当前位置:网站首页>Arduino controls a tiny hexapod 3D printing robot
Arduino controls a tiny hexapod 3D printing robot
2022-07-05 15:42:00 【acktomas】
Arduino Control the tiny hexapod 3D Printing robots
Some time ago , I am here Thingiverse I found a 3D Printed Micro-Hexapod.
I began my research in the following ways :
establish can 3D Print New accessories / Components
Explore possible ways to drive this hexapod displacement table .
give the result as follows :
A parameterization that fits it perfectly The battery seat , No screws are required
A parameterized pen holder , This hexapod robot can be converted into Drawing robot !
You can bluetooth 、 A smart phone ( You can also find one here Android Applications !) or PC Drive this hexapod robot
You can use Two pole To drive this hexapod robot
A hexapod robot can act as Light follower
Now you will see how to build a complete working hexapod robot !
The first 1 Step : List of materials


Need the following Print parts :
1 A miniature hexapod robot http://www.thingiverse.com/thing:5156( from ljon)
http://www.thingiverse.com/thing:34796( from carlosgs Remix )
file :body. stl and legs.stl
1x 4AA Battery clip
http://www.thingiverse.com/thing:109807( Provided by me )
file :battery_clip_4AA.stl
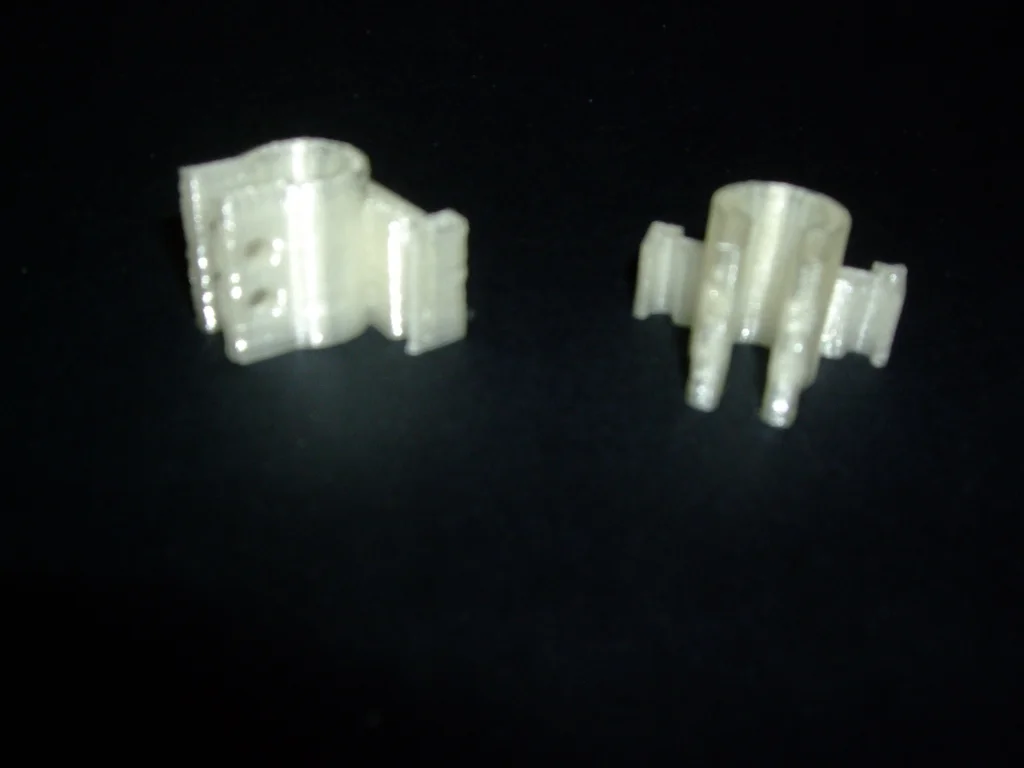
1x Penholder
http://www.thingiverse.com/thing:110331( from me)
file :PenHolder_hexapoduino_front.stl & PenHolder_hexapoduino_back.stl
You can finally print an insect head / smile / Put the others in front of the Hexapod , To personalize it .
It also needs to be Electronic parts :
- 1x Arduino Mini or Arduino UNO( Or compatible )
- 3x Microservo 9G
- 4x AA The battery ( Rechargeable better )
then , If you want to make a light following robot , You need :
- 2x LDR
- 2x 10K resistance
If you want to drive your robot with a nunchaku , You need :
- 1x nunchuk
- 1x nunchuk Adapter ( You can buy or buy from old / The damaged wiimote Remove )
- 1x 10K resistance
If you want to drive the robot through Bluetooth , You need to :
- 1x HC-05( Or compatible ) Bluetooth module
- 1x 2K2 resistance
- 1x TS2950 33( Or compatible ) Voltage regulator
The attachment
PenHolder_hexapoduino_front.stl
download
PenHolder_hexapoduino_back.stl
download
leg.stl
download
body.stl
download
battery_clip_square_4AA.stl
download
OpenSCAD_source.zip
download
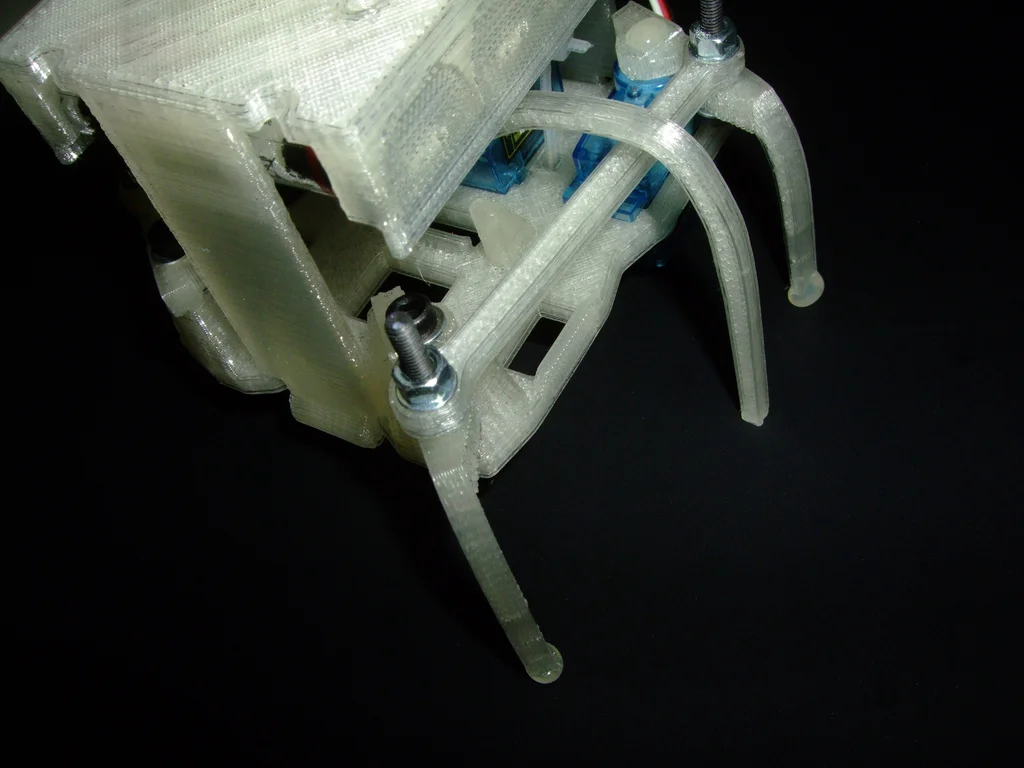
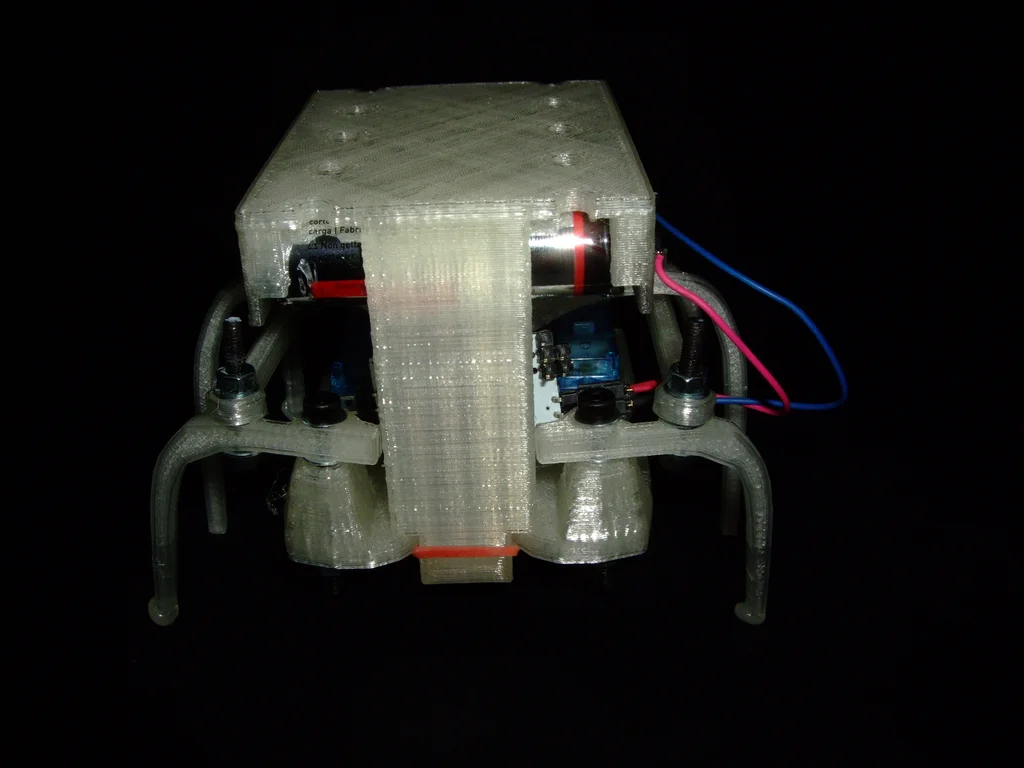
The first 2 Step : Build hexapods
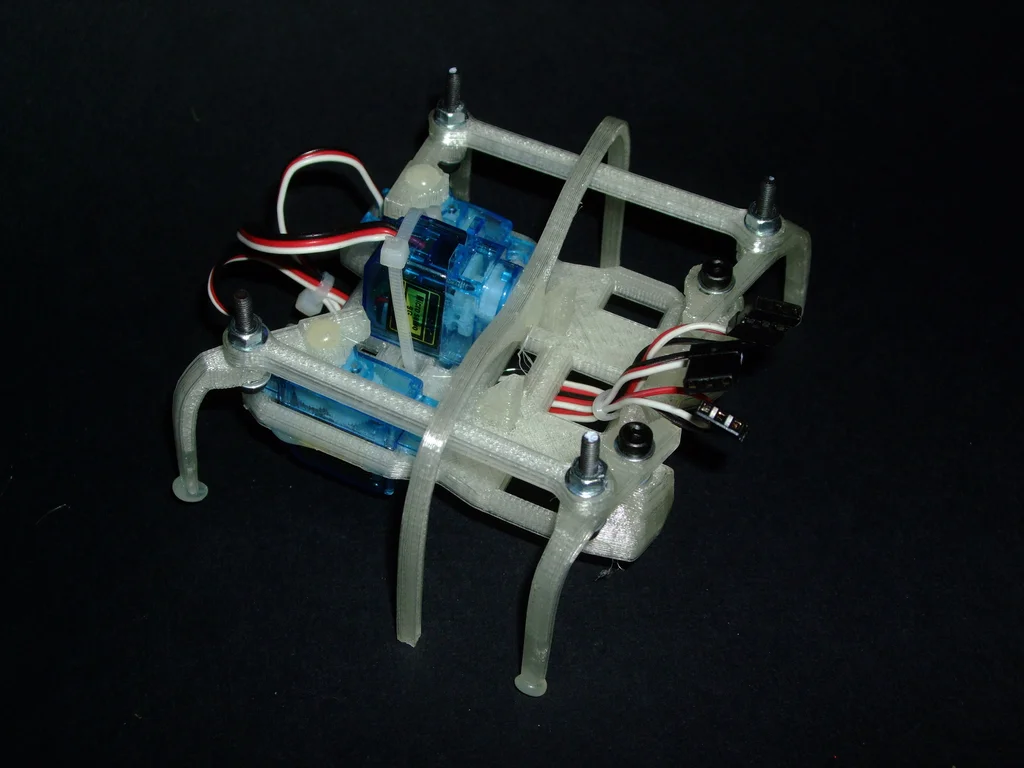
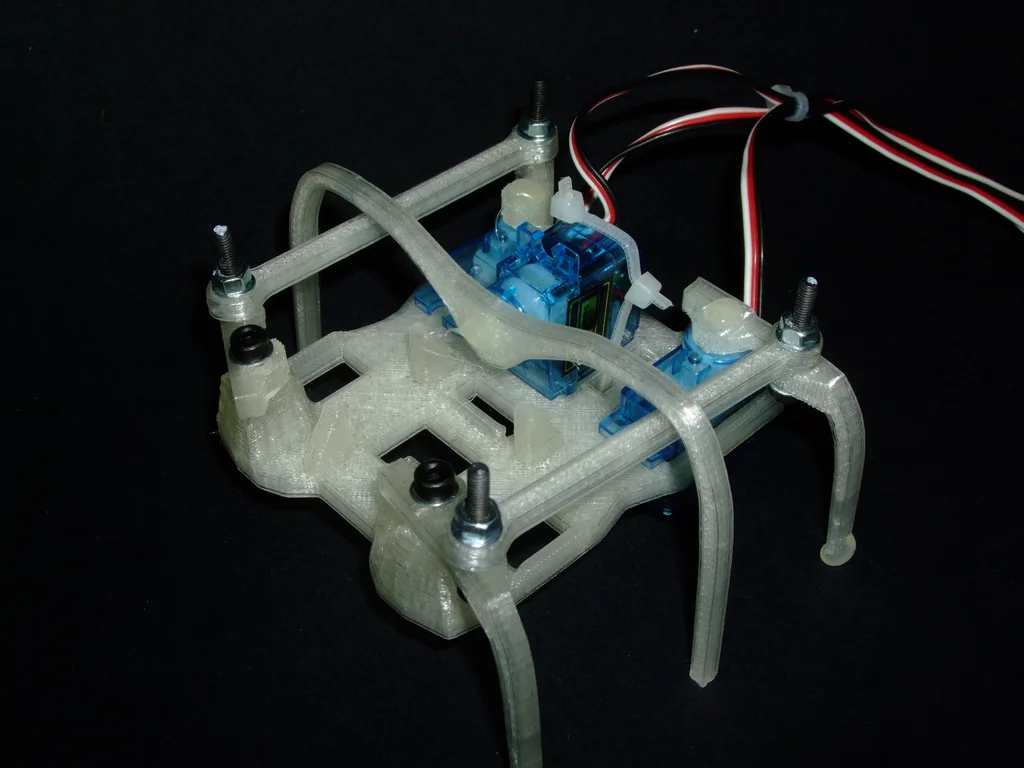
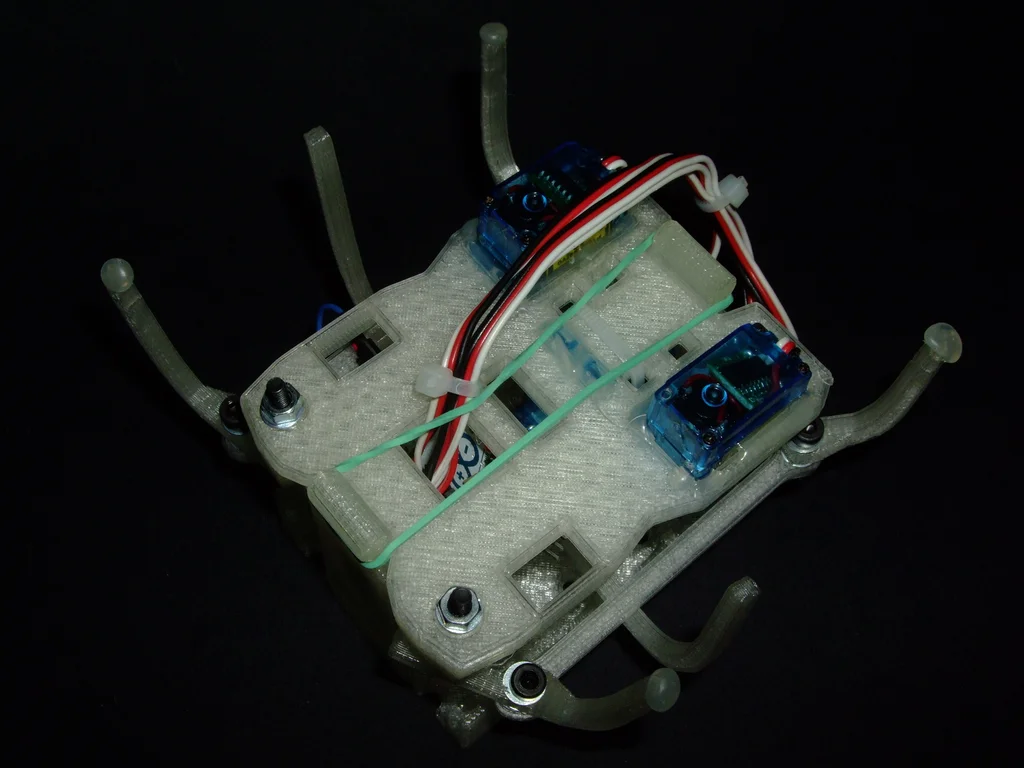
Build a hexapod robot It's really easy .
You can use hot glue to fix the servo motor on the board . Then use a few m3 screw (6 individual )、 Nut (6 individual ) And washers (12 individual ), You can fix the outrigger on the board .
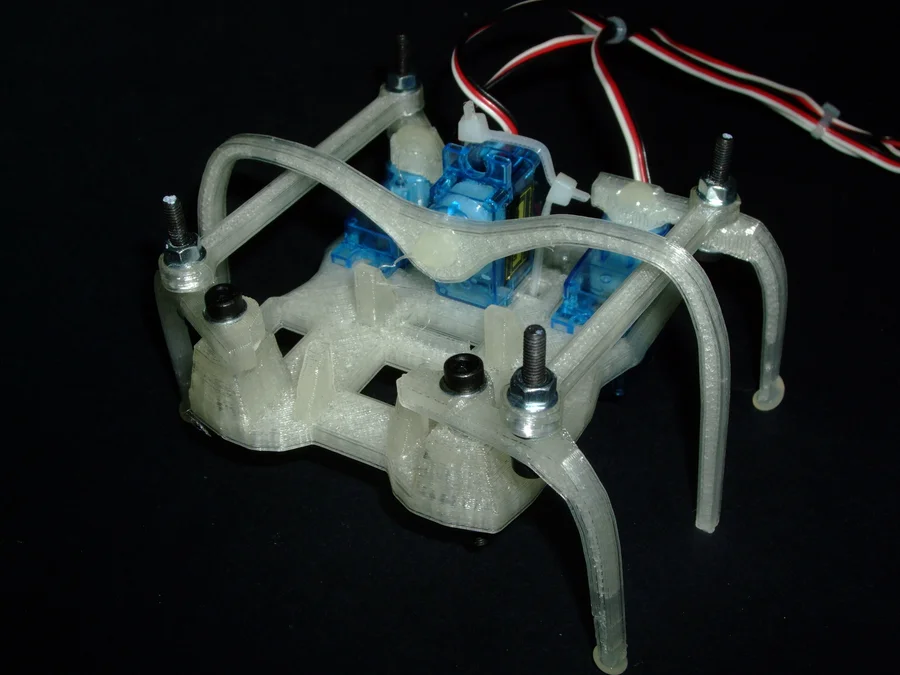
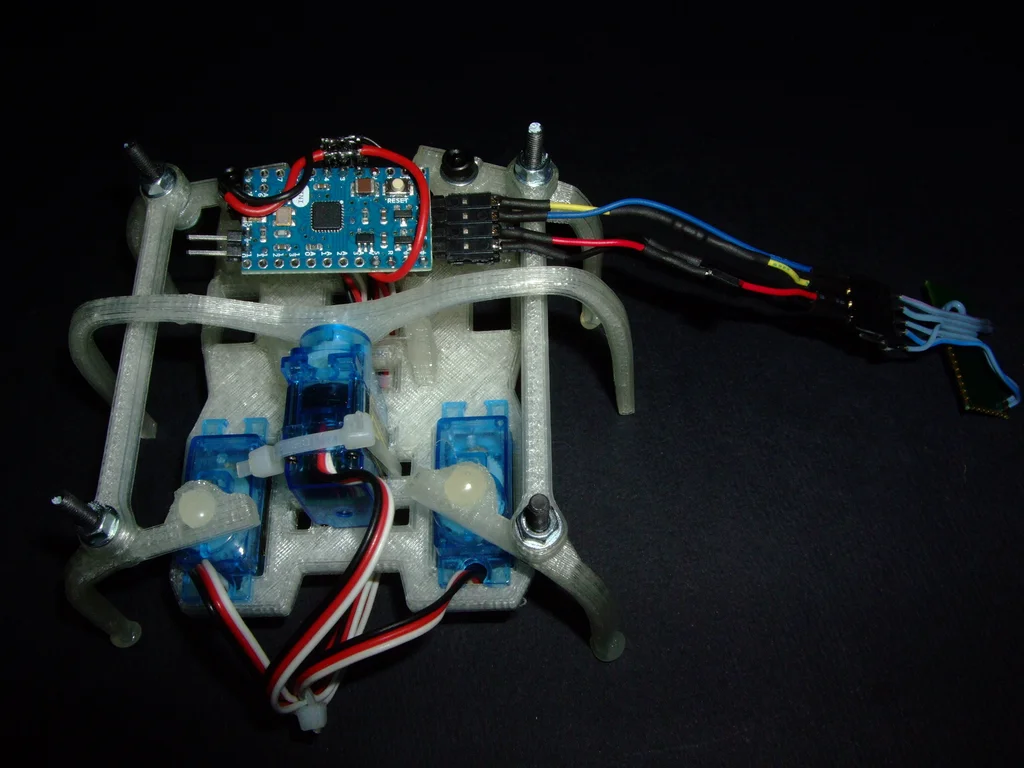
The first 3 Step : Connect the motor to Arduino And the power supply
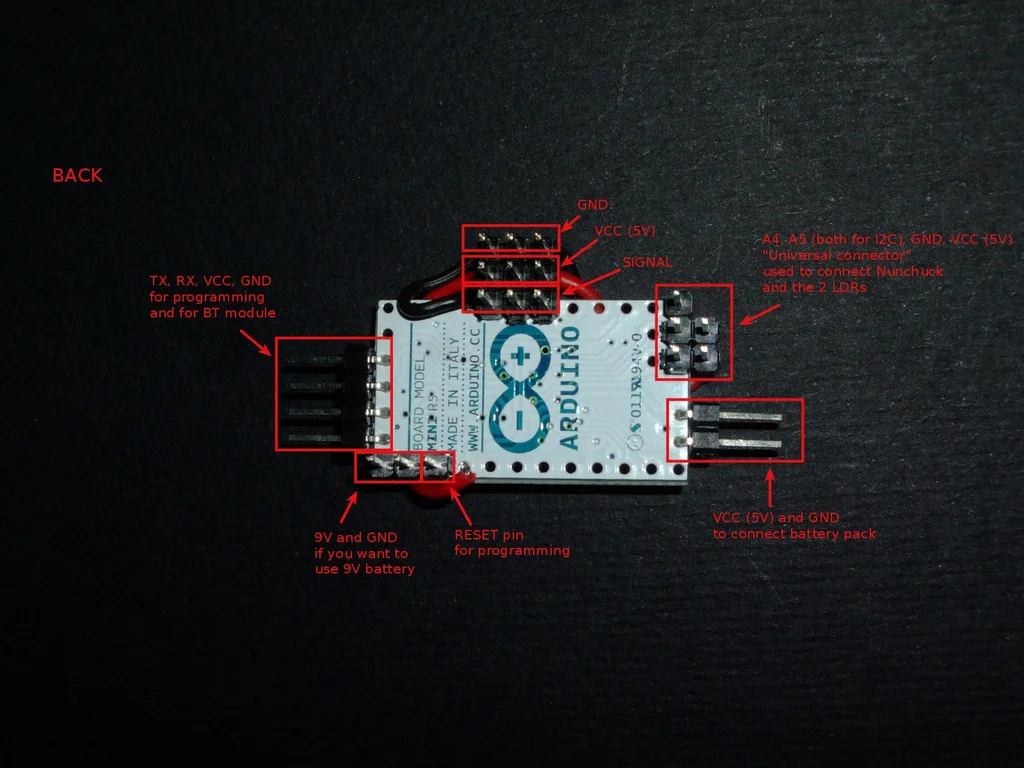
And then you need to Connect the servo motor To Arduino.
Servo motor has 3 One pin :
- The red one is for the power supply / vcc (5V)
- The black one is used for grounding (GND)
- The white one is used to drive the motor itself
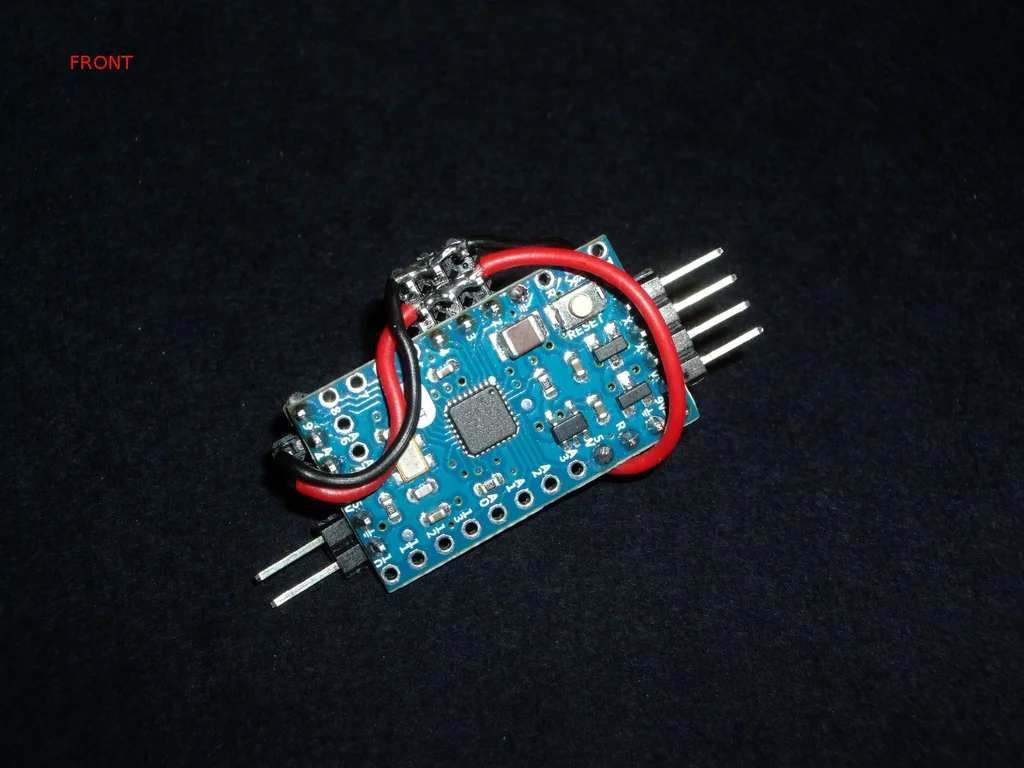
The signal line of the central servo motor must be connected to Arduino pin D2
The right servo motor must be connected to Arduino pin D3
The left servo motor must be connected to Arduino pin D4
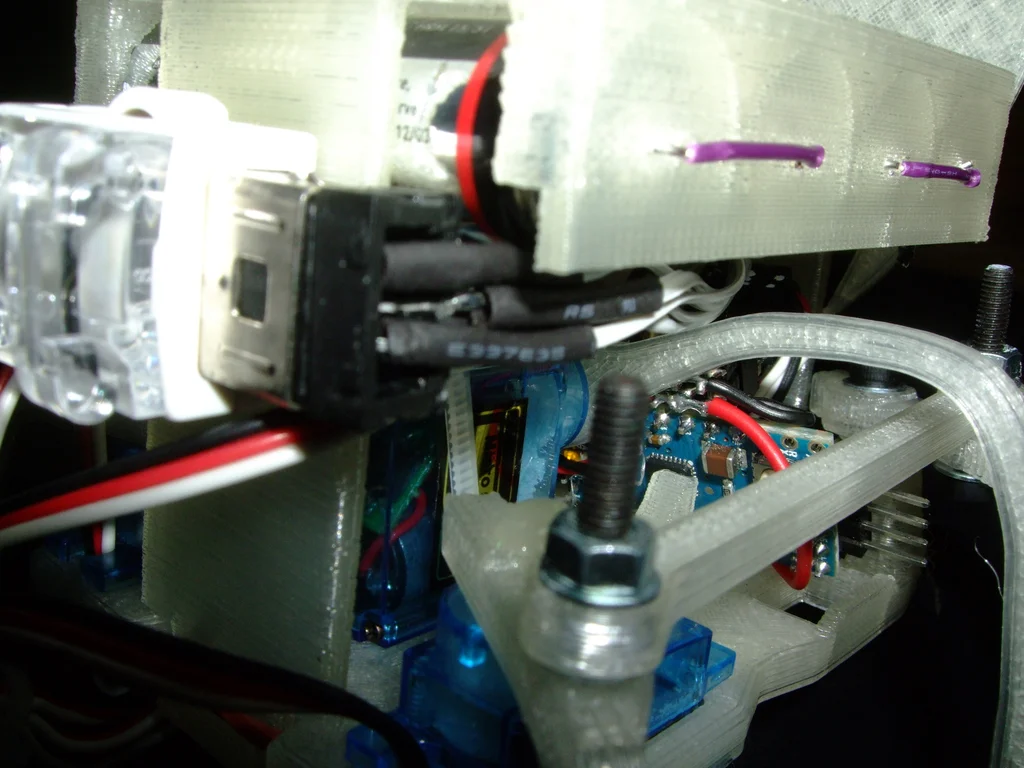
As mentioned earlier , You can use Arduino UNO or Arduino MINI, The steps are exactly the same . If you want to use Arduino Mini, Please check the photos . All pins available in this project are explained .
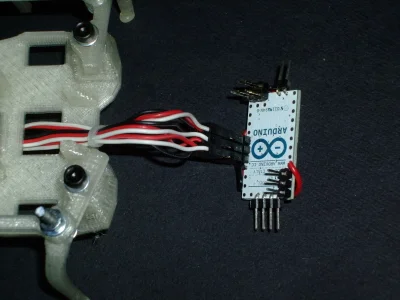
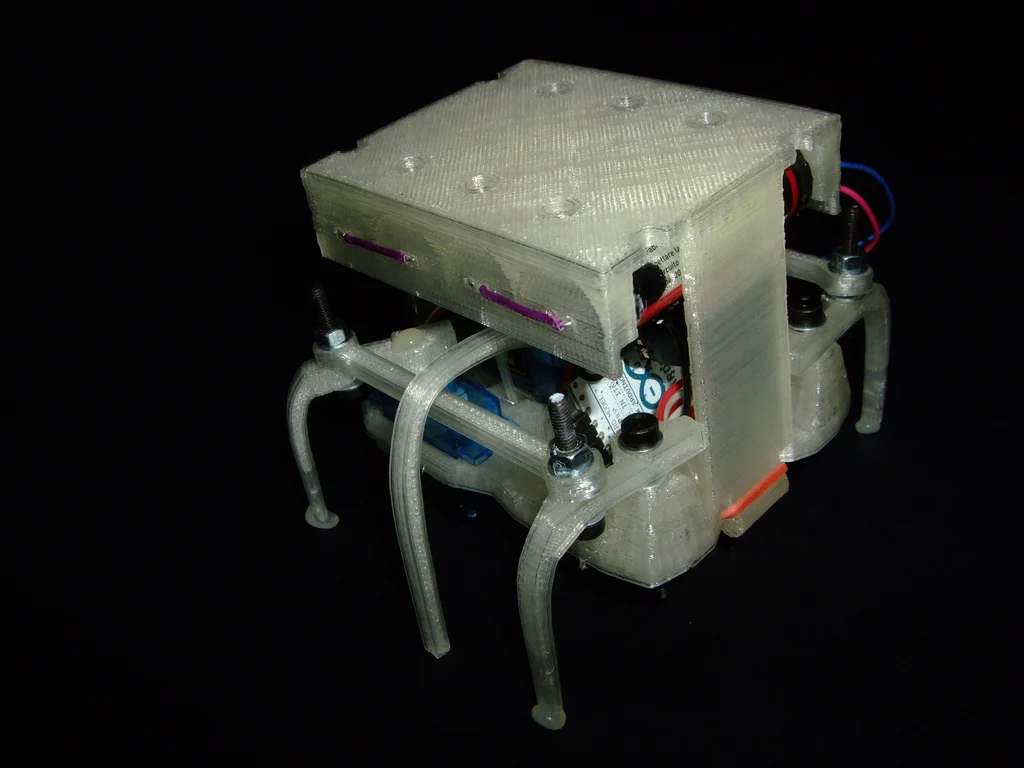
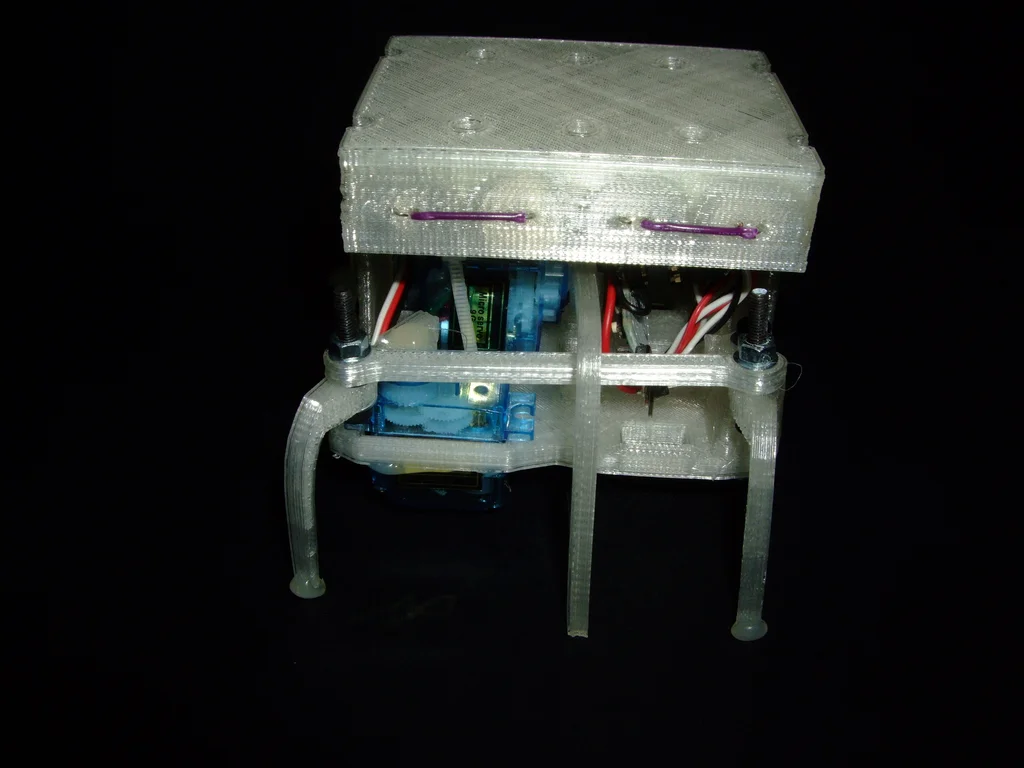
Connect the servo motor to Arduino after , You can use Arduino Install in the tray .
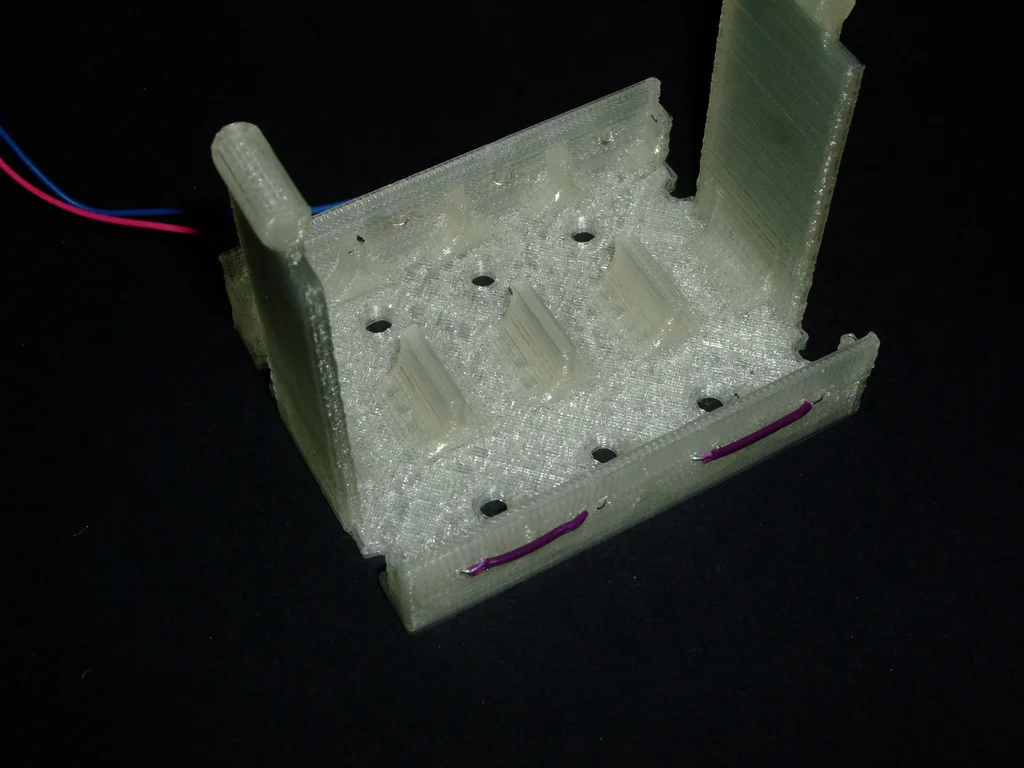
Then you need to work for Arduino And servo motor supply . You can choose 9v Battery or 4AA The battery ( Better ). under these circumstances , You need to prepare the battery holder , Create a circuit that serializes the battery .
The first 4 Step : First test !… And assemble all parts !
It's time for the first test .
And Arduino The libraries used together are ArduSnake:
https://github.com/Obijuan/ArduSnake Download and install it .
If you don't know how to Arduino Install the new library on , Please follow this guide :
https://docs.arduino.cc/software/ide-v1/tutorials/installing-libraries
You can use the code provided here to test :
http://www.thingiverse.com/download:100066
from Thingiverse user carlosgs Release , take skecth Upload to your Arduino in , You will see the first step of the Hexapod displacement table
If you don't know how to upload sketches to Arduino Mini, You can refer to here :https://docs.arduino.cc/retired/boards/arduino-mini-05
If the test is OK , We can continue to learn how to drive our hexapod robot !
Before that , You need to upload Complete function code !
Everything is here ( to update ):
https://github.com/pictux/Hexapoduino
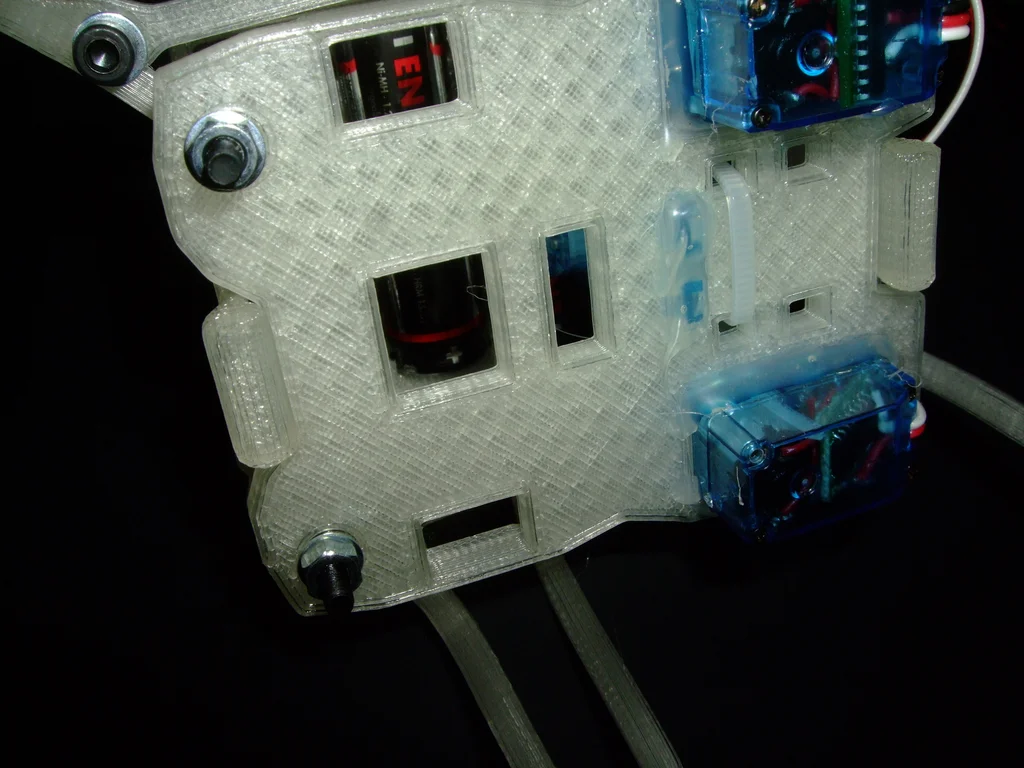
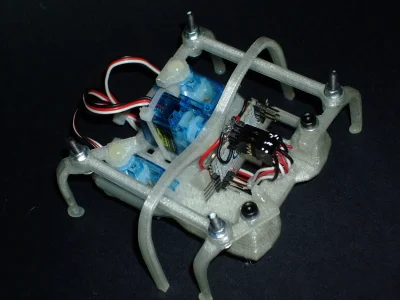
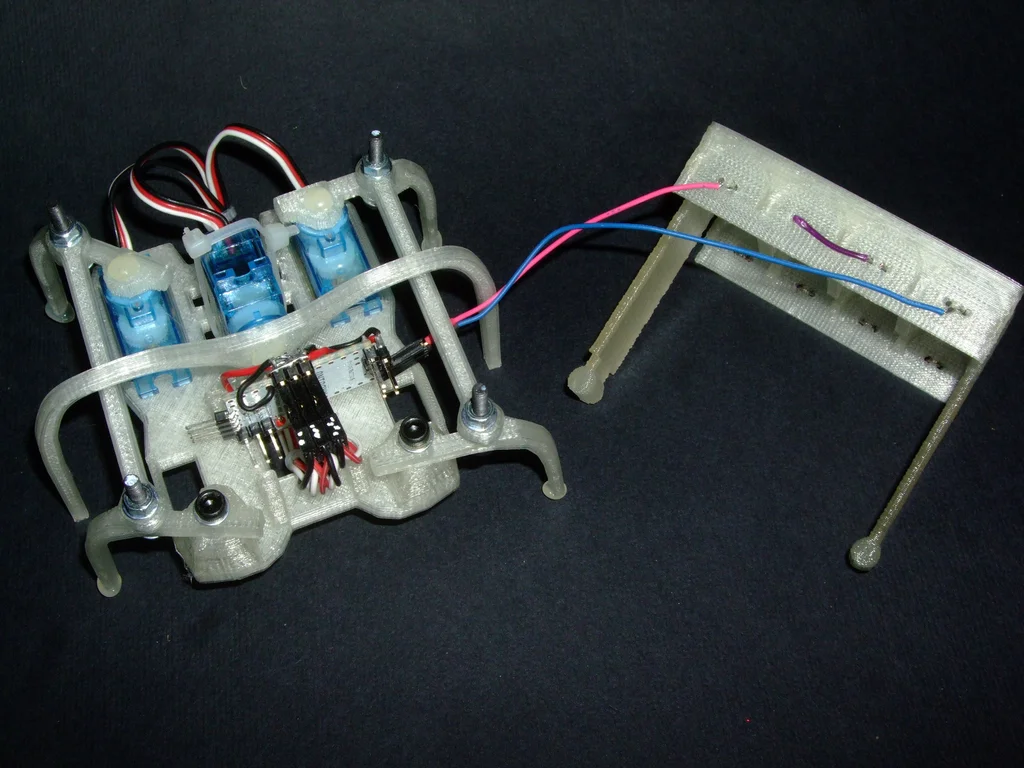
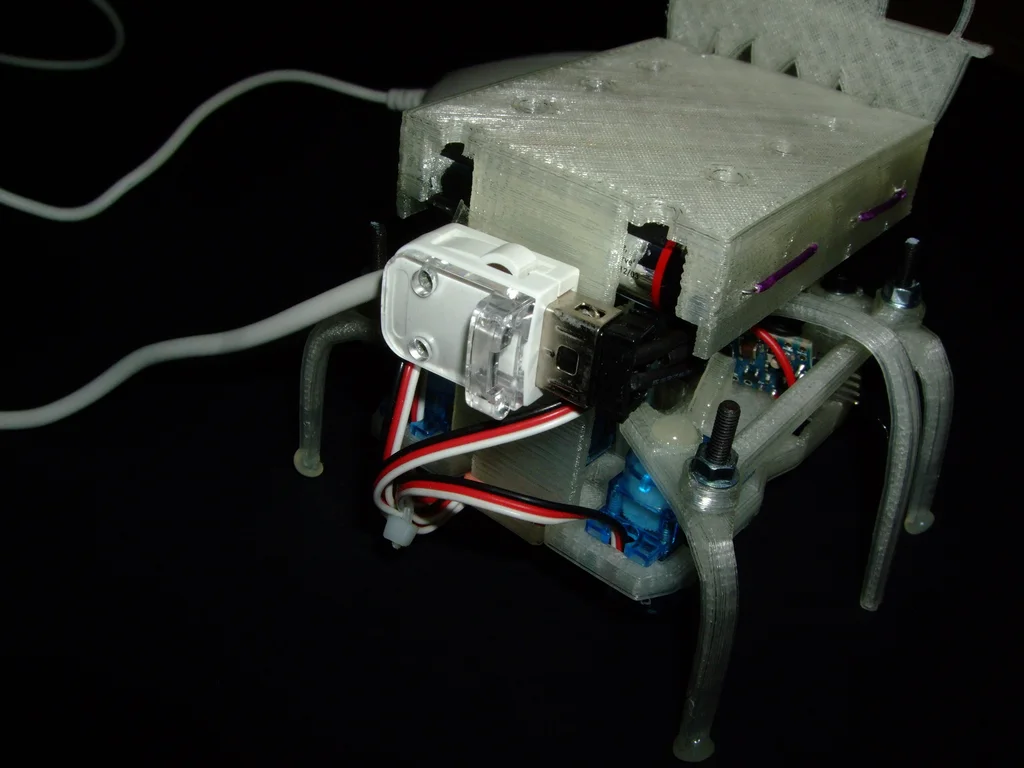
After the upload , Assemble all components : Place the battery holder on the top of the board . You can simply block it with a rubber band !
The attachment
[ Failed to transfer the external chain picture , The origin station may have anti-theft chain mechanism , It is suggested to save the pictures and upload them directly (img-69hxNlqx-1656990732687)(https://content.instructables.com/static/image/file.default.gif)]Hexapoduino.zip
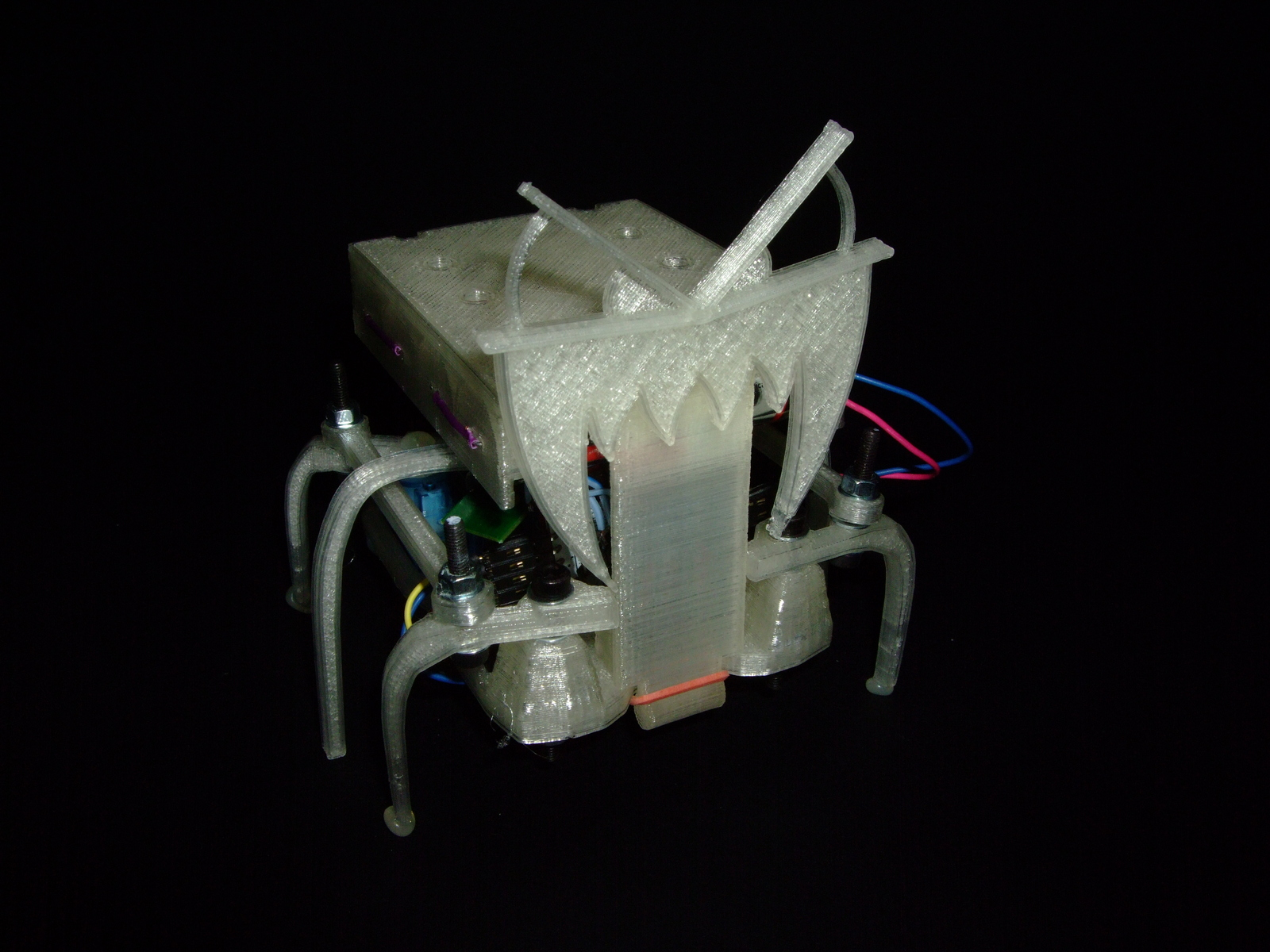
The first 5 Step : Hexapod as a follower of light
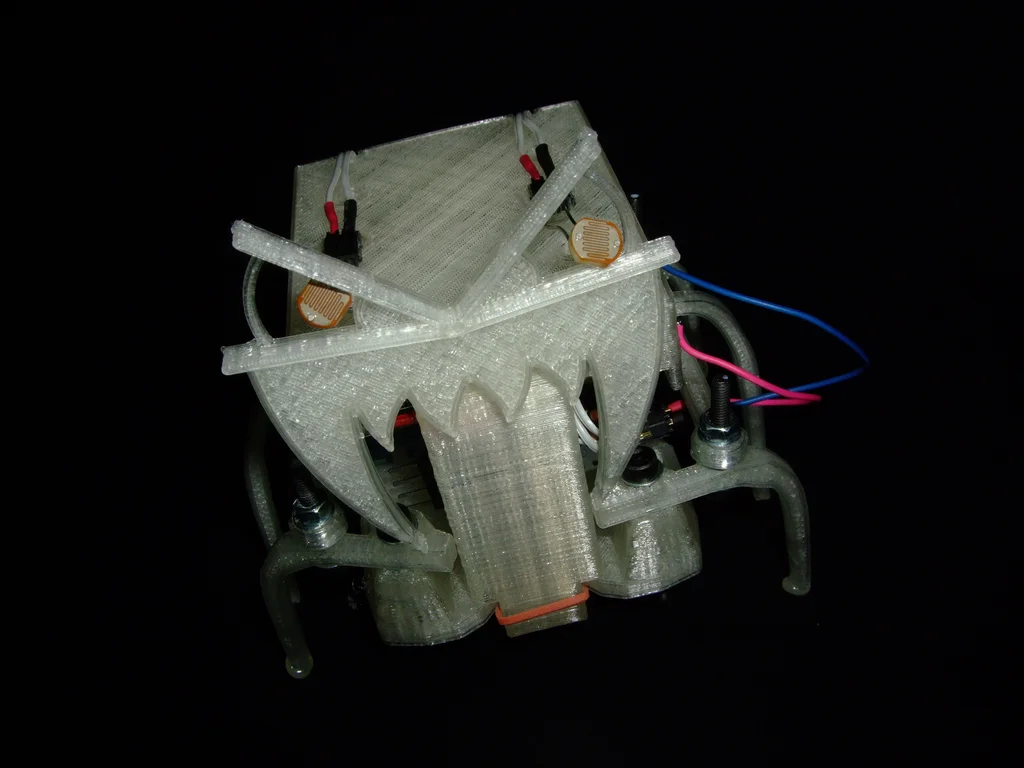
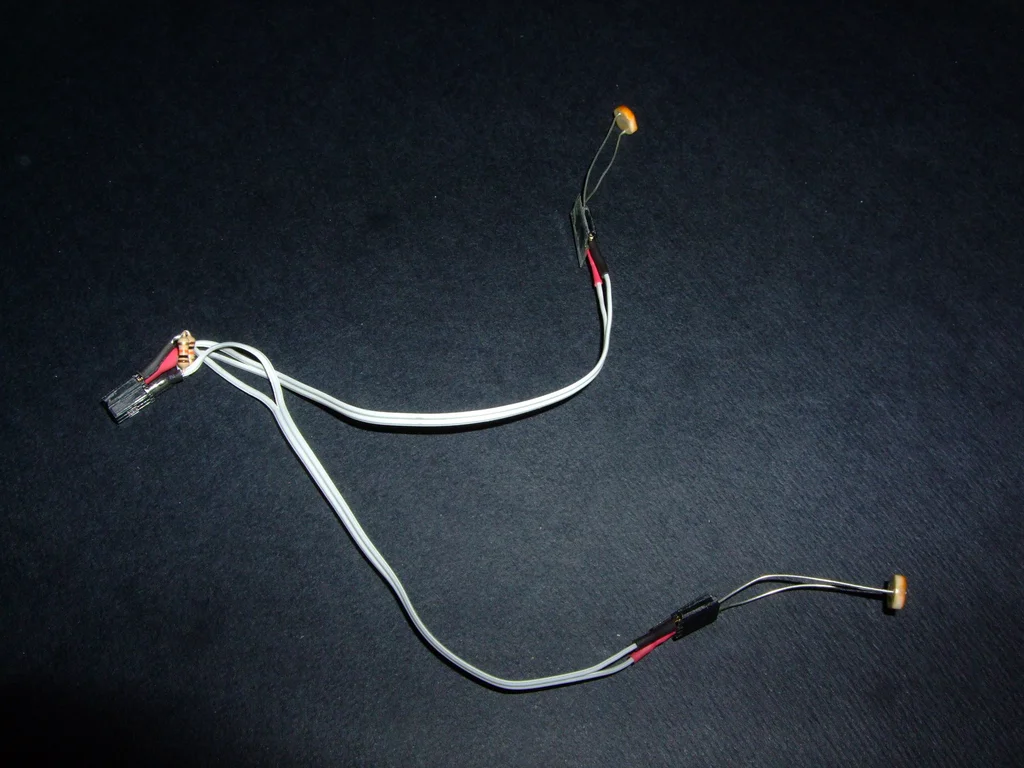
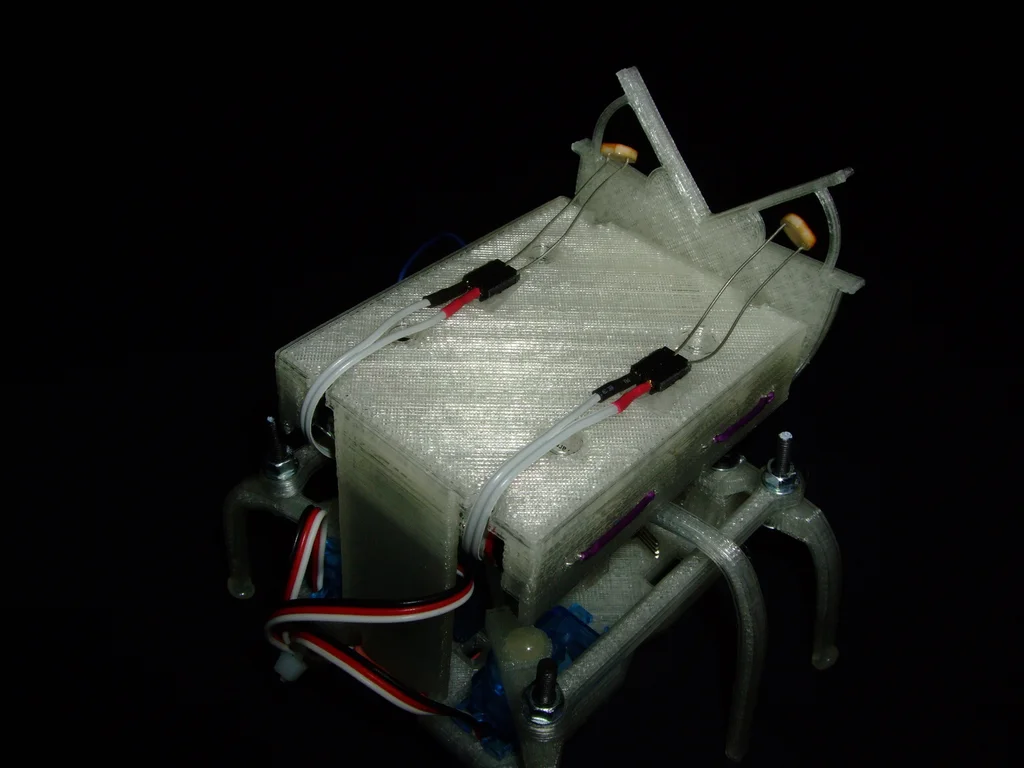
For this step , You need to :
- 2x LDR
- 2x 10K resistance
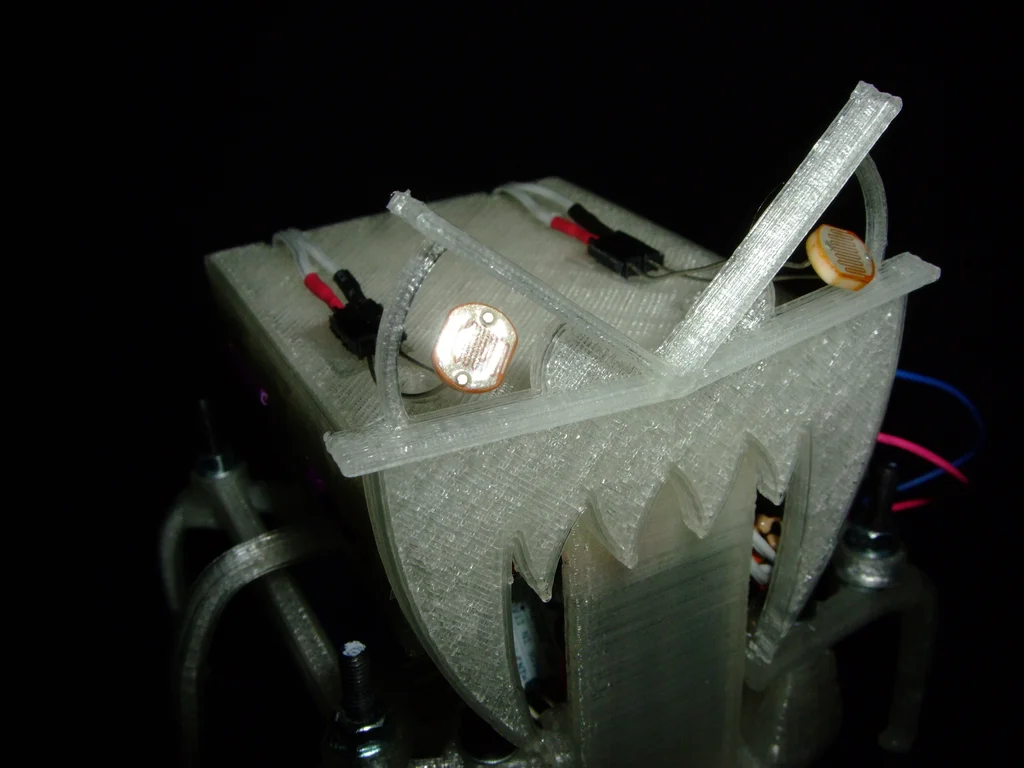
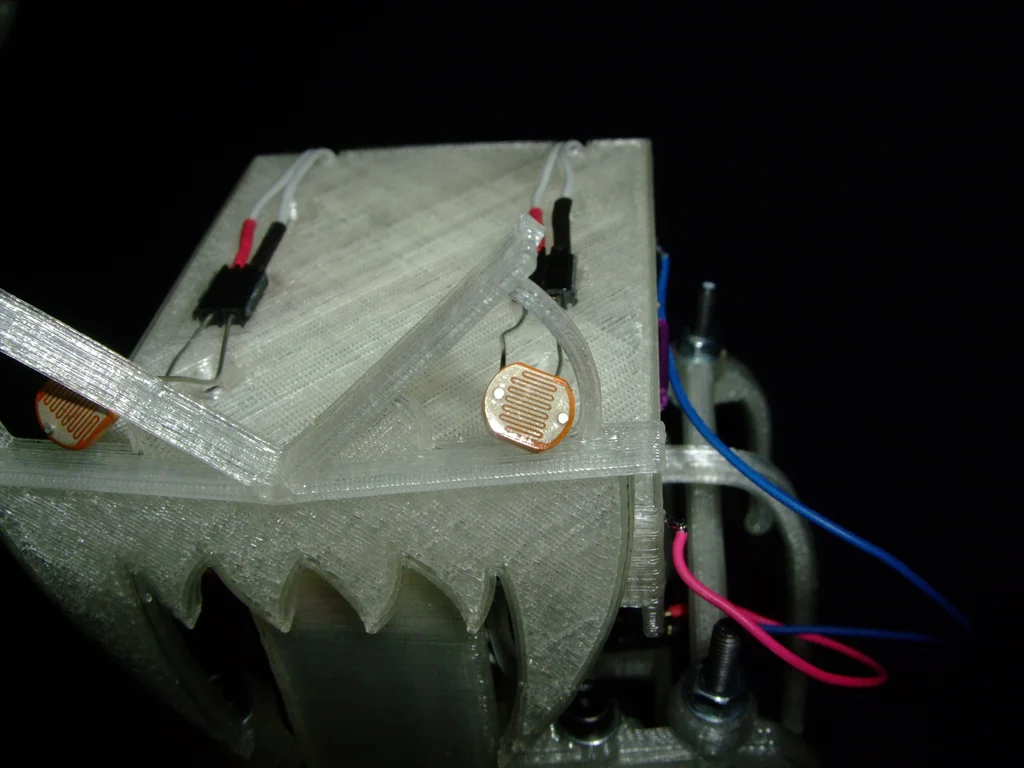
The connection is very simple , You can check the attached architecture (LDR Connect ). Can be 2 LDR Fixed on the top of the Hexapod , To provide as much light as possible .
If you light a lamp in front of your hexapod , It will start to increase its speed . If you point the light to the left LDR, It will turn left . If you point the light to the right lDR, It will turn right . If you cover LDR, The Hexapod displacement table will stop .
You can see a monster head in the image :)
This “ Mask ” Is based on https://www.thingiverse.com/thing:4412
The first 6 Step : Use Nunchuk Drive your hexapod
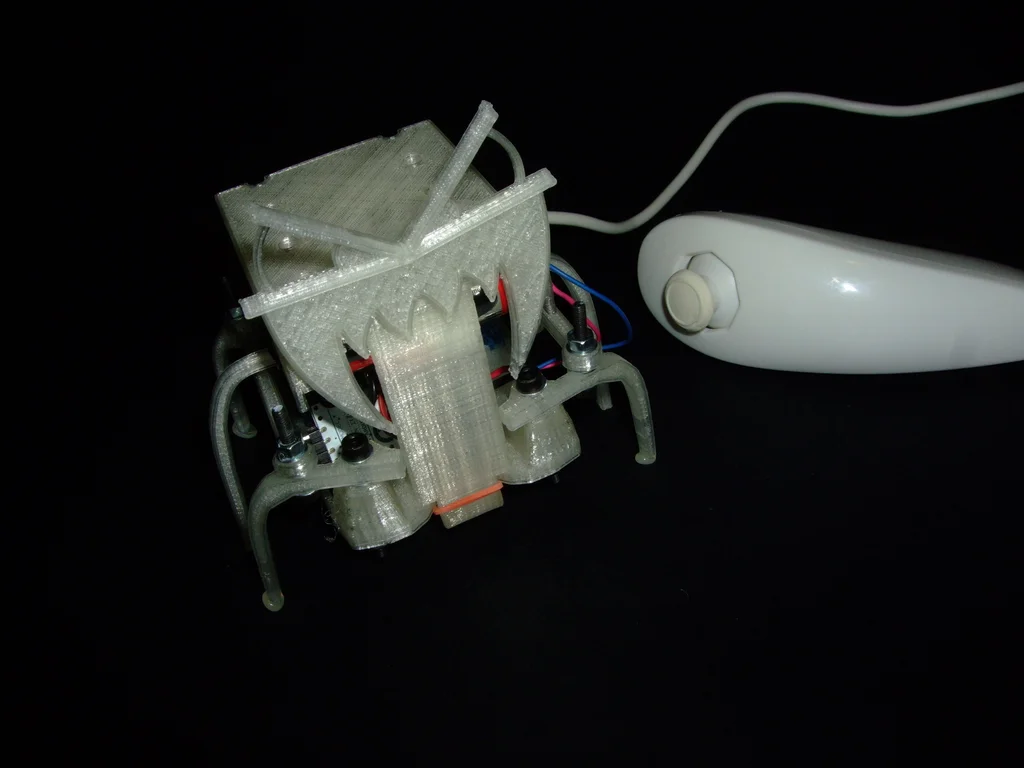

For this step , You need to :
- 1x nunchuk
- 1x nunchuk Adapter ( You can buy or buy from old / The damaged wiimote Remove )
- 1x 10K resistance
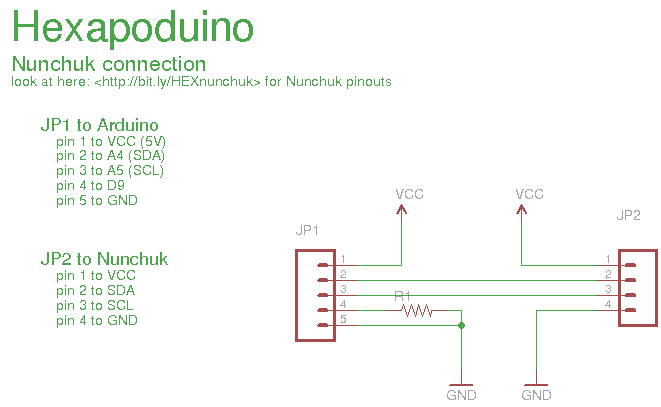
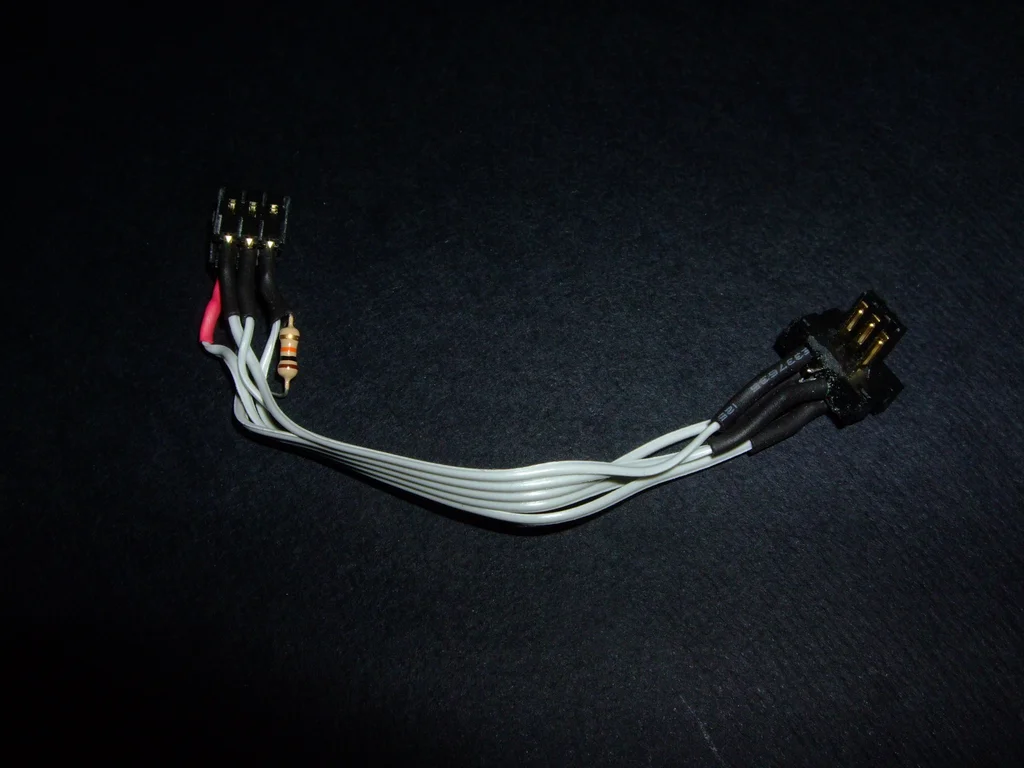
The connection is very simple , You can view The attached architecture (Nunchuk Connect ).
I reused an old and damaged WiiMote The connectors .Arduino Use GND And pins D9 Between 10K Resistance comes “ notice ” There is one Nunchuk Connect ( If you look at skcteh, You can understand how !). You can use Nunchuk At the top of the Joystick Drive your Hexapod .C Button Increase the speed ,Z Button Reduce speed
The first 7 Step : Drive your... Via Bluetooth Hexapod!
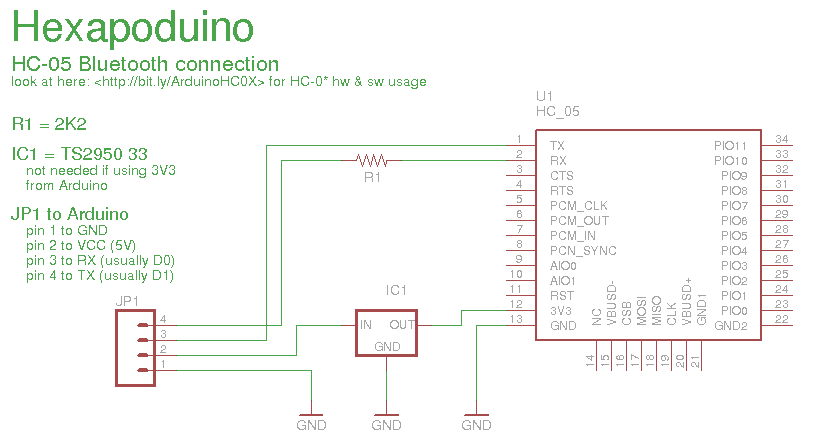
For this step , You need to :
- 1x HC-05( Or compatible ) Bluetooth module
- 1x 2K2 resistor
- 1x TS2950 33( Or compatible ) pressure regulator
To understand what is HC-05 Bluetooth module , And how it works , You can check my guide about 1 It was published in Arduino Forum :http:
//forum.arduino.cc/index.php?topic=104903.0
Yes 3 Major parts :
- Hardware connection
- AT Programming
- bt serial communication .
The problem is that the guide is Italian Of :) But there are many pictures and codes .
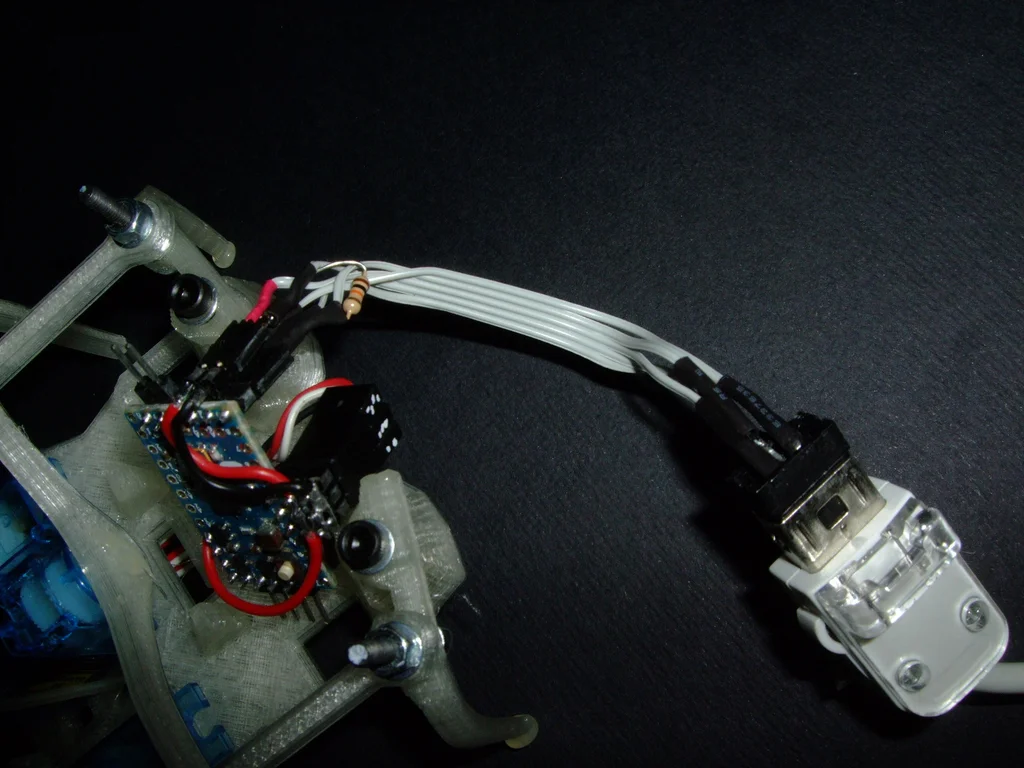
in any case , The connection is simple , You can view Additional architecture (HC-05 Connect ). You need this module as Slave Work , also UART Speed is bps 38400.
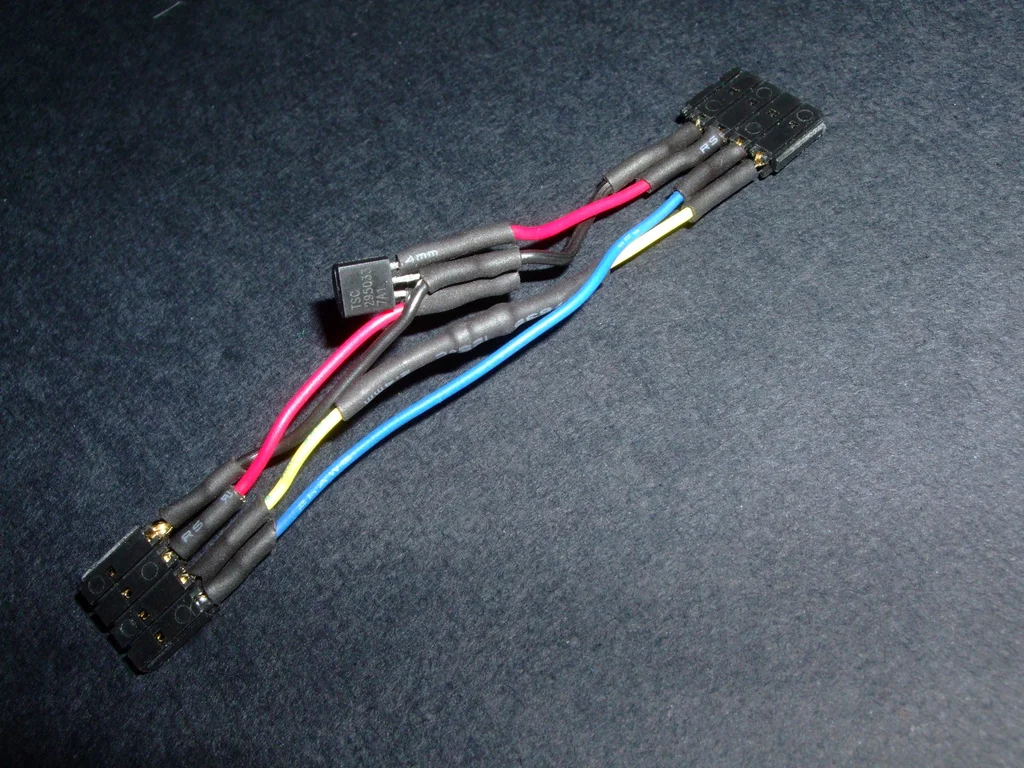
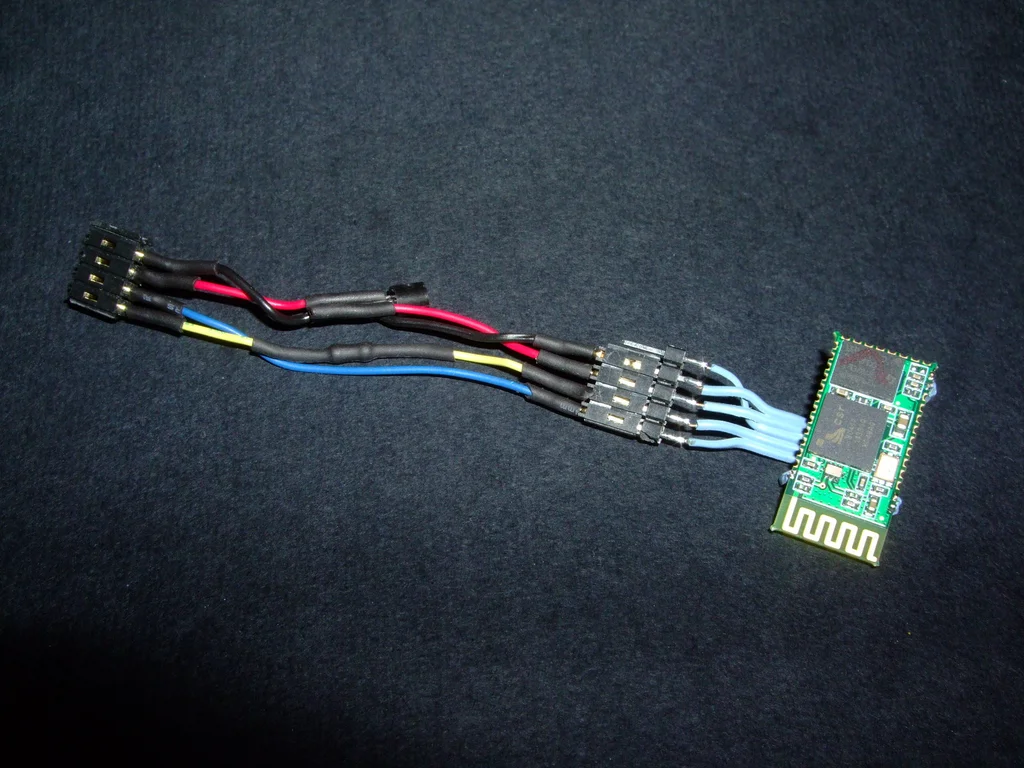
I made one according to the connection described in the architecture ** The connector .** I can put BT The module is connected to one end , take Arduino Mini Connect the connector on the to the other end .
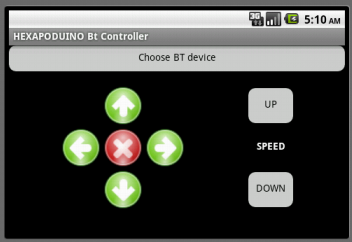
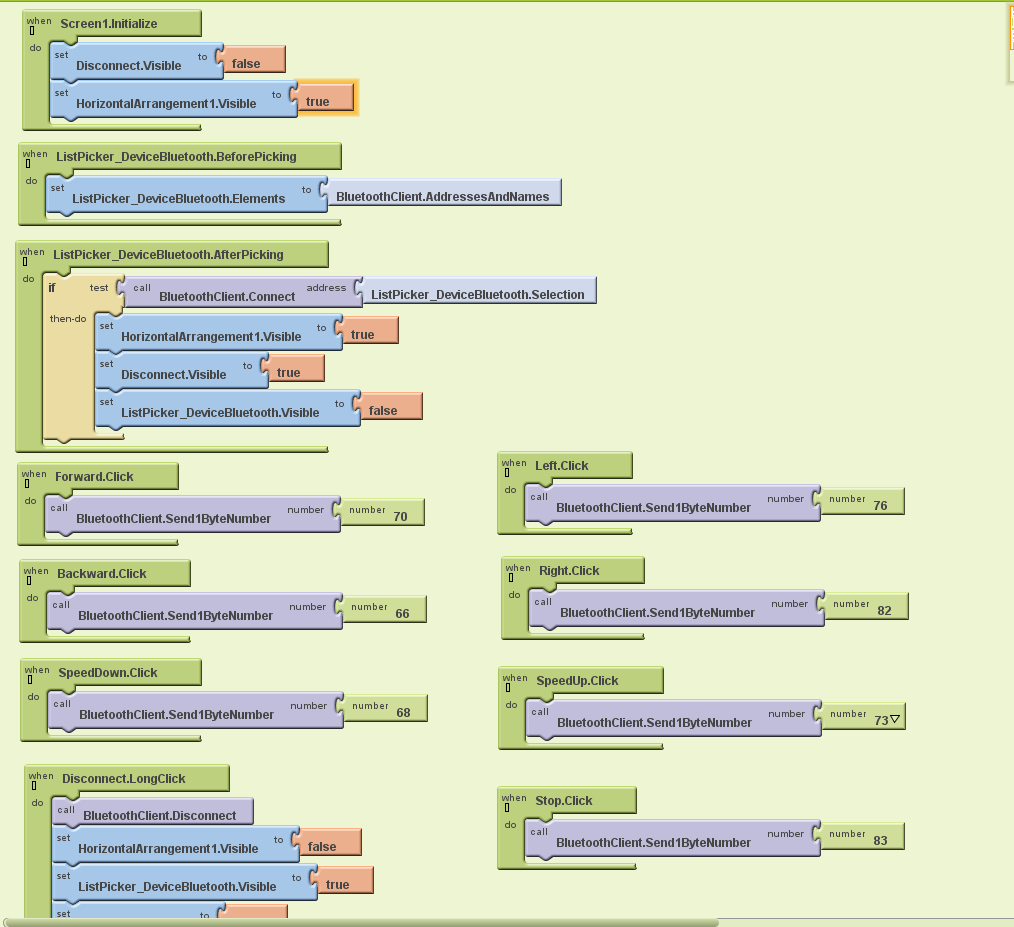
I developed one in Android < 4.2 Simple applications running on .
I use the AppInventor:http /beta.appinventor.mit.edu/, This is a very special and simple development environment , from MIT maintain !
I attached the image of the front end here ( Run in the simulator here ) And the back end 2 Images ( You can also see code block programming !).
I also attach The source of the application : You need a AppInventor account ( free ) To upload and use it !
The attachment
[ Failed to transfer the external chain picture , The origin station may have anti-theft chain mechanism , It is suggested to save the pictures and upload them directly (img-RfOqX2H3-1656990732690)(https://content.instructables.com/static/image/file.default.gif)]HEXAPODUINO.zip
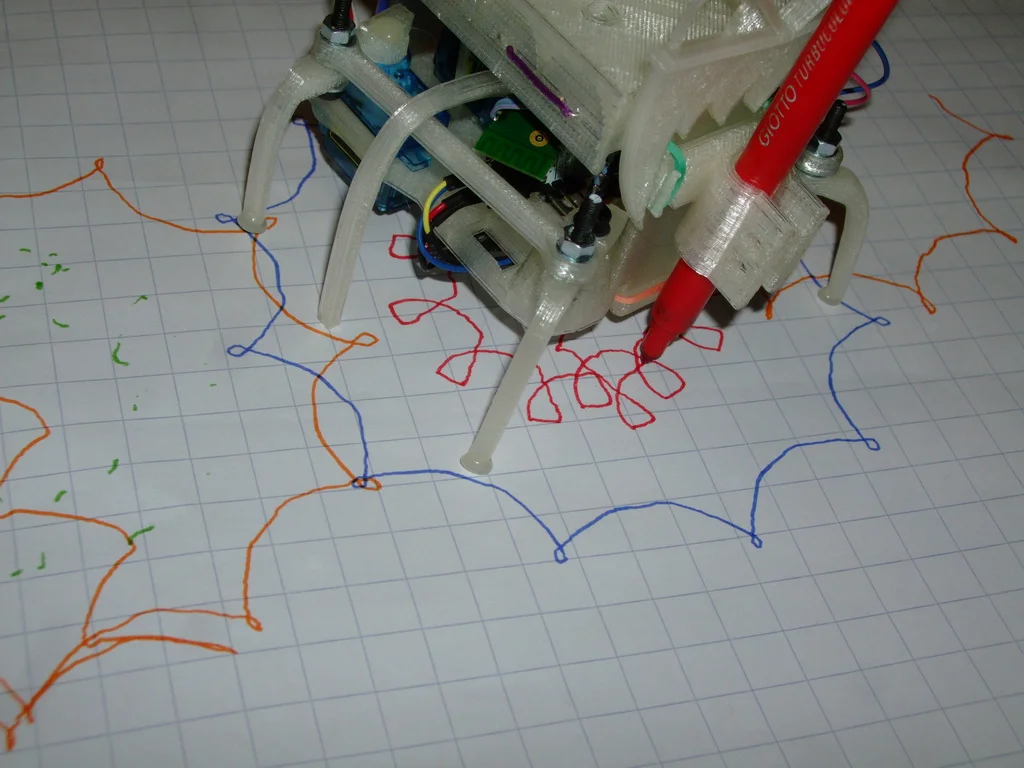
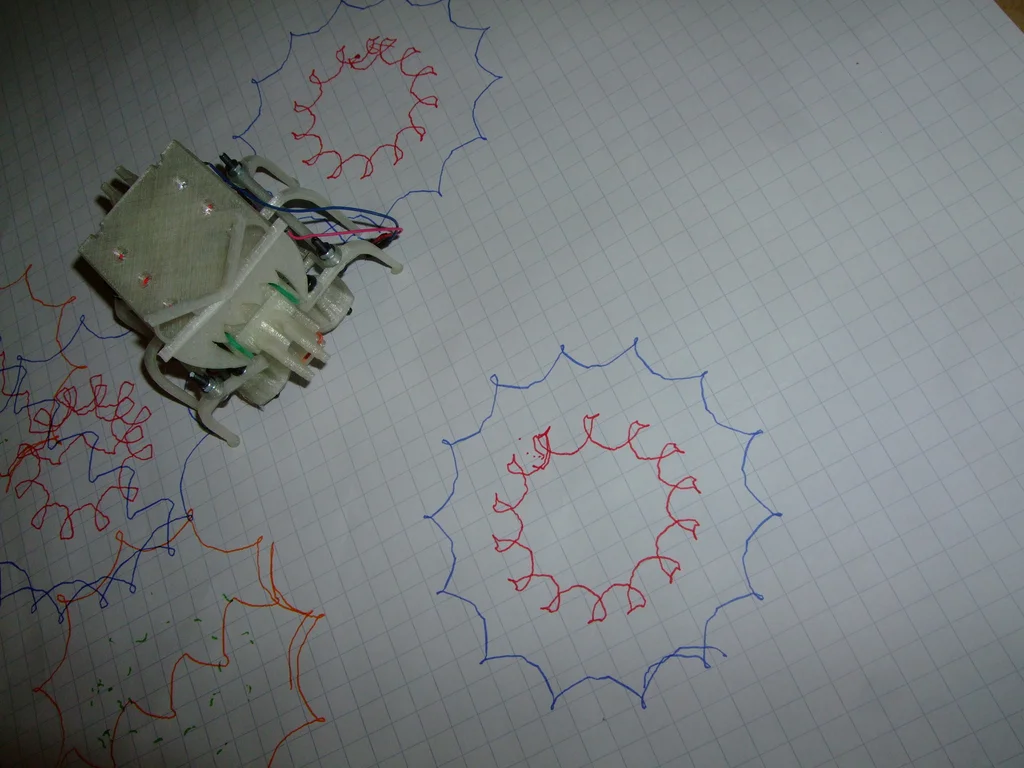
The first 8 Step : Hexapod painting !
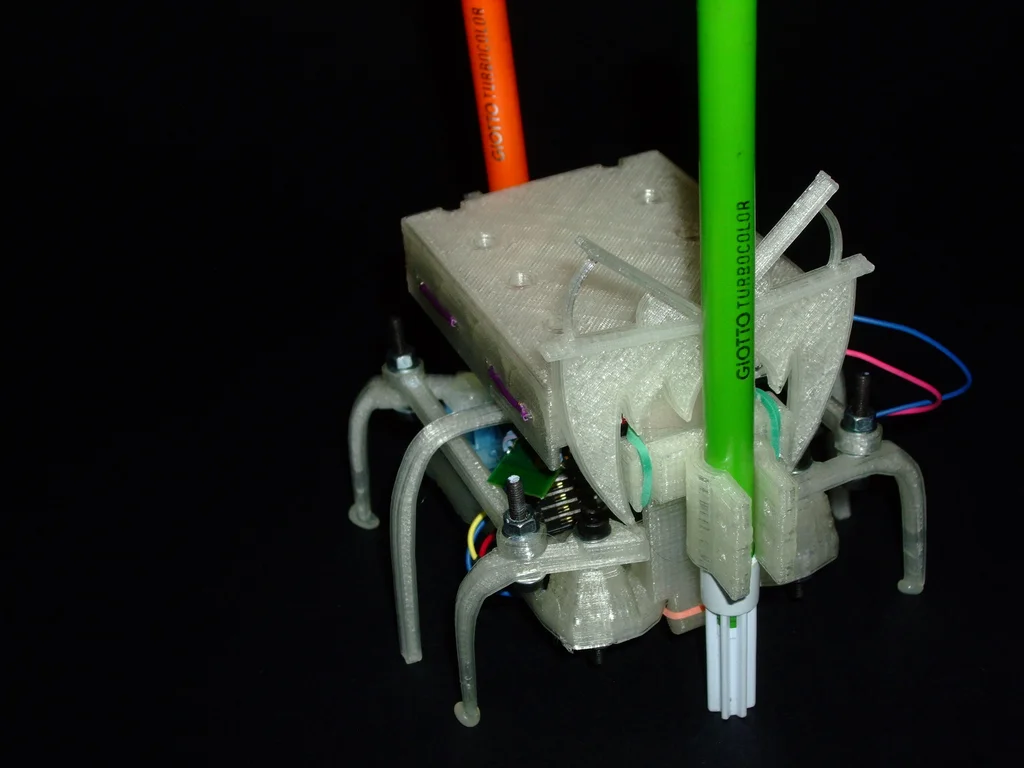
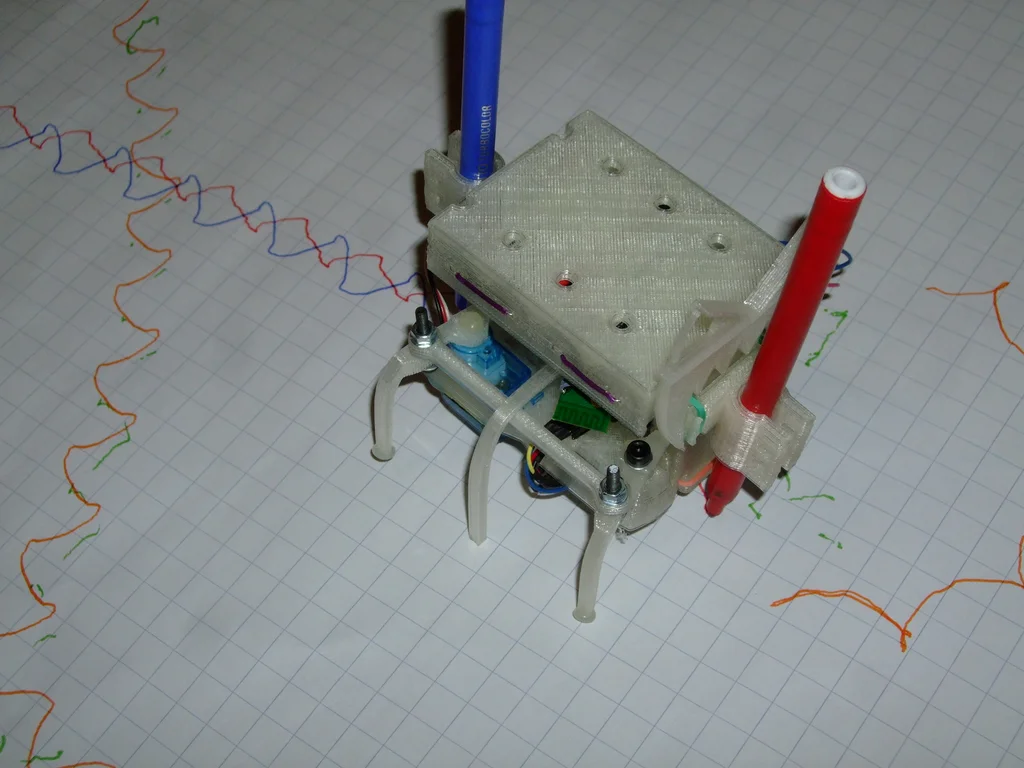
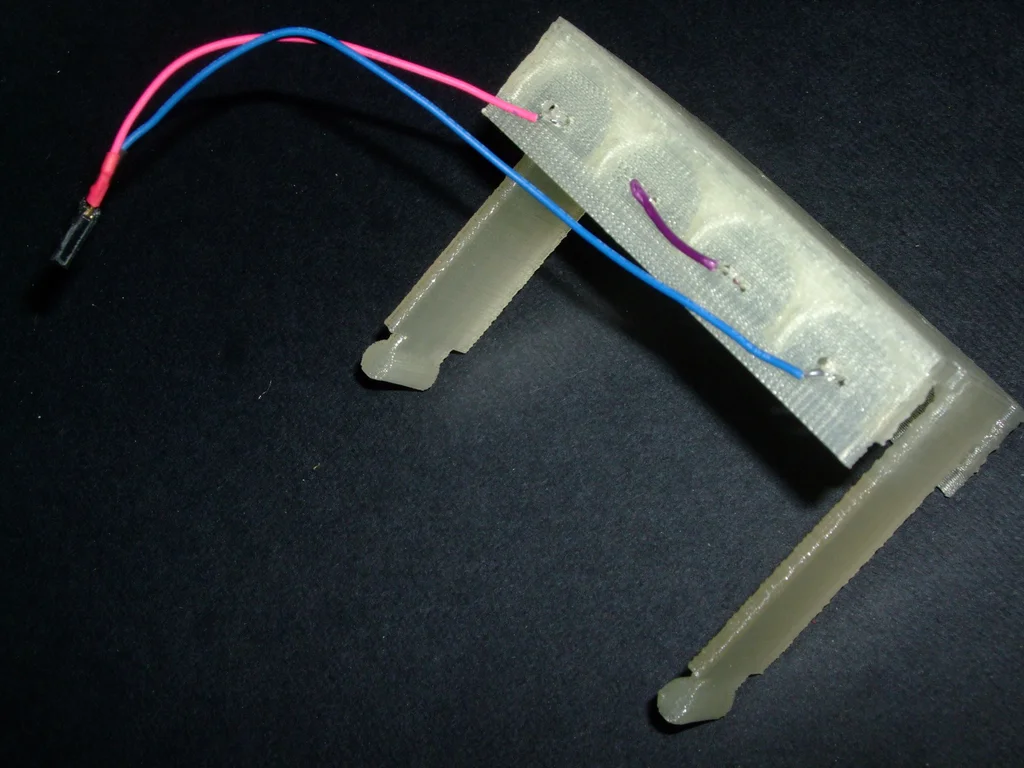
For this last step , You need to Penholder .
These pen holders are ( Designed by me ) Perfectly installed on the bracket of the battery rack .
http://www.thingiverse.com/thing:110331
You can fix them with rubber . Then you just need to install 1 the ( front ) or 2 Pen ( Before and after ), Let the Hexapod move freely , Move and rotate again . Hexapod movement is swinging , So the drawing is very special !
Here's a video :
http /www.youtube.com/watch?v=dJFALt1IaJI
More photos and videos are available at my g+ Gallery Find :http :
//bit.ly/HexapodUP
I am already in Arduino Contest and Remote Control Contest This tutorial is entered in .
If you like this article , Please vote !
Principle analysis of hexapod bionic robot
One research objective
Human desire for outer space exploration has never stopped , therefore , How to do without endangering human life , Select the explorers of the advance force , It's worth pondering . In recent years, there have been many discussions on the application of biped to multi legged robots in outer space , In the past, biped robots were mostly transformed into mechanical systems , Its motion is limited to two-dimensional plane , Unable to overcome the rugged terrain of many mountainous areas . The hexapod robot has the ability to cross obstacles , Can overcome rugged terrain , And robots can withstand harsh working environments better than humans , Therefore, it can be used in many dangerous jobs , For example, the study of volcanoes or the exploration of other planets .
In foreign countries, many scholars have discussed the design and improvement of mobile robots . The general mobile robot can be divided into wheel shape 、 Foot shape . In terms of foot shape mobile, it is divided into two legs 、 Four legs 、 Hexapod and multi legged robots , In addition, there are snake shaped mobile robots .
Whether at rest or walking , The movement of the hexapod robot is more flexible , But its walking control needs good control and Planning , Hexapod robots are less restricted by terrain , But moving around is a powerful tool to explore the unknown environment , It is also a good research topic .
Two The overall scheme of the system
Hexapod bionic robot is divided into robot module and wireless remote control module . Their composition block diagram is shown in the figure below . Both modules are based on PIC32 Single chip microcomputer is the control core , By means of 2.8 " TFT The button control robot is simulated on the screen to realize various functions .

chart 1、 Hexapod robot module

chart 2、 Wireless remote control module
3、 ... and Hardware design
3.1 Gait research of robot
a. Forward gait ( The black ellipse means the foot should be on the bottom , The hollow ellipse represents landing )


chart 3、 The initial state chart 4、 The three feet of the first group are raised


chart 5、 The first group moves three feet forward chart 6、 The second group raises three feet


chart 7、 The three feet of the first group use the ground chart 8、 The three feet of the second group hit the ground
Friction will move the body forward , The three feet of the second group move forward

chart 9、 The three feet in the second group use the ground friction to move the body forward , The three feet of the first group move forward , Then from the figure 4
Start repeating , Realize the forward and backward gait of the robot .
Be careful : In order to make the robot move in a straight line , The forward distance of each foot must be the same .
b. Turning gait

chart 10、 The initial state chart 11、 The three feet of the first group are raised

chart 12、 The three feet of the first group turn and step chart 13、 The three feet of the first group use friction against the ground
On the ground , Then the three feet of the second group are lifted Force makes the robot turn a certain angle , The three legs of the second group turn at a certain angle

chart 14、 The three feet of the first group are raised , chart 15、 The three feet of the second group use the ground
The three feet of the second group hit the ground The friction of makes the robot turn a certain angle , The first group Of the three Turn one foot at an angle

chart 16、 The three feet of the second group are raised , Three of the first group
One foot on the ground , Then from the figure 13 Start repeating
Be careful : The maximum angle of each turn of the structure is 30 degree , The minimum angle of turning is 1 degree . So the turning angle can be set through the program 1 To 255 Any turn of degrees .
边栏推荐
- lvgl 显示图片示例
- Bubble sort, insert sort
- 超越PaLM!北大碩士提出DiVeRSe,全面刷新NLP推理排行榜
- Value series solution report
- Data communication foundation OSPF Foundation
- 【 note 】 résoudre l'erreur de code IDE golang
- Array sorting num ranking merge in ascending order
- [brief notes] solve the problem of IDE golang code red and error reporting
- Au - delà du PARM! La maîtrise de l'Université de Pékin propose diverse pour actualiser complètement le classement du raisonnement du NLP
- 如何将 DevSecOps 引入企业?
猜你喜欢
No one consults when doing research and does not communicate with students. UNC assistant professor has a two-year history of teaching struggle
swiper. JS to achieve barrage effect
Appium automation test foundation - appium basic operation API (I)
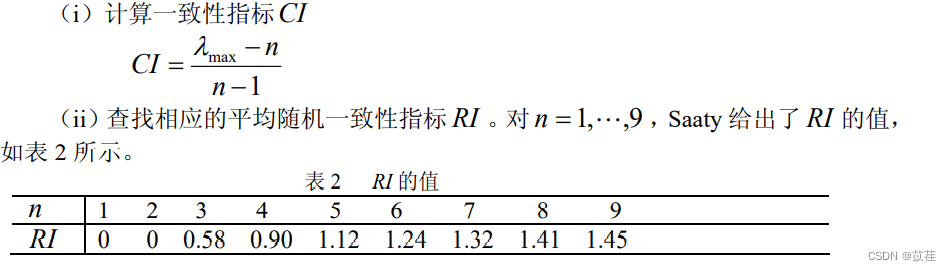
Analytic hierarchy process of mathematical modeling (including Matlab code)
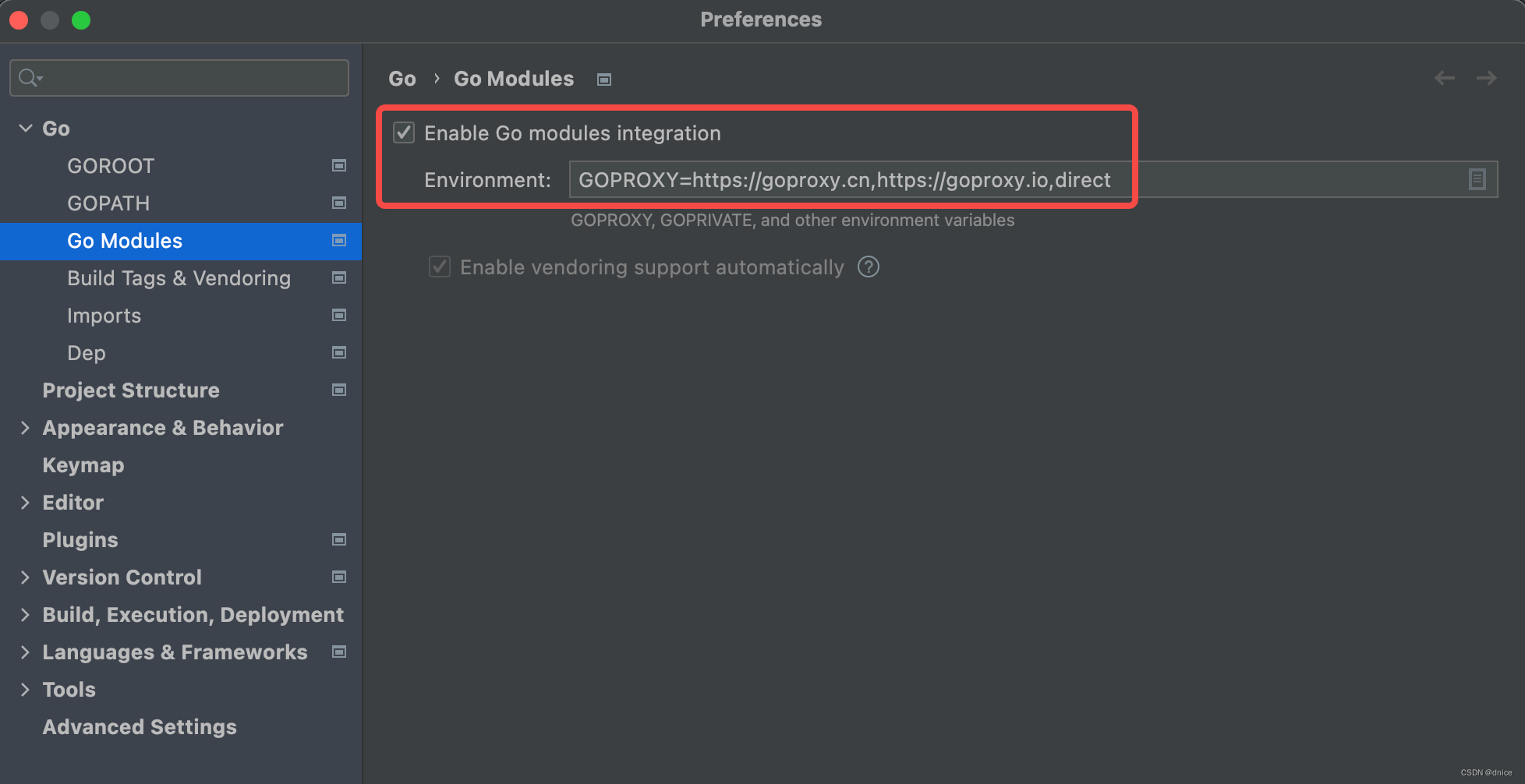
【簡記】解决IDE golang 代碼飄紅報錯

把 ”中台“ 的思想迁移到代码中去
![P1451 calculate the number of cells / 1329: [example 8.2] cells](/img/c4/c62f3464608dbd6cf776c2cd7f07f3.png)
P1451 calculate the number of cells / 1329: [example 8.2] cells

Common MySQL interview questions

lvgl 显示图片示例
![1330: [example 8.3] minimum steps](/img/69/9cb13ac4f47979b498fa2254894ed1.gif)
1330: [example 8.3] minimum steps
随机推荐
Maximum common subsequence
Go language programming specification combing summary
Transfer the idea of "Zhongtai" to the code
Noi / 1.5 06: element maximum span value of integer sequence
Data communication foundation NAT network address translation
SQL Server learning notes
The computer is busy, and the update is a little slow
Au - delà du PARM! La maîtrise de l'Université de Pékin propose diverse pour actualiser complètement le classement du raisonnement du NLP
Detailed explanation of QT creator breakpoint debugger
ICML 2022 | explore the best architecture and training method of language model
I include of spring and Autumn
Huiyuan, 30, is going to have a new owner
Bugku's Ping
Ctfshow web entry information collection
Redis' transaction mechanism
ICML 2022 | 探索语言模型的最佳架构和训练方法
MySQL表字段调整
How can the boss choose programmers to help me with development?
Good article inventory
Write a go program with vscode in one article