当前位置:网站首页>点云投影图片
点云投影图片
2022-07-02 07:06:00 【SmileAtlas】
标定结果使用
使用calibration_toolkit工具获取的标定文件无法直接使用,需要进行转化
相机外参矩阵中的旋转矩阵,首先需要进行转置,然后再进行罗德里格斯变换
相机外参矩阵中的平移矩阵,需要做进行换位处理
对于相机内参矩阵和相机形变矩阵则不需要做任何改变
CameraExtrinsicMat = [
[R[0][0], R[1][0], R[2][0], t[1]],
[R[0][1], R[1][1], R[2][1], t[2]],
[R[0][2], R[1][2], R[2][2], -t[0]],
[0., 0., 0., 1.]]
transfrom.py
import cv2
import numpy as np
# 先做个转置
RT = np.transpose(R)
print(RT)
# 再求罗德里德斯变换
rvec = cv2.Rodrigues(RT)[0]
print(rvec)
# 结果
# [[ 1.27379905]
# [-1.17541056]
# [ 1.15989273]]
# 原始平移矩阵
t = np.mat([
[7.0567131528775830e-03],
[6.9659648287774212e-02],
[7.3964965903196039e-02]
])
# 换位
# autoware在得到平移矩阵后进行了如下操作:
# camera_velodyne_translation.x = -camera_velodyne_point.z;
# camera_velodyne_translation.y = camera_velodyne_point.x;
# camera_velodyne_translation.z = camera_velodyne_point.y;
t_true = np.float64([[t[1]], [t[2]], [-t[0]]])
print(t_true)
# 得到的真实平移向量
# [[-0.07396497],
# [0.00705671],
# [0.06965965]]
点云重投影
步骤说明:
- 使用open3d功能包中的函数,从 .pcd 文件中读取出激光雷达点云坐标
- 声明各种内外参矩阵
- 使用opencv功能包中的函数,进行世界坐标向像素坐标的转换
- 点云重投影
#-*- coding:utf-8 -*-
"""使用获取的相机内外参数实现重投影"""
import open3d as o3d
import cv2
from PIL import Image
from pylab import *
import matplotlib.pyplot as plt
# 读取pcd点云文件,保存为array数组
cloud = o3d.io.read_point_cloud('1.pcd') # 需要准备自己的pcd文件
cloud = np.asarray(cloud.points) # 改变点云的数据类型
# 输入 projectpoints 函数的各项参数数值
# 经过矩阵转置,以及罗德里格斯变换得到的旋转矩阵
rvec = np.float64([1.27379905, -1.17541056, 1.15989273])
# 经过排序修改后得到的平移矩阵
tvec = np.float64([-0.07396497, 0.00705671, 0.06965965])
# 相机内部参数
camera_matrix = np.float64([[6.0094877060462500e+02, 0, 3.0507696130640221e+02],
[0, 6.1174212550675293e+02, 2.5274596287337977e+02],
[0, 0, 1]]) # 相机内部参数
# 相机形变矩阵
distCoeffs = np.float64([2.3030430710414049e-01, -9.1560321189489913e-01,
1.0374975865423207e-02, -8.9662215743119679e-04, 1.3506515085650497e+00])
# 进行点云由3D到2D的转换
point_2d, _ = cv2.projectPoints(cloud, rvec, tvec, camera_matrix, distCoeffs)
print(point_2d)
# 重投影绘制在图像上
im = Image.open('1.jpg')
x = []
y = []
m = -1
for point in point_2d:
m = m+1
x_2d = point[0][0]
y_2d = point[0][1]
if 0 <= x_2d <= 640 and 0 <= y_2d <= 480:
x.append(x_2d)
y.append(y_2d)
x = np.array(x)
y = np.array(y)
plt.scatter(x, y, s=1)
plt.imshow(im)
plt.show()
边栏推荐
- 高考的意义是什么
- 02-taildir source
- [pit avoidance guide] pit encountered by unity3d project when accessing Tencent bugly tool
- Excuse me, is it cost-effective to insure love life patron saint 2.0 increased lifelong life insurance? What are the advantages of this product?
- [unity3d] nested use layout group to make scroll view with dynamic sub object height
- Ks009 implement pet management system based on SSH
- lunix重新分配root 和 home 空间内存
- Record attributeerror: 'nonetype' object has no attribute 'nextcall‘
- UVM learning - object attribute of UVM phase
- Read H264 parameters from mediarecord recording
猜你喜欢

Solutions to a series of problems in sqoop job creation

Pytest learning --base

618 what is the secret of dominating the list again? Nike's latest financial report gives the answer
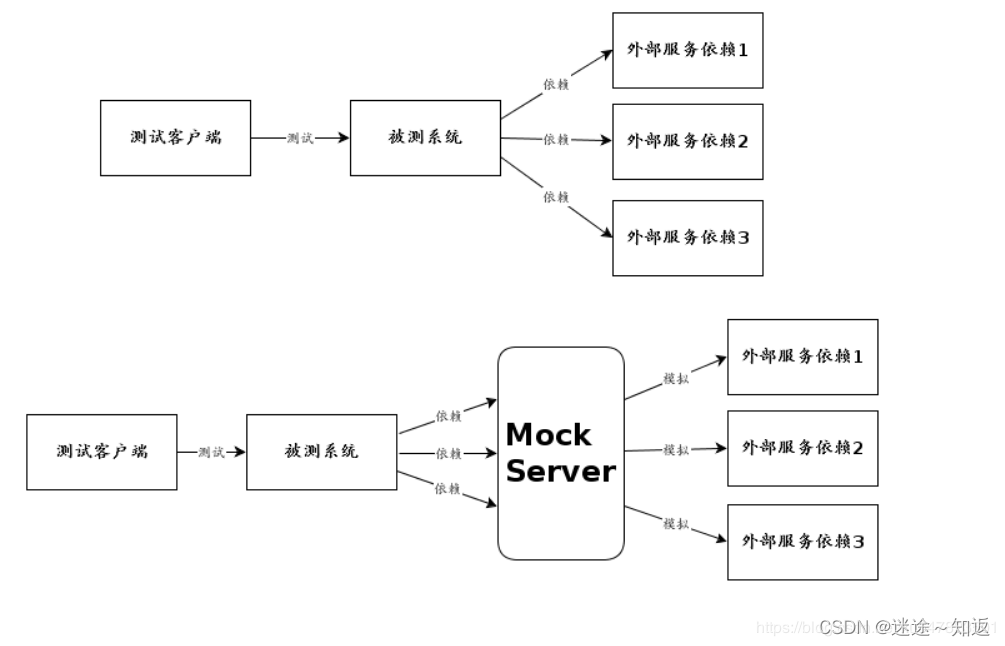
Basic usage of mock server
![[SUCTF2018]followme](/img/63/9104f9c8bd24937b0fc65053efec96.png)
[SUCTF2018]followme
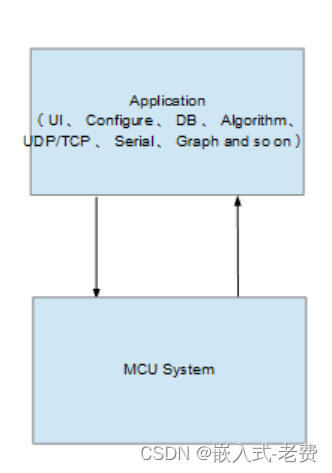
STM32 and motor development (upper system)
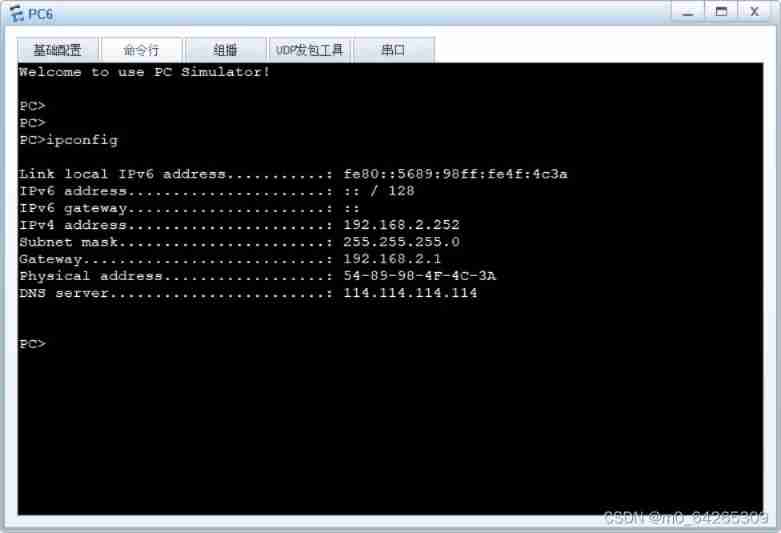
VLAN experiment
"Talking about podcasts" vol.352 the age of children: breaking the inner scroll, what can we do before high school?

使用Windbg静态分析dump文件(实战经验总结)

(5) Gear control setting of APA scene construction
随机推荐
01-spooldir
VLAN experiment
快速做出原型
[unity3d] nested use layout group to make scroll view with dynamic sub object height
flume 190 INSTALL
Pywin32打开指定窗口
Transport Optimization abstraction
Shutter - canvas custom graph
【TS】1368- 秒懂 TypeScript 泛型工具类型!
高考的意义是什么
[unity3d] cannot correctly obtain the attribute value of recttransform, resulting in calculation error
13.信号量临界区保护
js promise. all
lunix重新分配root 和 home 空间内存
Convert yv12 to rgb565 image conversion, with YUV to RGB test
618再次霸榜的秘密何在?耐克最新财报给出答案
[Fantasy 4] introduction and use of UMG components (under update...)
Sus system availability scale
传输优化抽象
SUS系统可用性量表