当前位置:网站首页>机械臂速成小指南(十一):坐标系的标准命名
机械臂速成小指南(十一):坐标系的标准命名
2022-07-07 18:14:00 【躺躺我啊】
指南目录:
机械臂速成小指南(十一):坐标系的标准命名
********************以下为正文********************
为了规范描述机械臂与操作对象之间的位姿关系,我们需要给机械臂和工作空间专门命名和确定专门的“标准”坐标系。下图所示的五个坐标系就是本章需要进行命名的坐标系。这五个坐标系的命名以及随后在机械臂的编程和控制系统中的应用都以简单易懂的特点提供了一种通用性。所有机械臂的运动都将按照这些坐标系描述。
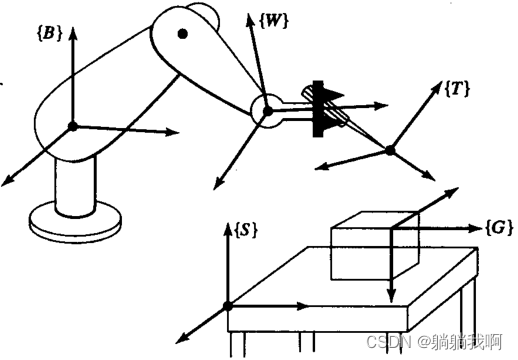
1.基坐标系{B}
基坐标系{B}位于操作臂的基座上。它仅是赋予坐标系{0}的另一个名称。因为它固连在机械臂的静止部位,所以有时称为连杆0。
2.工作台坐标系{S}
工作台坐标系{S}的位置与任务相关。如下图所示,它位于机械臂工作台的一个角上。对机械臂系统的用户来说,工作台坐标系{S}是一个通用坐标系,机械臂所有的运动都是相对于它来执行的。有时称它为任务坐标系、世界坐标系或通用坐标系。工作台坐标系通常根据基坐标系确定,即BT。
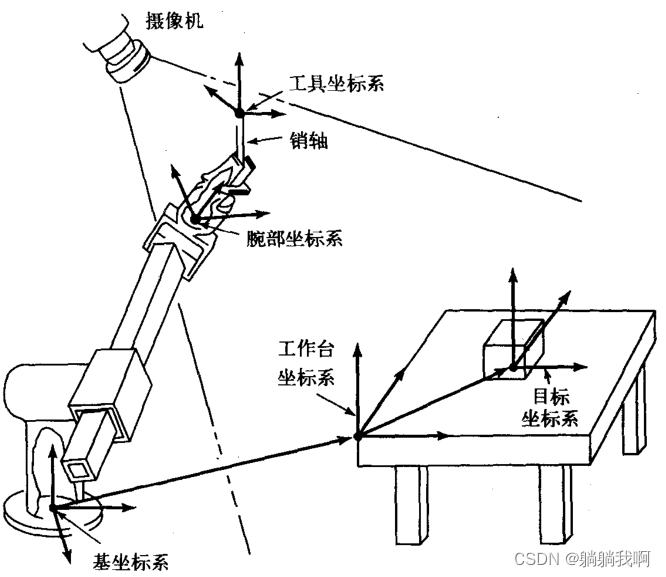
3.目标坐标系{G}
目标坐标系{G}是机械臂移动工具时对工具位置的描述。特指在机械臂运动结束时,工具坐标系应当与目标坐标系重合。目标坐标系{G}通常根据工作台坐标系来确定。在上图中,目标坐标系位于将要插入销轴的轴孔处。一般来说,所有机械臂的运动都可以按照这些坐标系描述,它们为描述机械臂的操作提供了标准。
4.工作坐标系{T}
工具坐标系{T}附于机械臂所夹持工具的末端。当机械臂的手部没有夹持工具时,工具坐标系{T}的原点位于机械臂的指端之间。工具坐标系通常根据腕部坐标系来确定。在上图中,工具坐标系的原点定义在机械臂夹爪销轴的末端。
5.腕部坐标系{W}
腕部坐标系{W}附于机械臂的末端连杆。这个固连在机械臂末端连杆上的坐标系也可以称为坐标系{N}。大多数情况,腕部坐标系{W}的原点位于机械臂手腕上,它随着机械臂的末端连杆移动。它相对于基坐标系定义,即
边栏推荐
- Force buckle 459 Duplicate substring
- 一. 基础概念
- Open source heavy ware! Chapter 9 the open source project of ylarn causal learning of Yunji datacanvas company will be released soon!
- CSDN语法说明
- Graduation season | regretful and lucky graduation season
- 第二十章 使用工作队列管理器(三)
- Get webkitformboundary post login
- 【STL】vector
- Cloud 组件发展升级
- When easygbs cascades, how to solve the streaming failure and screen jam caused by the restart of the superior platform?
猜你喜欢

随机推荐
AIRIOT助力城市管廊工程,智慧物联守护城市生命线
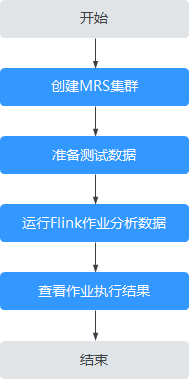
MRS离线数据分析:通过Flink作业处理OBS数据
Try the tuiroom of Tencent cloud (there is an appointment in the evening, which will be continued...)
Detailed explanation of Flink parallelism and slot
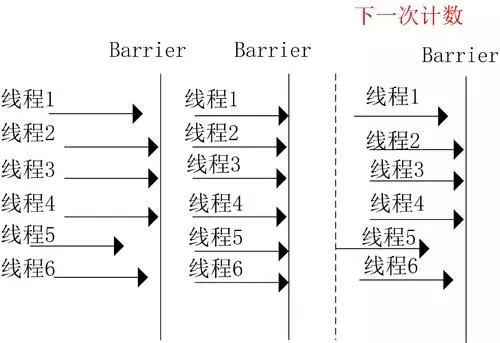
How to cooperate among multiple threads
Jenkins 用户权限管理
取两个集合的交集
Sword finger offer II 013 Sum of two-dimensional submatrix
VMWare中虚拟机网络配置
搞定带WebKitFormBoundary post登录
Read PG in data warehouse in one article_ stat
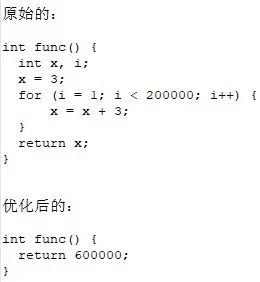
sql 常用优化
整型int的拼接和拆分
MSE API学习
MIT science and technology review article: AgI hype around Gato and other models may make people ignore the really important issues
JVM class loading mechanism
开发那些事儿:Go加C.free释放内存,编译报错是什么原因?
备份 TiDB 集群到持久卷
基于深度学习的目标检测的更新迭代总结(持续更新ing)
Boot 和 Cloud 的版本选型