当前位置:网站首页>Semantic slam source code analysis
Semantic slam source code analysis
2022-07-07 19:54:00 【Blue feather birds】
Corresponding github: https://github.com/floatlazer/semantic_slam
This meaning SLAM The mapping is based on ROS Of
Here is the source code analysis :
First of all, from the semantic_cloud.py set out , Here the camera reads topic, You'll get RGB And depth maps ,
At the same time orb_slam2 Calculate the pose , We won't discuss it here orb_slam2 Algorithm details , That's another big story .
node: semantic_cloud:
point_type = PointType.SEMANTICS_MAX
self.mean = np.array([104.00699, 116.66877, 122.67892]边栏推荐
- PMP對工作有益嗎?怎麼選擇靠譜平臺讓備考更省心省力!!!
- Research and practice of super-resolution technology in the field of real-time audio and video
- 杰理之关于 TWS 声道配置【篇】
- R language dplyr package select function, group_ The by function, filter function and do function obtain the third largest value of a specific numerical data column in a specified level in a specified
- 8 CAS
- 2022.07.02
- R语言dplyr包select函数、group_by函数、filter函数和do函数获取dataframe中指定因子变量中指定水平中特定数值数据列的值第三大的值
- Redis——基本使用(key、String、List、Set 、Zset 、Hash、Geo、Bitmap、Hyperloglog、事务 )
- R语言ggplot2可视化:使用ggpubr包的ggdensity函数可视化分组密度图、使用stat_overlay_normal_density函数为每个分组的密度图叠加正太分布曲线
- openEuler 有奖捉虫活动,来参与一下?
猜你喜欢

el-upload上传组件的动态添加;el-upload动态上传文件;el-upload区分文件是哪个组件上传的。
Dynamic addition of El upload upload component; El upload dynamically uploads files; El upload distinguishes which component uploads the file.

Make insurance more "safe"! Kirin Xin'an one cloud multi-core cloud desktop won the bid of China Life Insurance, helping the innovation and development of financial and insurance information technolog

openEuler 有奖捉虫活动,来参与一下?
Welcome to the markdown editor
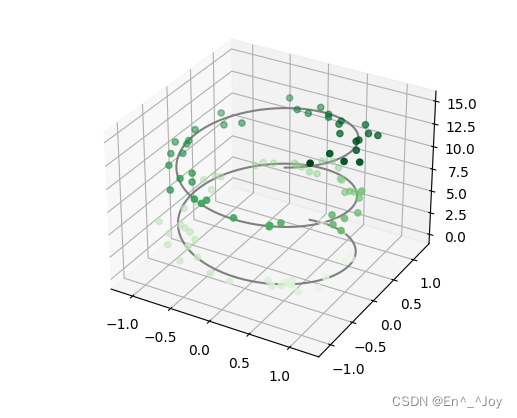
Matplotlib drawing 3D graphics
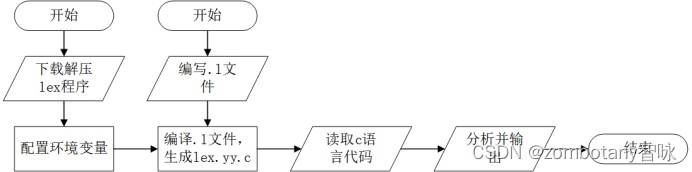
Experiment 1 of Compilation Principle: automatic implementation of lexical analyzer (Lex lexical analysis)
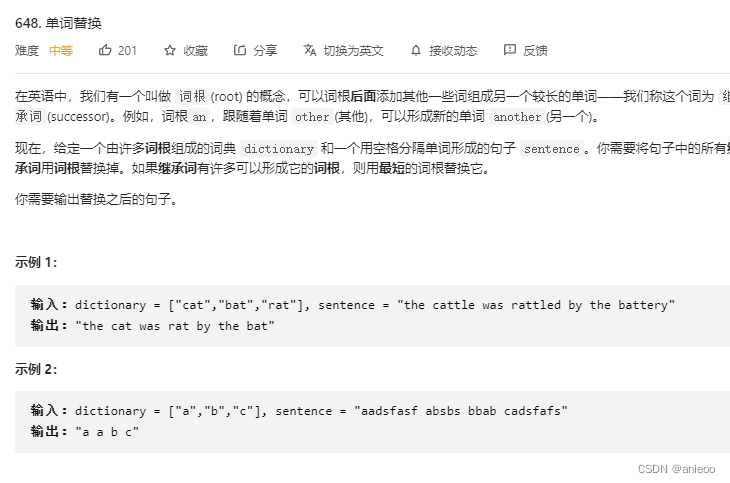
648. 单词替换
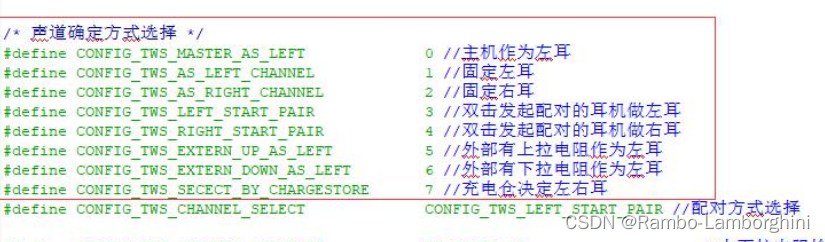
杰理之关于 TWS 声道配置【篇】
2022.07.05
随机推荐
Mysql, sqlserver Oracle database connection mode
ASP. Net gymnasium integrated member management system source code, free sharing
Chief technology officer of Pasqual: analog quantum computing takes the lead in bringing quantum advantages to industry
What does "true" mean
Time tools
IP tools
A pot of stew, a collection of common commands of NPM and yarn cnpm
tp6 实现佣金排行榜
Dynamic addition of El upload upload component; El upload dynamically uploads files; El upload distinguishes which component uploads the file.
ASP. Net kindergarten chain management system source code
Solve the error reporting problem of rosdep
【RT-Thread env 工具安装】
编译器优化那些事儿(4):归纳变量
ASP.NET体育馆综合会员管理系统源码,免费分享
8 CAS
LeetCode 535(C#)
爬虫实战(七):爬王者英雄图片
微信公众号OAuth2.0授权登录并显示用户信息
论文解读(ValidUtil)《Rethinking the Setting of Semi-supervised Learning on Graphs》
Kirin Xin'an joins Ningxia commercial cipher Association