当前位置:网站首页>BigVision代码
BigVision代码
2022-07-03 03:06:00 【AphilGuo】
classifier
#ifndef CLASSIFIER_H
#define CLASSIFIER_H
#include<opencv2/opencv.hpp>
#include<opencv2/dnn.hpp>
#include<iostream>
#include<fstream>
#include<vector>
#include<opencv2/core/utils/logger.hpp>
#include <QString>
#include <QByteArray>
using namespace cv;
using namespace std;
class ONNXClassifier{
public:
ONNXClassifier(const string& model_path, Size input_size);
void Classifier(const Mat& input_image, string& out_name, double& confidence);
private:
void preprocess_input(Mat& image);
bool read_labels(const string& label_path);
private:
Size input_size;
cv::dnn::Net net;
cv::Scalar default_mean;
cv::Scalar default_std;
string m_labels[2]= {
"ant", "bee"};
};
#endif // CLASSIFIER_H
mianwindow.h
#ifndef MAINWINDOW_H
#define MAINWINDOW_H
#include <QMainWindow>
#include <QLabel>
#include <opencv2/opencv.hpp>
using namespace cv;
namespace Ui {
class MainWindow;
}
class MainWindow : public QMainWindow
{
Q_OBJECT
public:
explicit MainWindow(QWidget *parent = 0);
QImage MatToImage(Mat &m);
~MainWindow();
private slots:
void on_OpenImageButton_clicked();
void on_ResizeImageButton_clicked();
void on_ViewOriImageButton_clicked();
void on_GrayImaageButton_clicked();
void on_GaussionFiltterButton_clicked();
void on_BilateralFiltterButton_clicked();
void on_ErodeButton_clicked();
void on_DilateButton_clicked();
void on_ThreshButton_clicked();
void on_CannyDetectButton_clicked();
void on_ClassifierButton_clicked();
void on_ModelButton_clicked();
void on_ObjPushButton_clicked();
private:
Ui::MainWindow *ui;
Mat m_mat;
Mat* temp;
QLabel* pic;
Mat mid_mat;
QString modelPath;
String m_model;
};
#endif // MAINWINDOW_H
yolov3.h
#ifndef YOLOV3_H
#define YOLOV3_H
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
class YOLOV3
{
public:
YOLOV3(){
}
void InitModel(string weightFile);
void detectImg(Mat& img);
void drawImg(int classId, float confidence, int left, int top, int right, int bottom, Mat& img);
private:
string classes[80] = {
"person", "bicycle", "car", "motorbike", "aeroplane", "bus",
"train", "truck", "boat", "traffic light", "fire hydrant",
"stop sign", "parking meter", "bench", "bird", "cat", "dog",
"horse", "sheep", "cow", "elephant", "bear", "zebra", "giraffe",
"backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee",
"skis", "snowboard", "sports ball", "kite", "baseball bat",
"baseball glove", "skateboard", "surfboard", "tennis racket",
"bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl",
"banana", "apple", "sandwich", "orange", "broccoli", "carrot",
"hot dog", "pizza", "donut", "cake", "chair", "sofa", "pottedplant",
"bed", "diningtable", "toilet", "tvmonitor", "laptop", "mouse",
"remote", "keyboard", "cell phone", "microwave", "oven", "toaster",
"sink", "refrigerator", "book", "clock", "vase", "scissors",
"teddy bear", "hair drier", "toothbrush"
};
int inWidth = 416;
int inHeight = 416;
float confThreshold = 0.5;
float nmsThreshold = 0.5;
float objThreshold = 0.5;
vector<int> blob_size{
1, 3, 416, 416};
Mat blob = Mat(blob_size, CV_32FC1, Scalar(0, 0, 0));
vector<int> classids;
vector<int> indexes;
vector<float> confidences;
vector<Rect> boxes;
vector<Mat> outs;
dnn::Net net;
};
#endif // YOLOV3_H
main.cpp
#include "mainwindow.h"
#include <QApplication>
int main(int argc, char *argv[])
{
QApplication a(argc, argv);
MainWindow w;
w.show();
return a.exec();
}
main.window.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"
#include <QFileDialog>
#include <QDir>
#include<QDebug>
#include <QPixmap>
#include <QByteArray>
#include <QMessageBox>
#include <classifier.h>
#include "yolov3.h"
MainWindow::MainWindow(QWidget *parent) :
QMainWindow(parent),
ui(new Ui::MainWindow)
{
ui->setupUi(this);
}
QImage MainWindow::MatToImage(Mat &m)
{
switch(m.type())
{
case CV_8UC1:
{
QImage img((uchar* )m.data, m.cols, m.rows, m.cols*1, QImage::Format_Grayscale8);
return img;
break;
}
case CV_8UC3:
{
QImage img((uchar* )m.data, m.cols, m.rows, m.cols*3, QImage::Format_RGB888);
return img.rgbSwapped();
break;
}
case CV_8UC4:
{
QImage img((uchar* )m.data, m.cols, m.rows, m.cols*4, QImage::Format_ARGB32);
return img;
break;
}
default:
{
QImage img;
return img;
}
}
}
MainWindow::~MainWindow()
{
delete ui;
delete pic;
delete temp;
}
void MainWindow::on_OpenImageButton_clicked()
{
auto strPath = QFileDialog::getOpenFileName(nullptr, "选择图片", QDir::homePath(),
"Images (*.png *.xpm *.jpg)");
pic = new QLabel;
pic->setPixmap(QPixmap(strPath));
ui->ViewImageScrollArea->setWidget(pic);
QByteArray ba;
ba.append(strPath);
m_mat = imread(ba.data());
mid_mat = m_mat.clone();
}
void MainWindow::on_ViewOriImageButton_clicked()
{
temp = &m_mat;
if(temp->empty()){
QMessageBox::warning(nullptr, "警告!", "请选择图片!!!");
return ;
}
QImage temp1 = MatToImage(*temp);
pic->setPixmap(QPixmap::fromImage(temp1));
ui->ViewImageScrollArea->setWidget(pic);
// 在显示原图的同时
mid_mat = m_mat.clone();
}
void MainWindow::on_ResizeImageButton_clicked()
{
Mat* temp2 = &mid_mat;
if((*temp2).empty()){
QMessageBox::warning(nullptr, "警告!", "请选择图片!!!");
return ;
}
Mat dst;
// 添加鼠标滚轮调整参数
cv::resize(*temp2,dst, Size(400, 400));
QImage temp1 = MatToImage(dst);
pic->setPixmap(QPixmap::fromImage(temp1));
ui->ViewImageScrollArea->setWidget(pic);
mid_mat = dst;
}
void MainWindow::on_GrayImaageButton_clicked()
{
Mat* temp2 = &mid_mat;
if((*temp2).empty()){
QMessageBox::warning(nullptr, "警告!", "请选择图片!!!");
return ;
}
Mat gray_img;
if((*temp2).type()==CV_8UC1){
QMessageBox::warning(nullptr, "操作有误", "此时图片为灰度图");
return;
}
cvtColor(*temp2, gray_img, COLOR_BGR2GRAY);
// qDebug()<<gray_img.type();
QImage temp1 = MatToImage(gray_img);
pic->setPixmap(QPixmap::fromImage(temp1));
ui->ViewImageScrollArea->setWidget(pic);
mid_mat = gray_img;
}
void MainWindow::on_GaussionFiltterButton_clicked()
{
/*
对整幅图像进行加权平均,每一个像素都由其本身和领域内的其他
像素值经过加权平均后得到
*/
Mat* temp2 = &mid_mat;
if((*temp2).empty()){
QMessageBox::warning(nullptr, "警告", "请选择图片!!!");
return ;
}
Mat gaussianImg;
cv::GaussianBlur(*temp2, gaussianImg, cv::Size(5, 5), 0, 0);
QImage temp1 = MatToImage(gaussianImg);
pic->setPixmap(QPixmap::fromImage(temp1));
ui->ViewImageScrollArea->setWidget(pic);
mid_mat = gaussianImg;
}
void MainWindow::on_BilateralFiltterButton_clicked()
{
/*
* 空域核、值域核
*/
Mat* temp2 = &mid_mat;
if((*temp2).empty()){
QMessageBox::warning(nullptr, "警告", "请选择图片!!!");
return ;
}
Mat bilateralImg, dst;
cv::bilateralFilter(*temp2, bilateralImg, 15, 100, 3);
Mat kernel = (Mat_<int>(3, 3)<<0, -1, 0, -1, 5, -1, 0, -1, 0);
filter2D(bilateralImg, dst, -1, kernel, Point(-1, -1), 0);
QImage temp1 = MatToImage(dst);
pic->setPixmap(QPixmap::fromImage(temp1));
ui->ViewImageScrollArea->setWidget(pic);
mid_mat = dst;
}
void MainWindow::on_ErodeButton_clicked()
{
Mat* temp2 = &mid_mat;
if((*temp2).empty()){
QMessageBox::warning(nullptr, "警告", "请选择图片!!!");
return ;
}
// 获取结构元素
Mat erodeImg;
Mat structureElement = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(5, 5), Point(-1, -1));
cv::erode(*temp2, erodeImg, structureElement);
QImage temp1 = MatToImage(erodeImg);
pic->setPixmap(QPixmap::fromImage(temp1));
ui->ViewImageScrollArea->setWidget(pic);
mid_mat = erodeImg;
}
void MainWindow::on_DilateButton_clicked()
{
Mat* temp2 = &mid_mat;
if((*temp2).empty()){
QMessageBox::warning(nullptr, "警告", "请选择图片!!!");
return;
}
Mat dilateImg;
Mat structureElement = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(5, 5), Point(-1, -1));
cv::dilate(*temp2, dilateImg, structureElement);
QImage temp1 = MatToImage(dilateImg);
pic->setPixmap(QPixmap::fromImage(temp1));
ui->ViewImageScrollArea->setWidget(pic);
mid_mat = dilateImg;
}
void MainWindow::on_ThreshButton_clicked()
{
Mat* temp2 = &mid_mat;
if((*temp2).empty()){
QMessageBox::warning(nullptr, "警告", "请选择图片!!!");
return ;
}
if(!((*temp2).type()==CV_8UC1)){
QMessageBox::warning(nullptr, "警告", "请先将图片灰度化");
return ;
}
Mat bin_Img;
cv::adaptiveThreshold(*temp2, bin_Img, 255, ADAPTIVE_THRESH_MEAN_C, THRESH_BINARY, 5, 2);
QImage temp1 = MatToImage(bin_Img);
pic->setPixmap(QPixmap::fromImage(temp1));
ui->ViewImageScrollArea->setWidget(pic);
mid_mat = bin_Img;
}
void MainWindow::on_CannyDetectButton_clicked()
{
Mat* temp2 = &mid_mat;
if((*temp2).empty()){
QMessageBox::warning(nullptr, "警告", "请选择图片!!!");
return ;
}
if(!((*temp2).type()==CV_8UC1)){
QMessageBox::warning(nullptr, "警告", "请先将图片灰度化");
return ;
}
Mat cannyImg;
cv::Canny(*temp2, cannyImg, 100, 200, 3, false);
QImage temp1 = MatToImage(cannyImg);
pic->setPixmap(QPixmap::fromImage(temp1));
ui->ViewImageScrollArea->setWidget(pic);
mid_mat = cannyImg;
}
ONNXClassifier::ONNXClassifier(const std::string& model_path, cv::Size _input_size) :default_mean(0.485, 0.456, 0.406),
default_std(0.229, 0.224, 0.225), input_size(_input_size)
{
net = cv::dnn::readNet(model_path);
net.setPreferableBackend(cv::dnn::DNN_BACKEND_OPENCV);
net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU);
}
void ONNXClassifier::preprocess_input(Mat& image){
image.convertTo(image, CV_32F, 1.0/255.0);
cv::subtract(image, default_mean, image);
cv::divide(image, default_std, image);
}
void ONNXClassifier::Classifier(const cv::Mat& input_image, std::string& out_name, double& confidence){
out_name.clear();
cv::Mat image = input_image.clone();
preprocess_input(image);
cv::Mat input_blob = cv::dnn::blobFromImage(image, 1.0, input_size, cv::Scalar(0,0,0), true);
net.setInput(input_blob);
const std::vector<cv::String>& out_names = net.getUnconnectedOutLayersNames();
cv::Mat out_tensor = net.forward(out_names[0]);
cv::Point classNumber;
double classProb;
cv::minMaxLoc(out_tensor, NULL, &classProb, NULL, &classNumber);
confidence = classProb;
out_name = m_labels[classNumber.x];
}
void MainWindow::on_ClassifierButton_clicked()
{
Mat drawImg = mid_mat.clone();
String* using_model = &m_model;
if(drawImg.empty()){
QMessageBox::warning(nullptr, "警告", "请选择图片!!!");
return ;
}
if(using_model->empty()){
QMessageBox::warning(nullptr, "警告", "请选择模型!!!");
return ;
}
Size input_size(300, 300);
ONNXClassifier classifier(*using_model, input_size);
string result;
double confidence = 0;
classifier.Classifier(drawImg, result, confidence);
putText(drawImg, result, Point(20, 20), FONT_HERSHEY_SIMPLEX, 1.0, Scalar(0, 0, 255), 2, 8);
QImage temp1 = MatToImage(drawImg);
pic->setPixmap(QPixmap::fromImage(temp1));
ui->ViewImageScrollArea->setWidget(pic);
mid_mat = drawImg;
}
void MainWindow::on_ModelButton_clicked()
{
modelPath = QFileDialog::getOpenFileName(nullptr, "选择文件", QDir::homePath(), "*.onnx *.weights");
QByteArray ba;
ba.append(modelPath);
m_model = modelPath.toStdString();
QMessageBox::information(nullptr, "提示", "模型加载成功");
}
void MainWindow::on_ObjPushButton_clicked()
{
String* yoloModel = &m_model;
Mat detectImg = mid_mat.clone();
if(detectImg.empty()){
QMessageBox::warning(nullptr, "警告", "请选择图片!!!");
return ;
}
if(yoloModel->empty()){
QMessageBox::warning(nullptr, "警告", "请选择模型!!!");
return ;
}
YOLOV3 yolo;
yolo.InitModel(*yoloModel);
yolo.detectImg(detectImg);
//转换图片类型
QImage temp1 = MatToImage(detectImg);
pic->setPixmap(QPixmap::fromImage(temp1));
ui->ViewImageScrollArea->setWidget(pic);
mid_mat = detectImg;
}
yolov3.cpp
#include "yolov3.h"
RNG rng(12345);
void YOLOV3::InitModel(string weightFile)
{
string configPath = "D:\\Projects\\QtProjects\\GithubProject\\models\\yolov3\\yolov3.cfg";
this->net = cv::dnn::readNetFromDarknet(configPath, weightFile);
net.setPreferableBackend(cv::dnn::DNN_BACKEND_OPENCV);
net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU);
}
void YOLOV3::detectImg(Mat &img)
{
cv::dnn::blobFromImage(img, blob, 1/255.0, Size(this->inWidth, this->inHeight), Scalar::all(0), true, false);
net.setInput(blob);
net.forward(outs, net.getUnconnectedOutLayersNames());
for(size_t i=0; i<outs.size();i++)
{
float* pdata = (float*)outs[i].data;
for(int j=0;j<outs[i].rows;j++, pdata += outs[i].cols)
{
Mat scores = outs[i].row(j).colRange(5, outs[i].cols);
Point classId;
double confidence;
minMaxLoc(scores, 0, &confidence, 0, &classId);
if(confidence>this->confThreshold)
{
int centerX = (int)(pdata[0]*img.cols);
int centerY = (int)(pdata[1]*img.rows);
int width = (int)(pdata[2]*img.cols);
int height = (int)(pdata[3]*img.rows);
int left = centerX - width / 2;
int top = centerY - height / 2;
classids.push_back(classId.x);
confidences.push_back(confidence);
boxes.push_back(Rect(left, top, width, height));
}
}
}
dnn::NMSBoxes(boxes, confidences, this->confThreshold, this->nmsThreshold, this->indexes);
for(size_t i=0;i<indexes.size();i++)
{
int idx = indexes[i];
Rect box = boxes[idx];
this->drawImg(classids[idx], confidences[idx], box.x, box.y, box.x+box.width, box.y+box.height, img);
}
}
void YOLOV3::drawImg(int classId, float confidence, int left, int top, int right, int bottom, Mat &img)
{
Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
rectangle(img, Point(left, top), Point(right, bottom), color, 2);
string label = format("%.2f", confidence);
label = this->classes[classId] + ":" + label;
int baseLine;
Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
top = max(top, labelSize.height);
putText(img, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 0.75, color, 2, 8);
}
边栏推荐
- Force deduction ----- the minimum path cost in the grid
- Joking about Domain Driven Design (III) -- Dilemma
- About HTTP cache control
- Agile certification (professional scrum Master) simulation exercise-2
- Andwhere multiple or query ORM conditions in yii2
- Pytest (6) -fixture (Firmware)
- Spark on yarn resource optimization ideas notes
- Privatization lightweight continuous integration deployment scheme -- 01 environment configuration (Part 2)
- el-tree搜索方法使用
- Le processus de connexion mysql avec docker
猜你喜欢
![ASP. Net core 6 framework unveiling example demonstration [02]: application development based on routing, MVC and grpc](/img/cb/145937a27ef08050a370d5a255215a.jpg)
ASP. Net core 6 framework unveiling example demonstration [02]: application development based on routing, MVC and grpc
ASP. Net core 6 framework unveiling example demonstration [02]: application development based on routing, MVC and grpc

迅雷chrome扩展插件造成服务器返回的数据js解析页面数据异常

MySql实战45讲【事务隔离】

Add automatic model generation function to hade
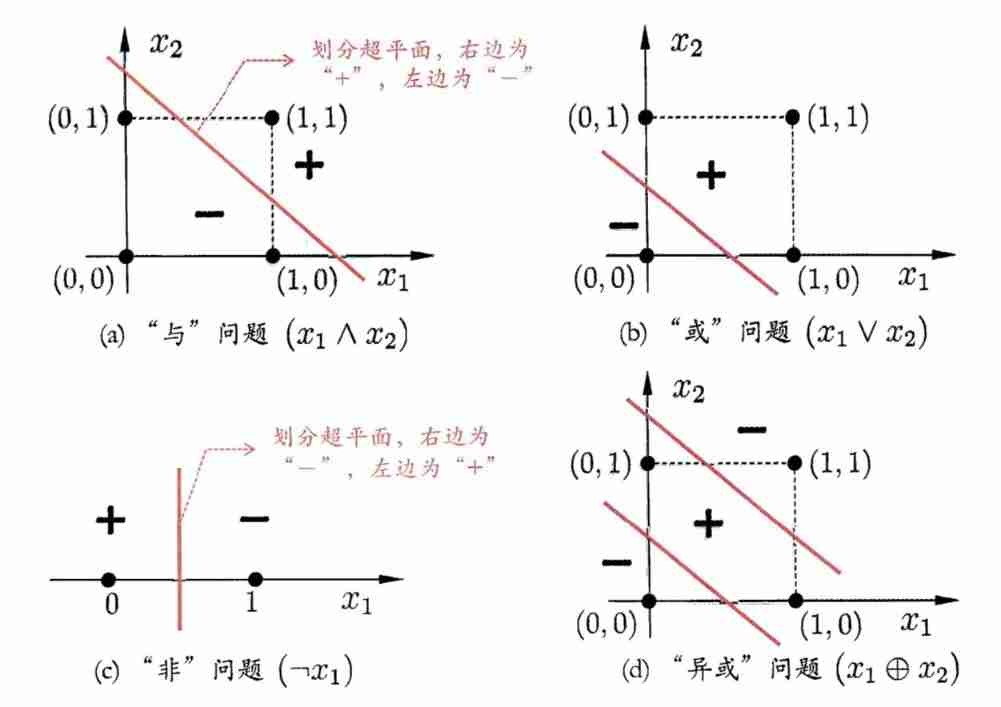
Deep learning: multi-layer perceptron and XOR problem (pytoch Implementation)

I2C 子系统(三):I2C Driver

HW initial preparation
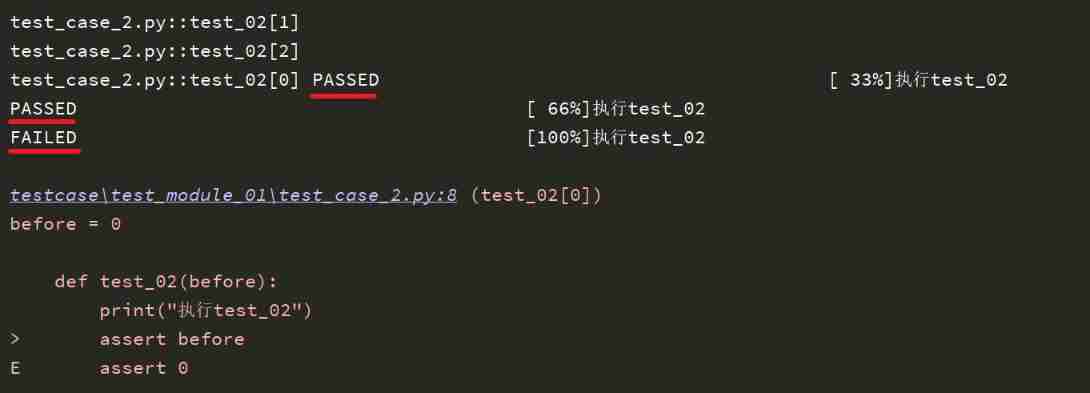
Pytest (6) -fixture (Firmware)
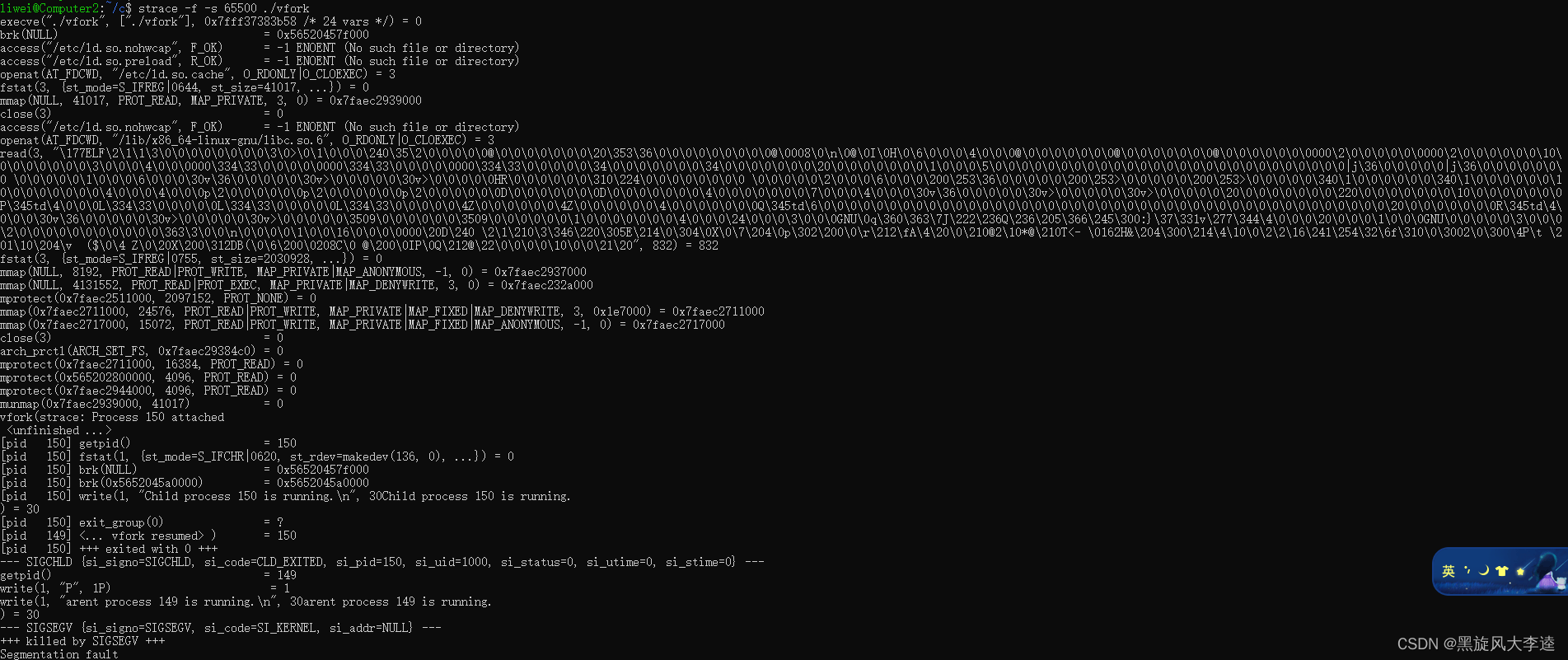
Segmentation fault occurs during VFORK execution
随机推荐
力扣------网格中的最小路径代价
后管中编辑与预览获取表单的值写法
文件重命名
内存泄漏工具VLD安装及使用
How to select the minimum and maximum values of columns in the data table- How to select min and max values of a column in a datatable?
当lambda没有输入时,是何含义?
Edit and preview in the back pipe to get the value writing method of the form
[combinatorics] Application of exponential generating function (multiple set arrangement problem | different balls in different boxes | derivation of exponential generating function of odd / even sequ
Anhui University | small target tracking: large-scale data sets and baselines
Yiwen takes you to know ZigBee
Didi programmers are despised by relatives: an annual salary of 800000 is not as good as two teachers
Source code analysis | resource loading resources
模糊查詢時報錯Parameter index out of range (1 > number of parameters, which is 0)
迅雷chrome扩展插件造成服务器返回的数据js解析页面数据异常
Variable declarations following if statements
C language beginner level - pointer explanation - paoding jieniu chapter
MySql实战45讲【全局锁和表锁】
3D drawing example
Deep learning: multi-layer perceptron and XOR problem (pytoch Implementation)
Sqlserver row to column pivot