当前位置:网站首页>GPS从入门到放弃(十一)、差分GPS
GPS从入门到放弃(十一)、差分GPS
2022-07-06 13:46:00 【追捕的风】
一、原理
差分GPS是一种通过消除或减小GPS测量误差从而提高GPS定位精度的方法。
差分GPS消除或减小测量误差的基础原理是利用误差的相关性。以卫星时钟误差举例来说。如果我们已知一个接收机的实际精确位置,与它的测量得到的位置相减,即可得到误差项,这个误差项里就包含了卫星时钟误差。如果另一个接收机也在附近接收同样的卫星信号来定位,它就可以在计算时把这个误差项减掉,这样就消除了卫星时钟误差,因为对于这两个接收机来说,他们的卫星时钟误差是相同的,这也就是误差的相关性。
当然,对两个接收机来说,不是所有的误差都相同,但是在一定范围内,还是有一些误差是相近的。比如电离层延时,若两个接收机距离很近,可以近似认为是相同的;同理,对流层延时、卫星星历也存在这种相关性。另外一些误差如多路径、接收机噪声等就不相关了,于是这样的误差无法通过差分GPS来消除,相反,它们还会造成误差的叠加。
在这一差分方法中,我们把已知位置的接收机称为基准站或者基站,位置未知的称为流动站,由基准站播发误差校正值,流动站则利用误差校正值来校正位置。
从差分GPS的工作原理很容易可以看出,流动站离基准站越近,校正效果就会越好。我们把流动站到基准站之间的距离称为基线距离,其长度为基线长度。
二、分类
按基线距离分类:局域、区域、广域
- 局域一般10km~100km。
- 广域可覆盖整个大陆或全球。
- 区域介于局域和广域两者之间。
- 按差分校正的目标参量不同,可分为:位置差分、伪距差分、载波相位差分
- 位置差分:基站播发的是其根据自身伪距观测值计算出的位置与已知的自身位置之差,流动站根据自身伪距观测值计算出位置后再加上接收到的基站播发的差值得到自身的最终位置。这种方式要求流动站与基准站各自计算得到的位置坐标中包含相同的误差项,也就需要流动站和基准站采用同一种定位算法和同一套卫星测量值,比较难实现,性能不好,所以用的不多。
- 伪距差分:基站播发的是其自身伪距观测值与已知的自身到卫星的距离之差,流动站用自身伪距观测值再加上接收到的基站播发的伪距差值得到自身的最终伪距,再用于位置解算。这种方式不要求流动站和基准站采用同一种定位算法,其精度可达分米级。
- 载波相位差分:类似于伪距差分,只不过基站播发的是载波相位差分修正项,差分修正项中并不需要解出周整模糊度,只需保持其值不变就行;流动站还是需要解决周整模糊度问题。这种方式精度最高可达毫米级。
按定位结果可分为:绝对定位、相对定位
- 绝对定位需要知道基准站的精确位置。
- 相对定位求的是流动站相对基站的位置,此时基站的绝对位置可以不知道,基站可以直接把观测值播发给流动站,而不是播发差分修正项。
按差分级数分:单差、双差、三差
单差:是两个不同接收机对同一颗卫星的测量值的差分。可以消除卫星钟差。在短基线的情况下,也可以基本消除大气层延时误差。卫星星历误差也基本消除。但测量噪声的均方差扩大为原来的根号2倍。
双差:两个接收机在同一时刻对两颗卫星的测量值之差,相当于两个单差之差,可以消除接收机钟差。这是因为接收机钟差差异对不同的卫星来说是相同的。双差噪声均方差为单差的 根号2倍。
三差:两个接收机在两个时刻对两颗卫星的测量值之差,相当于两个双差之差,可以消除双差周整模糊度。这是因为当接收机锁定某一卫星信号时,它对该卫星信号的载波相位测量值中的周整模糊度就保持不变。三差噪声均方差为双差的根号2倍。
按运动状态分:静态定位、动态定位
- 静态定位:可以长时间持续收集测量值,并做测后处理,以提高精度。
- 动态定位:通常要满足实时性要求。
按实时性要求分:实时处理、测后处理
三、进一步改进措施
- 基准站选址一般视野开阔、地面反射较弱、地势较高的地方,且选择扼流圈天线和高品质接收机,以尽可能地抑制多路径效应和自身的误差。
- 基准站播发扣除自身钟差影响后的伪距校正值,以避免给用户接收机增加误差。
- 基准站除了播发伪距校正值以外,还同时播发伪距校正值的变化率,以方便用户接收机使用。
- 大基线情况下,基准站和流动站分别采用当地的电离层、对流层模型,可以提高定位精度。
- 若一个区域有多个基准站覆盖,可以分别校正后加权平均,能减小误差,提高精度。
- 广域差分GPS系统通常对卫星星历误差、卫星时钟误差、电离层延时等分别提供差分校正量。
边栏推荐
- Uni app app half screen continuous code scanning
- 关于char[]数组通过scanf赋值使用上的一些问题。。
- Shake Sound poussera l'application indépendante de plantation d'herbe "louable", les octets ne peuvent pas oublier le petit livre rouge?
- 红杉中国,刚刚募资90亿美元
- Reset Mikrotik Routeros using netinstall
- 基于InsightFace的高精度人脸识别,可直接对标虹软
- 新入职一家公司需要去实践和注意的内容
- 华为在多个行业同时出击,吓人的技术让欧美企业瑟瑟发抖
- MySQL removes duplicates according to two fields
- [daily] win10 system setting computer never sleeps
猜你喜欢

LeetCode学习记录(从新手村出发之杀不出新手村)----1
AI 企业多云存储架构实践 | 深势科技分享
PostgreSQL install GIS plug-in create extension PostGIS_ topology

华为在多个行业同时出击,吓人的技术让欧美企业瑟瑟发抖

一行代码可以做些什么?
Leetcode learning records (starting from the novice village, you can't kill out of the novice Village) ---1
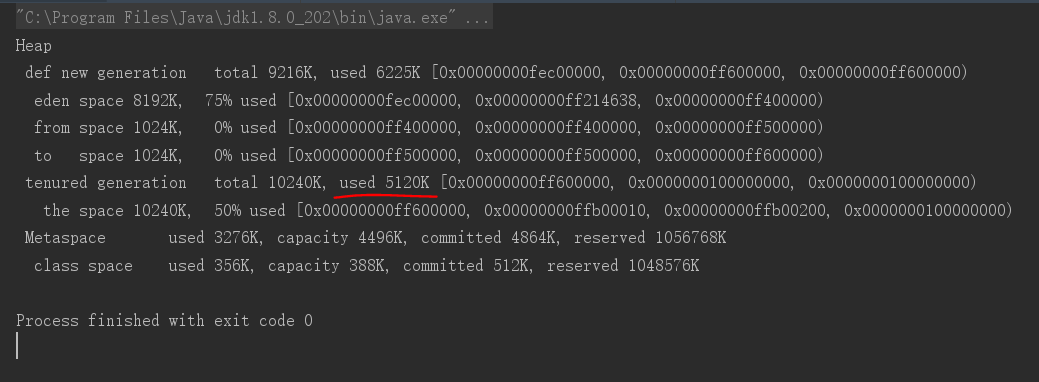
jvm:大对象在老年代的分配
![[Chongqing Guangdong education] Information Literacy of Sichuan Normal University: a new engine for efficiency improvement and lifelong learning reference materials](/img/a5/94bdea3a871db5305ef54e3b304beb.jpg)
[Chongqing Guangdong education] Information Literacy of Sichuan Normal University: a new engine for efficiency improvement and lifelong learning reference materials

Sparkshuffle process and Mr shuffle process
数字化转型挂帅复产复工,线上线下全融合重建商业逻辑
随机推荐
Codeforces Round #274 (Div. 2) –A Expression
Michael smashed the minority milk sign
跨分片方案 总结
数字化转型挂帅复产复工,线上线下全融合重建商业逻辑
string的底层实现
Z function (extended KMP)
[Li Kou brushing questions] one dimensional dynamic planning record (53 change exchanges, 300 longest increasing subsequence, 53 largest subarray and)
PostgreSQL modifies the password of the database user
Run the deep network on PI and Jetson nano, and the program is killed
PostgreSQL 安装gis插件 CREATE EXTENSION postgis_topology
C how to set two columns comboboxcolumn in DataGridView to bind a secondary linkage effect of cascading events
11、 Service introduction and port
Realization of epoll reactor model
Five wars of Chinese Baijiu
numpy 下载安装
抖音將推獨立種草App“可頌”,字節忘不掉小紅書?
OpenCV300 CMake生成project在项目过程中的问题
Summary of cross partition scheme
在Pi和Jetson nano上运行深度网络,程序被Killed
NPM run dev start project error document is not defined