当前位置:网站首页>【UVM】我的 main_phase 都跑完了,为啥 case 无法退出?太不讲道理!
【UVM】我的 main_phase 都跑完了,为啥 case 无法退出?太不讲道理!
2022-06-29 00:38:00 【MangoPapa】
边栏推荐
- be based on. NETCORE development blog project starblog - (13) add friendship link function
- FATAL ERROR: Could not find ./ bin/my_ print_ Solutions to defaults
- ES6:let、const、箭头函数
- If you can play these four we media operation tools, the sideline income of 6000+ is very easy
- 矩 阵 压 缩
- mysql 8.0以上报2058 解决方式
- Reference materials in the process of using Excel
- Document management.
- Bug risk level
- FATAL ERROR: Could not find ./bin/my_print_defaults的解决办法
猜你喜欢

10、YOLO系列

Realization of beauty system with MATLAB
MapReduce case

Comparison between winding process and lamination process

Difference between applying for trademark in the name of individual and company

Xiaobai's e-commerce business is very important to choose the right mall system!

【LeetCode】21. Merge two ordered linked lists - go language solution
![[image registration] improved SAR image registration based on sar-sift with matlab code](/img/69/4e78c6cef45b2e4d133222a4372e43.jpg)
[image registration] improved SAR image registration based on sar-sift with matlab code

WPF implementation calls local camera~
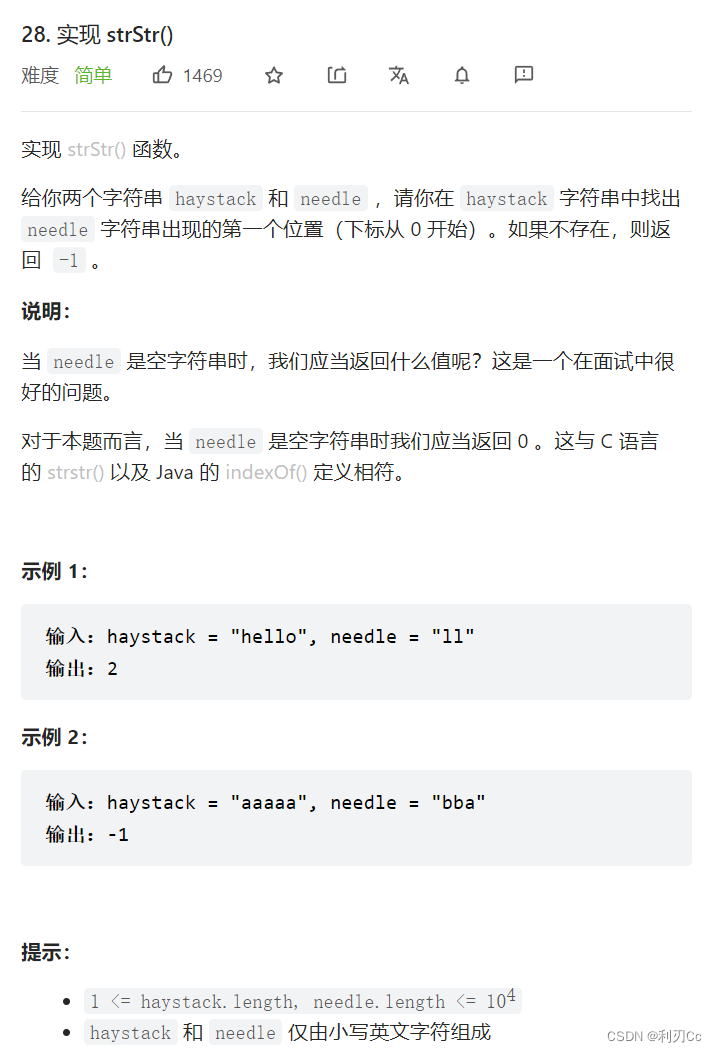
Leetcode daily question: implementing strstr()
随机推荐
What is redis
be based on. NETCORE development blog project starblog - (13) add friendship link function
每日一题:消失的数字
Typescript-- section 4: Functions
[image registration] SAR image registration based on particle swarm optimization Improved SIFT with matlab code
[Gym 102423]-Elven Efficiency | 思维
Daily question 1: the number of numbers in the array
Encapsulation of JDBC connection and disconnection database
Bug risk level
机器视觉系统的配件及工作过程
12. object detection mask RCNN
scp拷贝文件夹
旋转接头安装使用注意事项
How to guarantee the delivery quality through the cloud effect test plan
Jbridge bridging frame technology for AI computing power landing
pinhole camera model
[200 opencv routines] 101 adaptive median filter
卷绕工艺与叠片工艺的对比
Redis常用命令手册
Accessories and working process of machine vision system