当前位置:网站首页>uniCloud 未能获取当前用户信息:30205 | 当前用户为匿名身份
uniCloud 未能获取当前用户信息:30205 | 当前用户为匿名身份
2022-08-02 14:03:00 【星沉大海@T】
最近在使用uniapp云开发,用到了 unicloud-db 组件,但在组件的数据请求却拉不到数据,看接口返回如下错误:未能获取当前用户信息:30205 | 当前用户为匿名身份
然后检查了一遍,排查了dcloud账号,云空间关联,均未发现问题,最后看了下 uniCloud-aliyun/database/diary.schema.json配置发现是 permission 权限配置问题,这里需要根据需要设置增删改查 create/delete/update/read 的权限,true 为开启。
{
"bsonType": "object",
"required": [],
"permission": {
"read": true,
"create": true,
"update": true,
"delete": true
},
"properties": {
"_id": {
"description": "ID,系统自动生成"
}
}
}
边栏推荐
猜你喜欢

【VCU】详解S19文件(S-record)
Unit 5 Hold Status
ROS通信 —— 节点,Nodes & Master](/img/f5/c541259b69a0db3dc15a61e87f0415.png)
[ROS](05)ROS通信 —— 节点,Nodes & Master
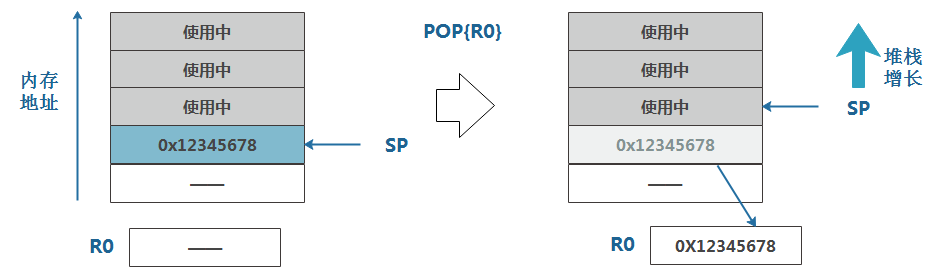
STM32 (F407) - stack
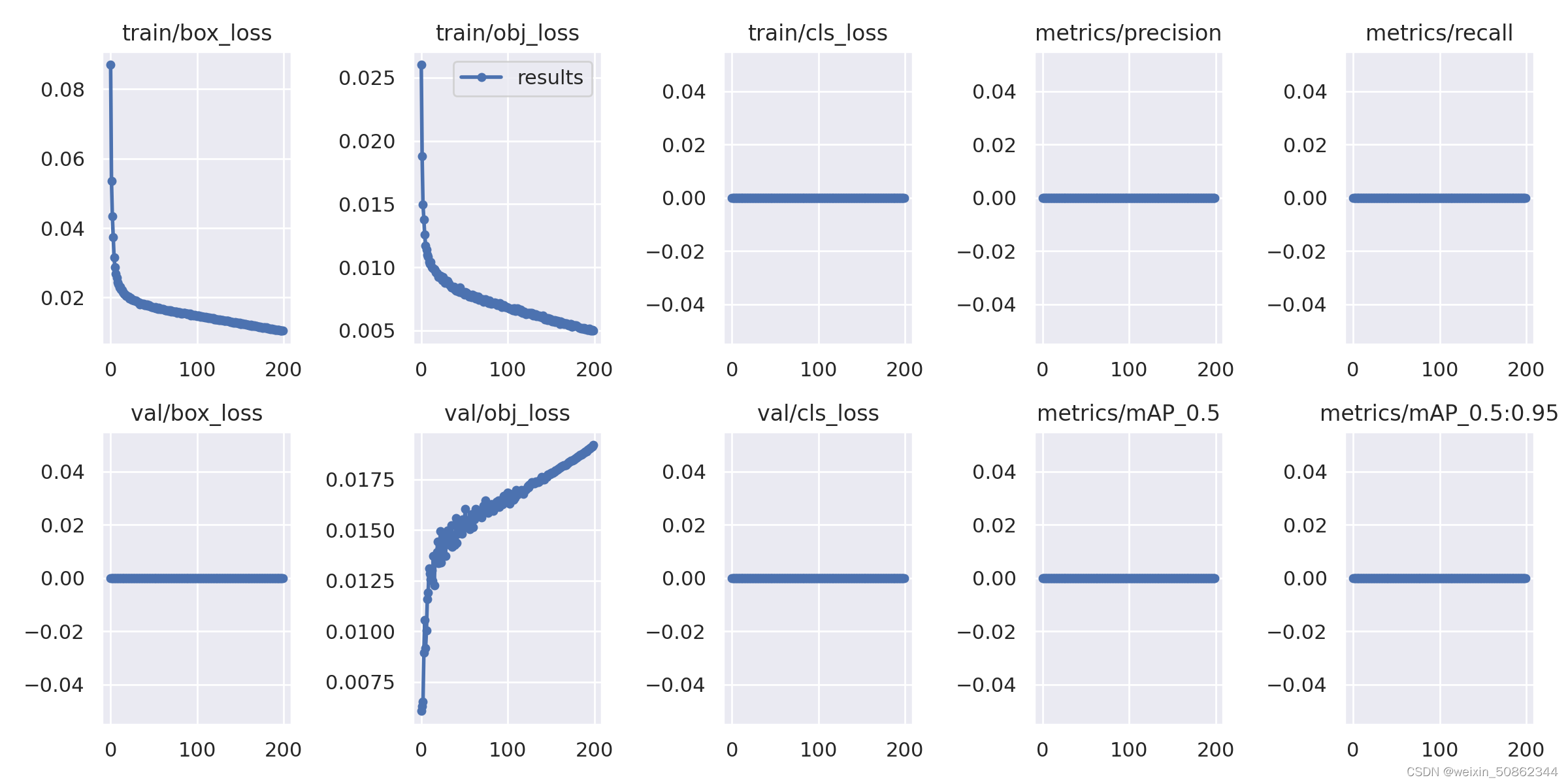
跑yolov5又出啥问题了(1)p,r,map全部为0
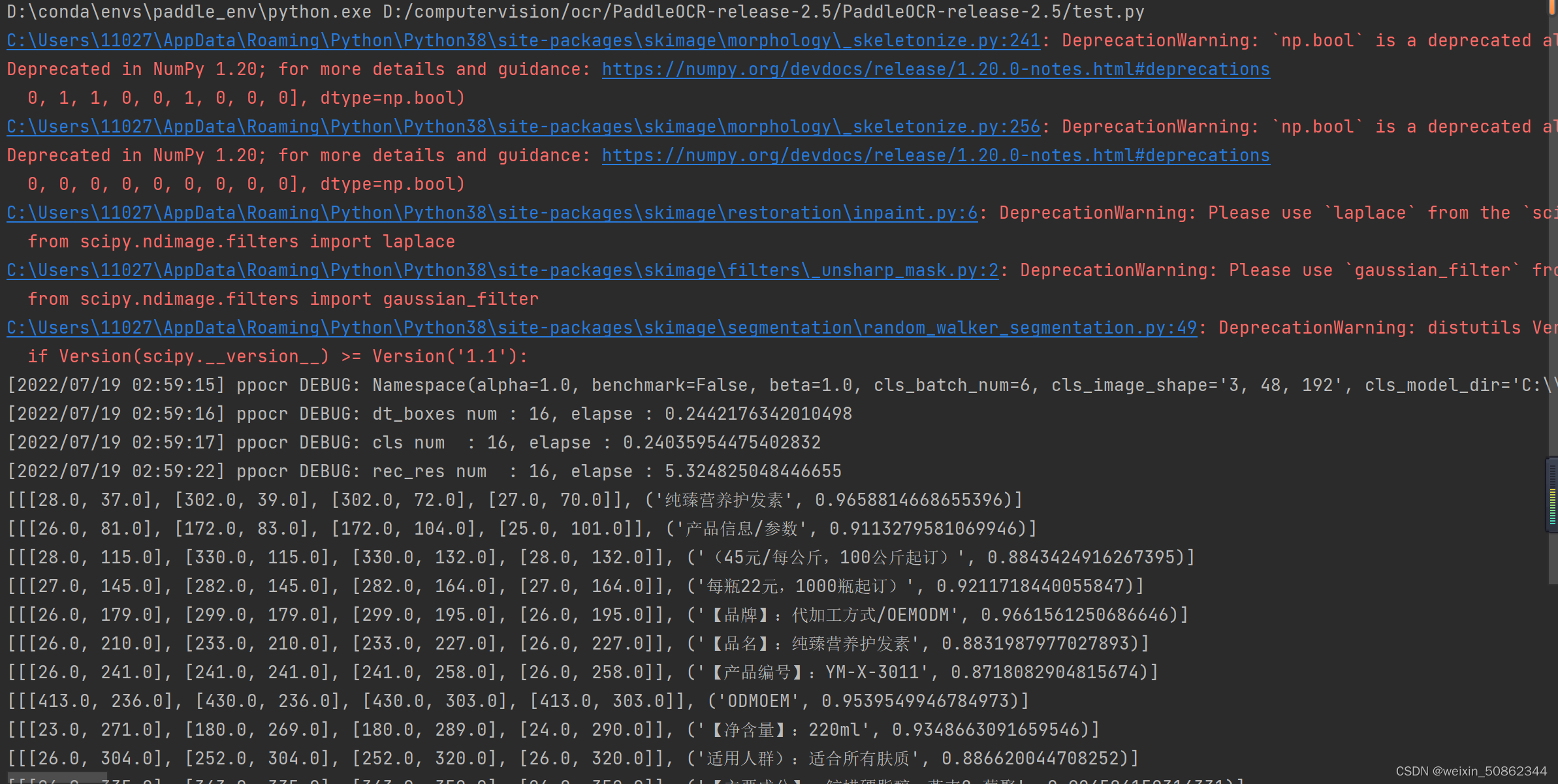
paddleocr window10初体验
【c】大学生在校学习c语言常见代码
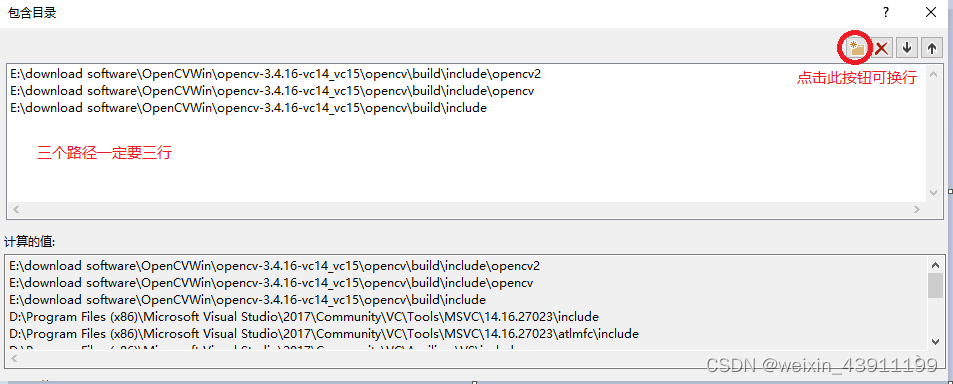
Visual Studio配置OpenCV之后,提示:#include<opencv2/opencv.hpp>无法打开源文件
![[ROS]ROS常用工具介绍(待续)](/img/ea/e390106f750bf697e62a3a296014d2.png)
[ROS]ROS常用工具介绍(待续)
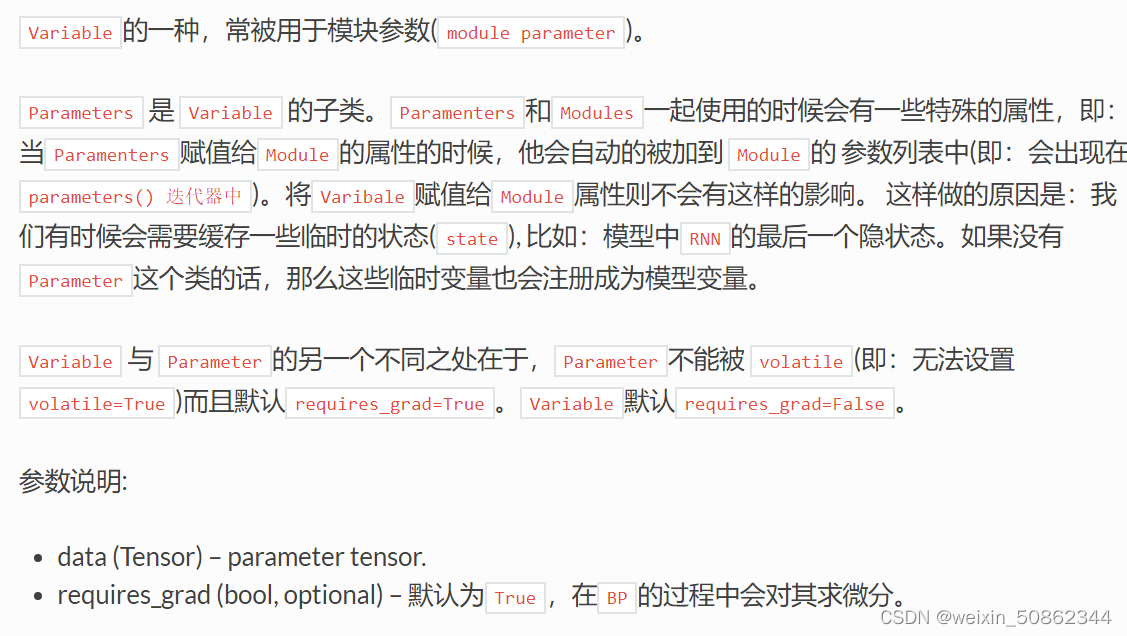
Deep learning framework pytorch rapid development and actual combat chapter4
随机推荐
8580 Merge linked list
Unit 13 Mixing in View Base Classes
Camera Hal(Hal3)层修改Preview流
Basic operations of 8583 sequential stack
(ROS) (03) CMakeLists. TXT, rounding
Flask contexts, blueprints and Flask-RESTful
重新学习编程day1 【初始c语言】【c语言编写出计算两个数之和的代码】
c语言三子棋详解!!! (电脑智能下棋)(附上完整代码)
8583 顺序栈的基本操作
C语言日记 7 输入/输出格式控制
Creating seven NiuYun Flask project complete and let cloud
The IDEA of packaged jar package
Flask-RESTful请求响应与SQLAlchemy基础
The specific operation process of cloud GPU (Hengyuan cloud) training
C语言初级—常见问题(100~200素数,计算1+11+111+...,从键盘获取一个数并输出有几个位)
MarkDown syntax summary
鼠标右键菜单栏太长如何减少
Chapter6 visualization (don't want to see the version)
C语言sizeof和strlen的区别
Unit 11 Serializers