当前位置:网站首页>FAST-LIO2 code analysis (2)
FAST-LIO2 code analysis (2)
2022-08-01 23:37:00 【Hermit_Rabbit】
0. 简介
The operation of data acquisition and feature point extraction of lidar is described above,This section we will be aroundIMU_ProcessingThis section will introduce.
1. ImuProcess类定义
在ImuProcess.hpp中,It's done right from the startImuProcess类的申明,Inside we can see inimuThe most important of these are the two characteristics of angular velocity and acceleration,It's with visionSLAM的imuFusion is very similar.
//Determine whether the time of the point is reversed
const bool time_list(PointType &x, PointType &y) {
return (x.curvature < y.curvature); };
/// *************IMU Process and undistortion
class ImuProcess
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
ImuProcess();
~ImuProcess();
void Reset();
void Reset(double start_timestamp, const sensor_msgs::ImuConstPtr &lastimu);
void set_extrinsic(const V3D &transl, const M3D &rot);
void set_extrinsic(const V3D &transl);
void set_extrinsic(const MD(4, 4) & T);
void set_gyr_cov(const V3D &scaler);
void set_acc_cov(const V3D &scaler);
void set_gyr_bias_cov(const V3D &b_g);
void set_acc_bias_cov(const V3D &b_a);
Eigen::Matrix<double, 12, 12> Q;
void Process(const MeasureGroup &meas, esekfom::esekf<state_ikfom, 12, input_ikfom> &kf_state, PointCloudXYZI::Ptr pcl_un_);
ofstream fout_imu; // imuparameter output file
V3D cov_acc; //Acceleration measurement covariance
V3D cov_gyr; //Angular velocity measurement covariance
V3D cov_acc_scale; //Acceleration measurement covariance
V3D cov_gyr_scale; //Angular velocity measurement covariance
V3D cov_bias_gyr; //Angular velocity measurement covariance bias
V3D cov_bias_acc; //Acceleration measurement covariance bias
double first_lidar_time; //The first point cloud time of the current frame
private:
void IMU_init(const MeasureGroup &meas, esekfom::esekf<state_ikfom, 12, input_ikfom> &kf_state, int &N);
void UndistortPcl(const MeasureGroup &meas, esekfom::esekf<state_ikfom, 12, input_ikfom> &kf_state, PointCloudXYZI &pcl_in_out);
PointCloudXYZI::Ptr cur_pcl_un_; //The point cloud of the current frame is not dedistorted
sensor_msgs::ImuConstPtr last_imu_; // 上一帧imu
deque<sensor_msgs::ImuConstPtr> v_imu_; // imu队列
vector<Pose6D> IMUpose; // imu位姿
vector<M3D> v_rot_pcl_; //未使用
M3D Lidar_R_wrt_IMU; // lidar到IMUof rotating external parameters
V3D Lidar_T_wrt_IMU; // lidar到IMUThe location external parameter
V3D mean_acc; //mean acceleration,用于计算方差
V3D mean_gyr; //Average angular velocity,用于计算方差
V3D angvel_last; //The angular velocity of the previous frame
V3D acc_s_last; //The acceleration of the previous frame
double start_timestamp_; //开始时间戳
double last_lidar_end_time_; //Last frame end timestamp
int init_iter_num = 1; //初始化迭代次数
bool b_first_frame_ = true; //Is it the first frame
bool imu_need_init_ = true; //是否需要初始化imu
};
2. Constructor and incoming function
The first is to call the initialized constructor and reset function.
ImuProcess::ImuProcess()
: b_first_frame_(true), imu_need_init_(true), start_timestamp_(-1)
{
init_iter_num = 1; //初始化迭代次数
Q = process_noise_cov(); //调用use-ikfom.hpp里面的process_noise_covComplete the initialization of the noise covariance
cov_acc = V3D(0.1, 0.1, 0.1); //Acceleration measurement covariance initialization
cov_gyr = V3D(0.1, 0.1, 0.1); //Angular velocity measurement covariance initialization
cov_bias_gyr = V3D(0.0001, 0.0001, 0.0001); //Angular velocity measurement covariance bias initialization
cov_bias_acc = V3D(0.0001, 0.0001, 0.0001); //Acceleration measurement covariance bias initialization
mean_acc = V3D(0, 0, -1.0);
mean_gyr = V3D(0, 0, 0);
angvel_last = Zero3d; //The angular velocity of the previous frame is initialized
Lidar_T_wrt_IMU = Zero3d; // lidar到IMUThe positional extrinsic parameter is initialized
Lidar_R_wrt_IMU = Eye3d; // lidar到IMUThe rotation extrinsic parameter is initialized
last_imu_.reset(new sensor_msgs::Imu()); //上一帧imu初始化
}
ImuProcess::~ImuProcess() {
}
//重置参数
void ImuProcess::Reset()
{
// ROS_WARN("Reset ImuProcess");
mean_acc = V3D(0, 0, -1.0);
mean_gyr = V3D(0, 0, 0);
angvel_last = Zero3d;
imu_need_init_ = true; //是否需要初始化imu
start_timestamp_ = -1; //开始时间戳
init_iter_num = 1; //初始化迭代次数
v_imu_.clear(); // imu队列清空
IMUpose.clear(); // imuPose is empty
last_imu_.reset(new sensor_msgs::Imu()); //上一帧imu初始化
cur_pcl_un_.reset(new PointCloudXYZI()); //The point cloud of the current frame is initialized without dewarping
}
Then there is the incoming of external parameters and bias covariance
//Incoming external parameters,包含R,T
void ImuProcess::set_extrinsic(const MD(4, 4) & T)
{
Lidar_T_wrt_IMU = T.block<3, 1>(0, 3);
Lidar_R_wrt_IMU = T.block<3, 3>(0, 0);
}
//Incoming external parameters,包含T
void ImuProcess::set_extrinsic(const V3D &transl)
{
Lidar_T_wrt_IMU = transl;
Lidar_R_wrt_IMU.setIdentity();
}
// Incoming external parameters,包含R,T
void ImuProcess::set_extrinsic(const V3D &transl, const M3D &rot)
{
Lidar_T_wrt_IMU = transl;
Lidar_R_wrt_IMU = rot;
}
// Pass in the gyroscope angular velocity covariance
void ImuProcess::set_gyr_cov(const V3D &scaler)
{
cov_gyr_scale = scaler;
}
// Pass in the accelerometer acceleration covariance
void ImuProcess::set_acc_cov(const V3D &scaler)
{
cov_acc_scale = scaler;
}
// Pass in the gyroscope angular velocity covariance bias
void ImuProcess::set_gyr_bias_cov(const V3D &b_g)
{
cov_bias_gyr = b_g;
}
// Pass in the accelerometer acceleration covariance bias
void ImuProcess::set_acc_bias_cov(const V3D &b_a)
{
cov_bias_acc = b_a;
}
3. IMU初始化
这一部分主要是IMU的初始化,内部主要是对x_和P_完成了初始化,这里涉及到esikfomKnowledge inside the file,I won't talk about it here for now
void ImuProcess::IMU_init(const MeasureGroup &meas, esekfom::esekf<state_ikfom, 12, input_ikfom> &kf_state, int &N)
{
/** 1. 初始化重力、陀螺偏差、acc和陀螺仪协方差 /** 2. 将加速度测量值标准化为单位重力**/
//这里应该是静止初始化
V3D cur_acc, cur_gyr;
if (b_first_frame_) //判断是否为第一帧
{
Reset(); //重置参数
N = 1; //将迭代次数置1
b_first_frame_ = false;
const auto &imu_acc = meas.imu.front()->linear_acceleration; //从common_lib.h中拿到imuacceleration at the initial moment
const auto &gyr_acc = meas.imu.front()->angular_velocity; //从common_lib.h中拿到imuAngular velocity at the initial moment
mean_acc << imu_acc.x, imu_acc.y, imu_acc.z; //Acceleration measurements are taken as the initialization mean
mean_gyr << gyr_acc.x, gyr_acc.y, gyr_acc.z; //Angular velocity measurements are taken as the initialization mean
first_lidar_time = meas.lidar_beg_time; //will be currentimu帧对应的lidartime as the initial time
}
//计算方差
for (const auto &imu : meas.imu) //拿到所有的imu帧
{
const auto &imu_acc = imu->linear_acceleration;
const auto &gyr_acc = imu->angular_velocity;
cur_acc << imu_acc.x, imu_acc.y, imu_acc.z;
cur_gyr << gyr_acc.x, gyr_acc.y, gyr_acc.z;
//Based on the current frame and the mean difference as an update of the mean
mean_acc += (cur_acc - mean_acc) / N;
mean_gyr += (cur_gyr - mean_gyr) / N;
//.cwiseProduct()对应系数相乘
//The mean changes after each iteration,最后的方差公式中减的应该是最后的均值
// https://blog.csdn.net/weixin_44479136/article/details/90510374 方差迭代计算公式
//按照博客推导出来的下面方差递推公式有两种
//第一种是
cov_acc = cov_acc * (N - 1.0) / N + (cur_acc - mean_acc).cwiseProduct(cur_acc - mean_acc) / (N - 1.0);
cov_gyr = cov_gyr * (N - 1.0) / N + (cur_gyr - mean_gyr).cwiseProduct(cur_gyr - mean_gyr) / (N - 1.0);
//第二种是
// cov_acc = cov_acc * (N - 1.0) / N + (cur_acc - mean_acc).cwiseProduct(cur_acc - 上一次的mean_acc) / N;
// cov_gyr = cov_gyr * (N - 1.0) / N + (cur_gyr - mean_gyr).cwiseProduct(cur_gyr - 上一次的mean_gyr) / N;
// cout<<"acc norm: "<<cur_acc.norm()<<" "<<mean_acc.norm()<<endl;
N++;
}
state_ikfom init_state = kf_state.get_x(); //在esekfom.hpp获得x_的状态
init_state.grav = S2(-mean_acc / mean_acc.norm() * G_m_s2); //从common_lib.hGravity in,And it is calculated with the unit gravity of the mean value of the acceleration measurementSO2The gravitational acceleration of the rotation matrix type
// state_inout.rot = Eye3d; // Exp(mean_acc.cross(V3D(0, 0, -1 / scale_gravity)));
init_state.bg = mean_gyr; //Angular velocity is measured as gyroscope bias
init_state.offset_T_L_I = Lidar_T_wrt_IMU; //将lidar和imuThe external parameter displacement is passed in
init_state.offset_R_L_I = Lidar_R_wrt_IMU; //将lidar和imuThe external parameter rotation is passed in
kf_state.change_x(init_state); //Pass in the initialization stateesekfom.hpp中的x_
esekfom::esekf<state_ikfom, 12, input_ikfom>::cov init_P = kf_state.get_P(); //在esekfom.hpp获得P_的协方差矩阵
init_P.setIdentity(); //Set the covariance matrix to the identity matrix
init_P(6, 6) = init_P(7, 7) = init_P(8, 8) = 0.00001; //Set the covariance of the position and rotation of the covariance matrix to 0.00001
init_P(9, 9) = init_P(10, 10) = init_P(11, 11) = 0.00001; //Set the covariance of the covariance matrix of velocity and pose to 0.00001
init_P(15, 15) = init_P(16, 16) = init_P(17, 17) = 0.0001; //Set the covariance of gravity and attitude of the covariance matrix to 0.0001
init_P(18, 18) = init_P(19, 19) = init_P(20, 20) = 0.001; //Set the gyroscope bias of the covariance matrix and the covariance of the attitude as 0.001
init_P(21, 21) = init_P(22, 22) = 0.00001; //will be the covariance matrixlidar和imuThe covariance of extrinsic displacements is set to 0.00001
kf_state.change_P(init_P); //Pass in the initialized covariance matrixesekfom.hpp中的P_
last_imu_ = meas.imu.back(); //将最后一帧的imu数据传入last_imu_中,暂时没用到
}
4. IMU更新
在UndistortPclNot only in the functionIMUforward information,There is also the issue of lidar de-distortion,This section we revolve aroundIMUThe forward propagation of ,The code is done in the form of iterationIMU数据的更新,并将acc和gyro的数据传入到ESKF中,The detailed formula will be discussed later.
…详情请参照古月居
边栏推荐
猜你喜欢
Background project Express-Mysql-Vue3-TS-Pinia page layout-sidebar menu
测试岗月薪5-9k,如何实现涨薪到25k?
![[C language advanced] file operation (2)](/img/4d/49d9603aeed16f1600d69179477eb3.png)
[C language advanced] file operation (2)
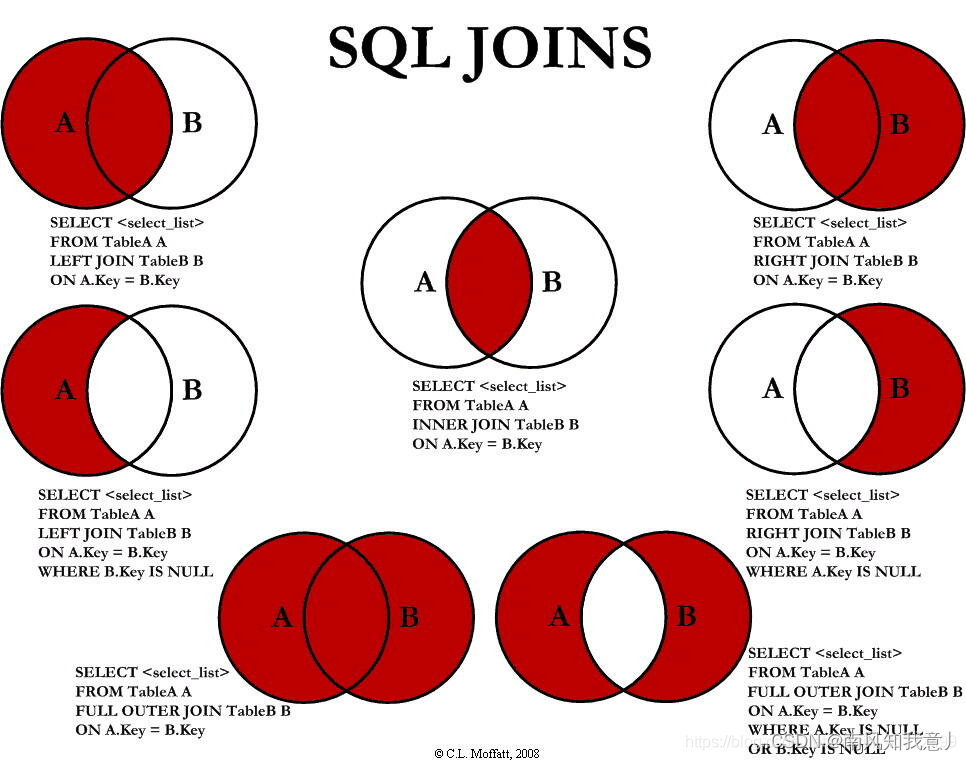
Sql之各种Join
![Thesis understanding [RL - Exp Replay] - Experience Replay with Likelihood-free Importance Weights](/img/f1/9824f32dd4fe4b3e94af3f945b1801.png)
Thesis understanding [RL - Exp Replay] - Experience Replay with Likelihood-free Importance Weights

Building a cloud-native DevOps environment

From 0 to 100: Notes on the Development of Enrollment Registration Mini Programs
云原生DevOps环境搭建

获取小猪民宿(短租)数据

请问什么是 CICD

随机推荐
分享一份接口测试项目(非常值得练手)
Is TCP reliable?Why?
避免使用 <b>、<i>、<s> 和 <u> 标签
怎样做才能让这条SQL变成一条危险的SQL?
解决端口占用
Special characters & escapes in bat
TCP 可靠吗?为什么?
访问控制台中的选定节点
[Recommended books] The first self-driving technology book
Chapter 19 Tips and Traps: Common Goofs for Novices
6132. All the elements in the array is equal to zero - quick sort method
PostgreSQL Basics--Common Commands
npm npm
辛普森悖论
仿牛客网项目第三章:开发社区核心功能(详细步骤和思路)
Quartus uses tcl files to quickly configure pins
软技能之UML图
[Camp Experience Post] 2022 Cybersecurity Summer Camp
架构基本概念和架构本质
Oracle database is set to read-only and read-write