
我使用kittiThe original data of a certain period of time,转成.bag格式,用pointpillarsThe model test,效果也不行,猜测原因可能是1.Rotation matrix parameters didn't change;2.The show laser point cloud with test box delay,Not a good match;3.The third point may be not model(可能性不大).
 Below is to use the thorc16Radar acquisition in the lab30秒的数据,不到1分钟,696MB.
Below is to use the thorc16Radar acquisition in the lab30秒的数据,不到1分钟,696MB.
目前用rosbag recordSome stores the thorC16激光雷达的数据,Also not too will use radar real time read,实时检测.Late again to find a way to.
5. 视频效果
6. 主要参考资料:
Thank you very much for the share of the open source data,Let a small white I,也能快速demoAn effect.
遇到的问题,解决办法:
边栏推荐
- ESP32-C5 简介:乐鑫首款双频 Wi-Fi 6 MCU
- 吴恩达机器学习系列课程笔记——第十四章:降维(Dimensionality Reduction)
- 复制延迟案例(3)-单调读
- 2022-08-01:以下go语言代码输出什么?A:panic;B:5;C:6;D:编译错误。 package main import ( “fmt“ ) func main() {
- 单目3D目标检测之入门
- Pycharm platform import scikit-learn
- 字典基本操作方法
- BOM学习
- batch_size of deep learning foundation
- MySQL读写分离mysql-proxy部署
猜你喜欢

HyperLynx中层叠设计实例

数据复制系统设计(2)-同步复制与异步复制
Nexus 5手机使用Nexmon工具获取CSI信息

2022-08-01:以下go语言代码输出什么?A:panic;B:5;C:6;D:编译错误。 package main import ( “fmt“ ) func main() {

BOM学习
![[Win11] PowerShell无法激活Conda虚拟环境](/img/53/464ffb5ef80ce8f6ee19e9ea96c159.png)
[Win11] PowerShell无法激活Conda虚拟环境
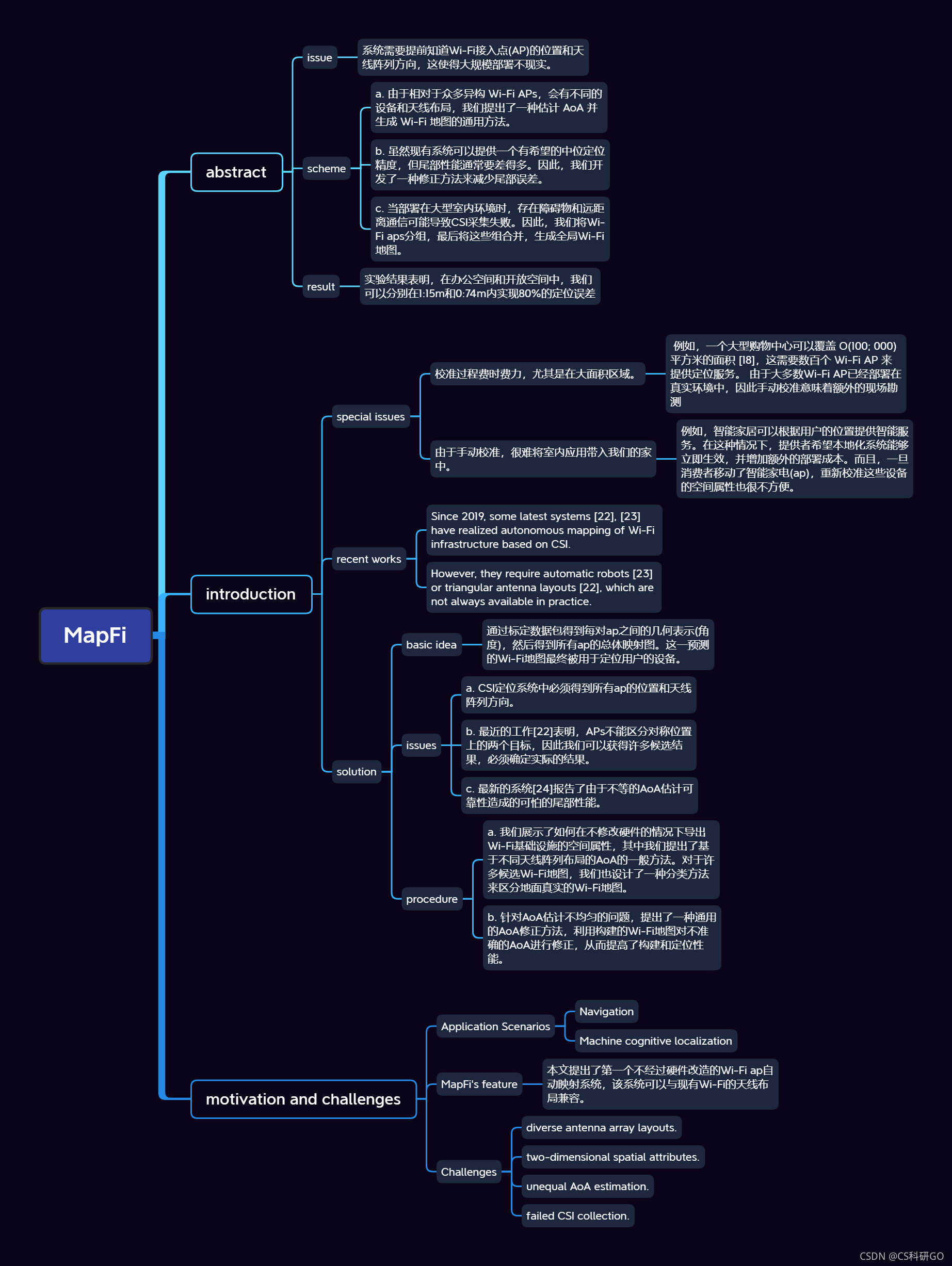
MapFi paper structure organization
从事功能测试1年,裸辞1个月,找不到工作的“我”怎么办?
【FreeRTOS】12 任务通知——更省资源的同步方式
Deep Blue Academy - 14 Lectures on Visual SLAM - Chapter 7 Homework
随机推荐
Arduino框架下 ESP32看门狗使用示例
科研笔记(八) 深度学习及其在 WiFi 人体感知中的应用(下)
什么是接触电流怎么测?
使用 Fastai 构建食物图像分类器
科研笔记(五) SLAC WiFi Fingerprint+ Step counter融合定位
this指向问题
多主复制下处理写冲突(1)-同步与异步冲突检测及避免冲突
侦听器watch及其和计算属性、methods方法的总结
吴恩达机器学习系列课程笔记——第十五章:异常检测(Anomaly Detection)
深度学习基础之批量归一化(BN)
数据复制系统设计(3)-配置新的从节点及故障切换
ADSP21489数据手册表摘要
科研笔记(八) 深度学习及其在 WiFi 人体感知中的应用(上)
吴恩达机器学习系列课程笔记——第十三章:聚类(Clustering)
Liunx服务环境部署
ScholarOne Manuscripts submits journal LaTeX file and cannot convert PDF successfully!
多主复制下处理写冲突(3)-收敛至一致的状态及自定义冲突解决逻辑
Computer Basics
Transfer of UKlog.dat and QQ, WeChat files
The CCF brush topic tour - the first topic