当前位置:网站首页>CVPR 2022 最佳论文候选 | PIP: 6个惯性传感器实现全身动捕和受力估计
CVPR 2022 最佳论文候选 | PIP: 6个惯性传感器实现全身动捕和受力估计
2022-07-06 19:44:00 【智源社区】

项目主页:https://xinyu-yi.github.io/PIP/
论文链接:https://arxiv.org/abs/2203.08528
开源代码:https://github.com/Xinyu-Yi/PIP
边栏推荐
- 【Swift】学习笔记(一)——熟知 基础数据类型,编码风格,元组,主张
- Shell 编程基础
- Leetcode 77: combination
- MySQL is an optimization artifact to improve the efficiency of massive data query
- wzoi 1~200
- mos管实现主副电源自动切换电路,并且“零”压降,静态电流20uA
- Nuggets quantification: obtain data through the history method, and use the same proportional compound weight factor as Sina Finance and snowball. Different from flush
- OC, OD, push-pull explanation of hardware
- PSINS中19维组合导航模块sinsgps详解(时间同步部分)
- Redis入門完整教程:問題定比特與優化
猜你喜欢
Nuggets quantification: obtain data through the history method, and use the same proportional compound weight factor as Sina Finance and snowball. Different from flush
ERROR: Could not find a version that satisfies the requirement xxxxx (from versions: none)解决办法
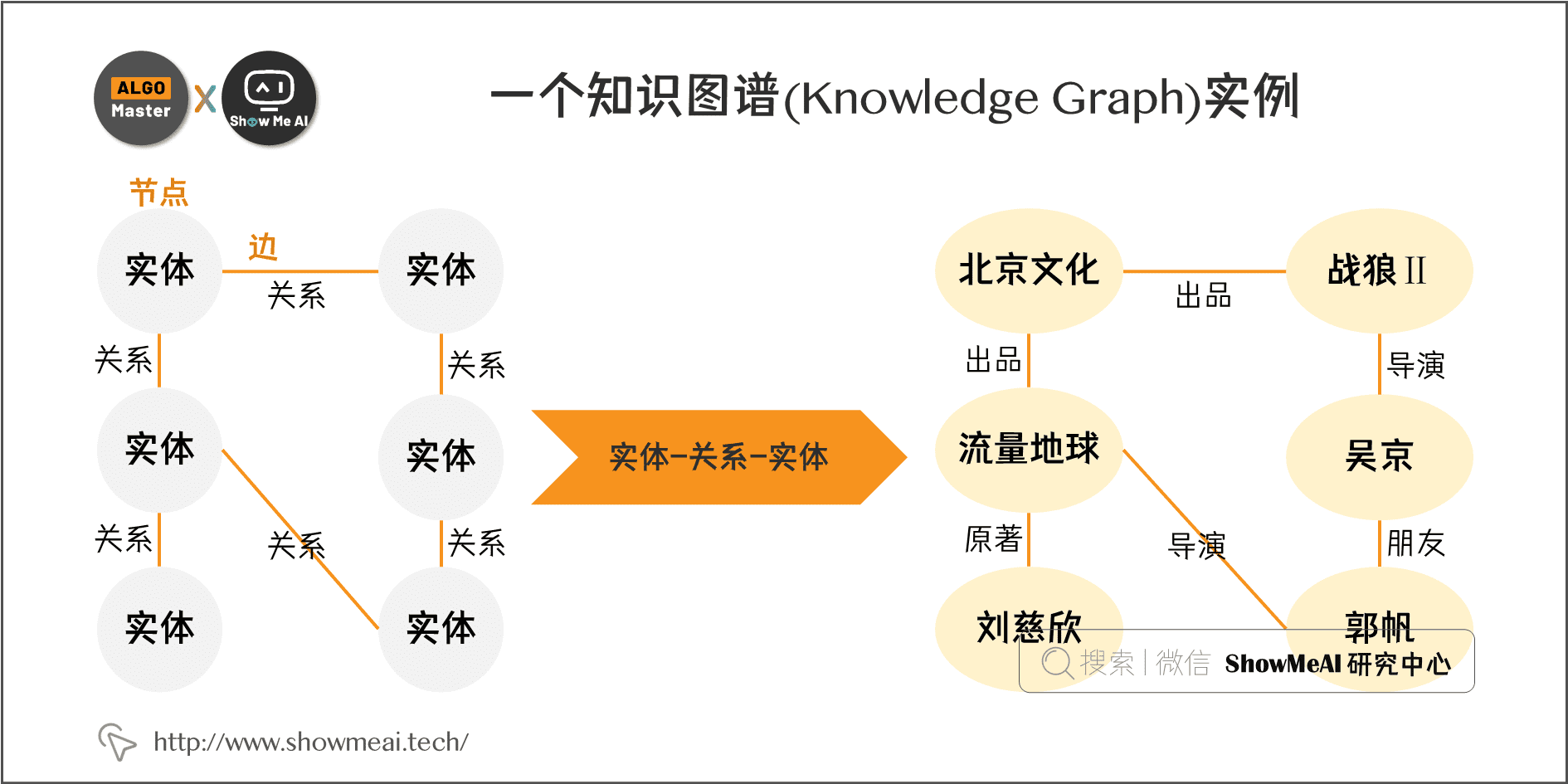
The whole process of knowledge map construction
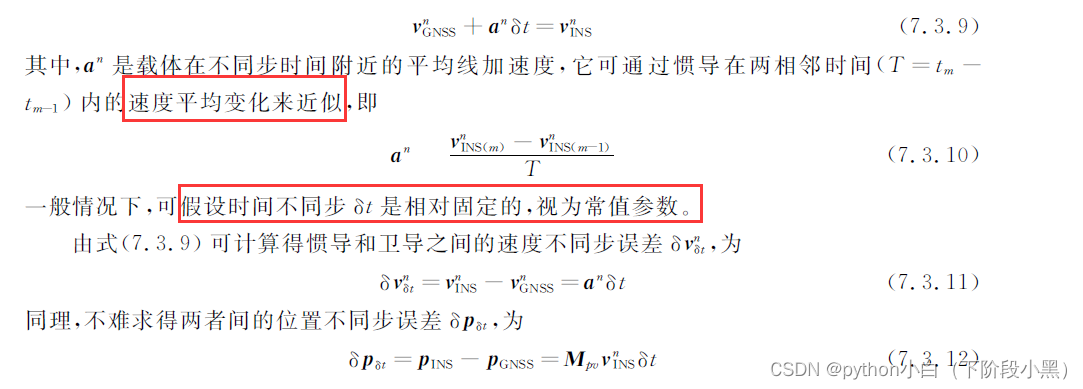
Detailed explanation of 19 dimensional integrated navigation module sinsgps in psins (time synchronization part)
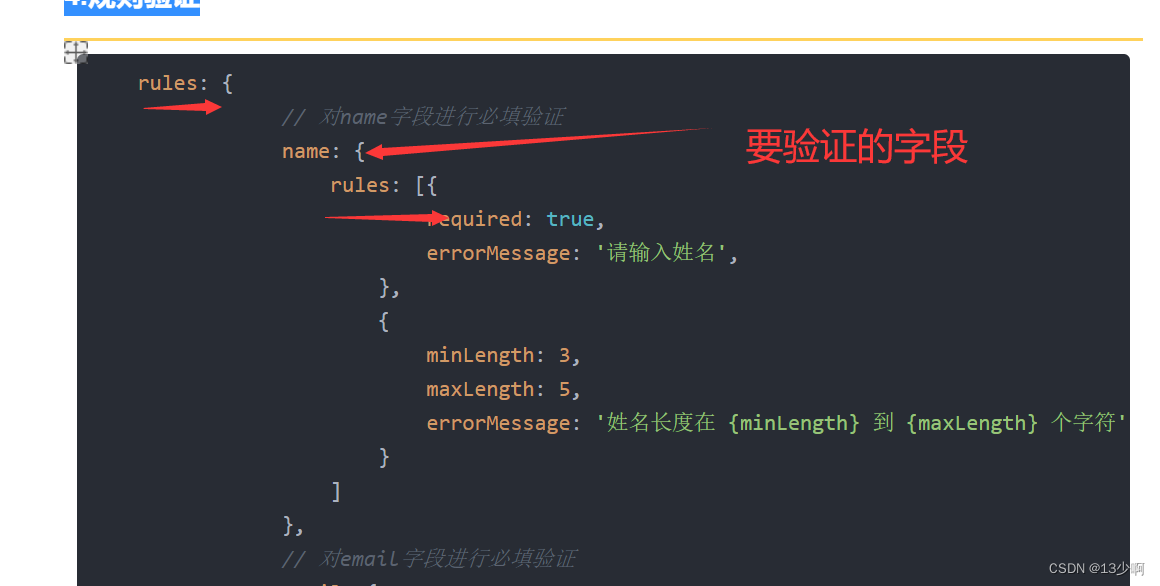
Form validation of uniapp

How to analyze fans' interests?

How to design interface test cases? Teach you a few tips to draft easily
Oauth2协议中如何对accessToken进行校验
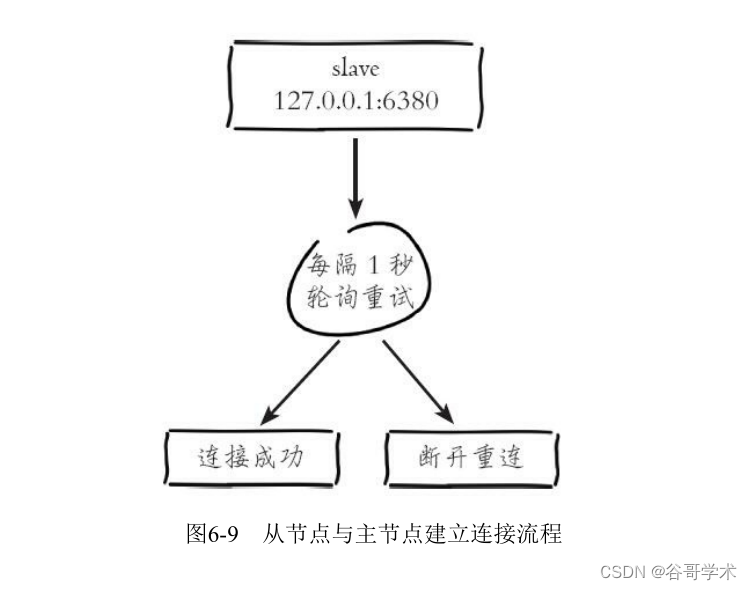
Redis introduction complete tutorial: replication principle
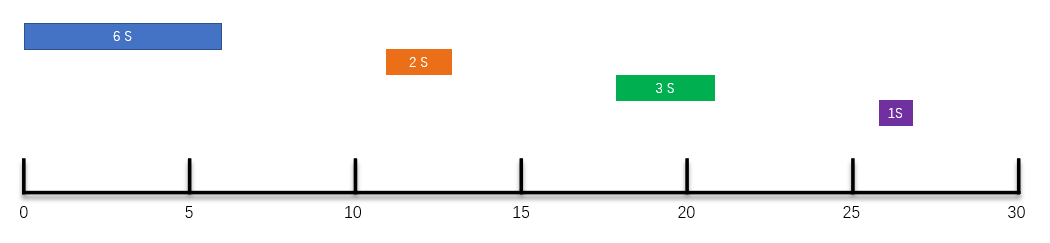
上个厕所的功夫,就把定时任务的三种调度策略说得明明白白
随机推荐
The whole process of knowledge map construction
Summary of basic debugging steps of S120 driver
Es6中Promise的使用
Redis入门完整教程:客户端案例分析
MySQL - common functions - string functions
从控制理论的角度谈数据分析
Cglib agent in agent mode
Another million qubits! Israel optical quantum start-up company completed $15million financing
Starting from 1.5, build a micro Service Framework -- log tracking traceid
Static proxy of proxy mode
Qt蓝牙:QBluetoothDeviceInfo
The annual salary of general test is 15W, and the annual salary of test and development is 30w+. What is the difference between the two?
The first symposium on "quantum computing + application of financial technology" was successfully held in Beijing
How to write test cases for test coupons?
Shell 编程基础
杰理之电话本获取【篇】
杰理之关于 DAC 输出功率问题【篇】
cocos3——8.实现初学者指南
Lingyun going to sea | yidiantianxia & Huawei cloud: promoting the globalization of Chinese e-commerce enterprise brands
MOS transistor realizes the automatic switching circuit of main and auxiliary power supply, with "zero" voltage drop and static current of 20ua