当前位置:网站首页>四元数、罗德里格斯公式、欧拉角、旋转矩阵推导和资料
四元数、罗德里格斯公式、欧拉角、旋转矩阵推导和资料
2022-08-02 02:20:00 【诺有缸的高飞鸟】
写在前面
1、本文内容
四元数、罗德里格斯公式、欧拉角、旋转矩阵推导和资料
2、转载请注明出处:
https://blog.csdn.net/qq_41102371/article/details/126002167
资料
四元数
Understanding Quaternions 中文翻译《理解四元数》 https://www.qiujiawei.com/understanding-quaternions/
http://mars.cs.umn.edu/tr/reports/Trawny05b.pdf
几种三维空间旋转的表达方式转换
三维旋转:欧拉角、四元数、旋转矩阵、轴角之间的转换 https://zhuanlan.zhihu.com/p/45404840
彻底搞懂“旋转矩阵/欧拉角/四元数”,让你体会三维旋转之美 https://blog.csdn.net/weixin_45590473/article/details/122884112
展示欧拉角与四元数动态变换关系的网站
https://quaternions.online/
罗德里格斯公式
https://en.wikipedia.org/wiki/Rodrigues’_rotation_formula
罗德里格斯公式(Rodrigues Formula) https://blog.csdn.net/weixin_40215443/article/details/123950141
二维xy坐标旋转 https://blog.csdn.net/qq_41102371/article/details/116245483#t4
推导
先放这,有空来推一遍
几种表达方式
K K K是 k k k的叉乘矩阵,即 K = k ∧ \mathbf{K}=\mathbf{k}^{\land} K=k∧,( k \mathbf{k} k的叉乘矩阵也可表示为 k × \mathbf{k}_{\times} k×)
1、
R = I + ( 1 − cos θ ) K 2 + ( sin θ ) K = I + ( 1 − cos θ ) [ k ∧ ] 2 + ( sin θ ) k ∧ \begin{aligned} \mathbf{R}&=\mathbf{I}+(1-\cos\theta)\mathbf{K}^2+(\sin\theta)\mathbf{K}\\ &=\mathbf{I}+(1-\cos\theta)[\mathbf{k}^{\land}]^2+(\sin\theta)\mathbf{k}^{\land}\\ \end{aligned} R=I+(1−cosθ)K2+(sinθ)K=I+(1−cosθ)[k∧]2+(sinθ)k∧
2、
由 K 2 = k ∧ k ∧ = k k T − I \mathbf{K}^2=\mathbf{k}^{\land}\mathbf{k}^{\land}=\mathbf{k}\mathbf{k}^T-\mathbf{I} K2=k∧k∧=kkT−I
可得
R = I + ( 1 − cos θ ) ( k k T − I ) + ( sin θ ) k ∧ = cos θ I + ( 1 − cos θ ) k k T + ( sin θ ) k ∧ \begin{aligned} \mathbf{R}&=\mathbf{I}+(1-\cos\theta)(\mathbf{k}\mathbf{k}^T-\mathbf{I})+(\sin\theta)\mathbf{k}^{\land}\\ &=\cos\theta\mathbf{I}+(1-\cos\theta)\mathbf{k}\mathbf{k}^T+(\sin\theta)\mathbf{k}^{\land} \end{aligned} R=I+(1−cosθ)(kkT−I)+(sinθ)k∧=cosθI+(1−cosθ)kkT+(sinθ)k∧
3、
高博的14讲中推导了指数映射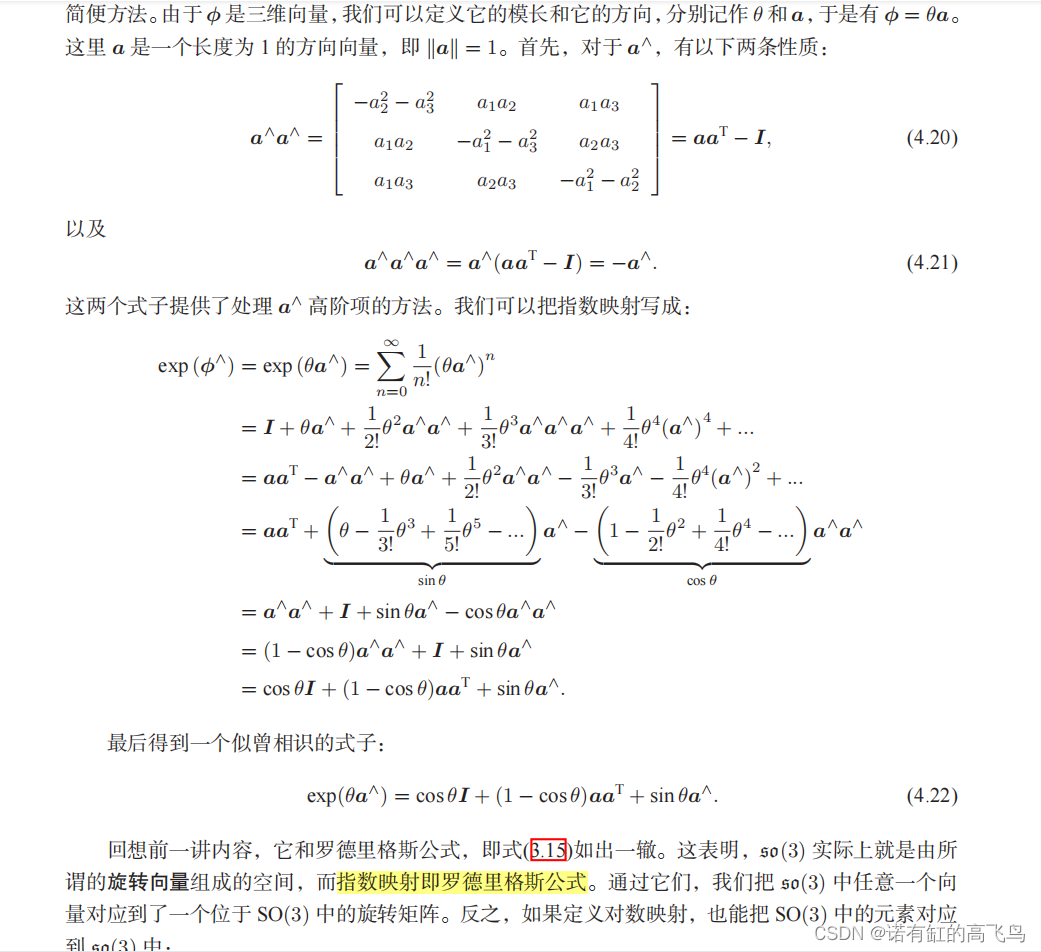
R = e x p ( θ k ∧ ) = cos θ I + ( 1 − cos θ ) k k T + ( sin θ ) k ∧ \mathbf{R}=exp(\theta \mathbf{k}^{\land})=\cos\theta\mathbf{I}+(1-\cos\theta)\mathbf{k}\mathbf{k}^T+(\sin\theta)\mathbf{k}^{\land} R=exp(θk∧)=cosθI+(1−cosθ)kkT+(sinθ)k∧
四元数转旋转矩阵
根据http://mars.cs.umn.edu/tr/reports/Trawny05b.pdf,四元数转旋转矩阵为: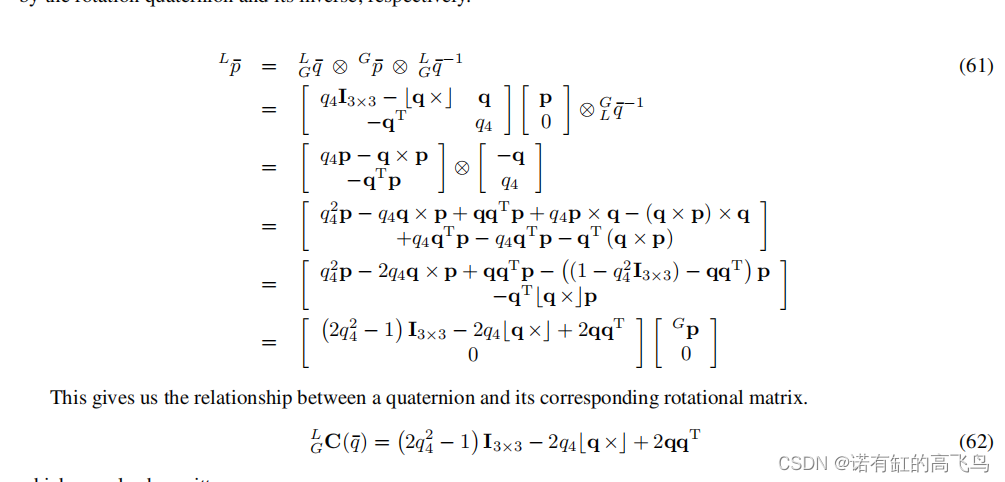

G L C ( q ˉ ) = ( 2 q 4 2 − 1 ) I 3 × 3 − 2 q 4 [ q × ] + 2 q q T = ( 2 q 4 2 − 1 ) I 3 × 3 − 2 q 4 [ q × ] + 2 [ q × ] 2 + 2 ∣ q ∣ 2 ⋅ I 3 × 3 = ( 2 q 4 2 + 2 ∣ q ∣ 2 − 1 ) I 3 × 3 − 2 q 4 [ q × ] + 2 [ q × ] 2 = ( 2 q 4 2 + 2 ( q 1 2 + q 2 2 + q 3 2 ) − 1 ) I 3 × 3 − 2 q 4 [ q × ] + 2 [ q × ] 2 = ( 2 − 1 ) I 3 × 3 − 2 q 4 [ q × ] + 2 [ q × ] 2 = I 3 × 3 − 2 q 4 [ q × ] + 2 [ q × ] 2 \begin{aligned} {}_G^L\mathbf{C}(\bar{q})&=(2q_4^2-1)\mathbf{I}_{3\times3}-2q_4[\mathbf{q}_{\times}]+2\mathbf{q}\mathbf{q}^T\\ &=(2q_4^2-1)\mathbf{I}_{3\times3}-2q_4[\mathbf{q}_{\times}]+2[\mathbf{q}_{\times}]^2+2|\mathbf{q}|^2\cdot \mathbf{I}_{3\times3}\\ &=(2q_4^2+2|\mathbf{q}|^2-1)\mathbf{I}_{3\times3}-2q_4[\mathbf{q}_{\times}]+2[\mathbf{q}_{\times}]^2\\ &=(2q_4^2+2(q_1^2+q_2^2+q_3^2)-1)\mathbf{I}_{3\times3}-2q_4[\mathbf{q}_{\times}]+2[\mathbf{q}_{\times}]^2\\ &=(2-1)\mathbf{I}_{3\times3}-2q_4[\mathbf{q}_{\times}]+2[\mathbf{q}_{\times}]^2\\ &=\mathbf{I}_{3\times3}-2q_4[\mathbf{q}_{\times}]+2[\mathbf{q}_{\times}]^2 \end{aligned} GLC(qˉ)=(2q42−1)I3×3−2q4[q×]+2qqT=(2q42−1)I3×3−2q4[q×]+2[q×]2+2∣q∣2⋅I3×3=(2q42+2∣q∣2−1)I3×3−2q4[q×]+2[q×]2=(2q42+2(q12+q22+q32)−1)I3×3−2q4[q×]+2[q×]2=(2−1)I3×3−2q4[q×]+2[q×]2=I3×3−2q4[q×]+2[q×]2
其中 q ˉ = [ q q 4 ] = [ q 1 , q 2 , q 3 , q 4 ] T \bar{q}=\begin{bmatrix}\mathbf{q}\\q_4\end{bmatrix}=[q_1,q_2,q_3,q_4]^T qˉ=[qq4]=[q1,q2,q3,q4]T, q = [ q 1 , q 2 , q 3 ] T \mathbf{q}=[q_1,q_2,q_3]^T q=[q1,q2,q3]T, q 1 2 + q 2 2 + q 3 2 + q 4 2 = 1 q_1^2+q_2^2+q_3^2+q_4^2=1 q12+q22+q32+q42=1
则
G L R = [ 1 − 2 q 2 2 − 2 q 3 2 2 ( q 1 q 2 + q 3 q 4 ) 2 ( q 1 q 3 − q 2 q 4 ) 2 ( q 1 q 2 − q 3 q 4 ) 1 − 2 q 1 2 − 2 q 3 2 2 ( q 2 q 3 + q 1 q 4 ) 2 ( q 1 q 3 + q 2 q 4 ) 2 ( q 2 q 3 − q 1 q 4 ) 1 − 2 q 1 2 − 2 q 2 2 ] {}_G^L\!R= \begin{bmatrix} 1-2q_2^2-2q_3^2& 2(q_1q_2+q_3q_4) & 2(q_1q_3-q_2q_4) \\ 2(q_1q_2-q_3q_4) & 1-2q_1^2-2q_3^2 & 2(q_2q_3+q_1q_4) \\ 2(q_1q_3+q_2q_4)& 2(q_2q_3-q_1q_4) & 1-2q_1^2-2q_2^2 \end{bmatrix} GLR=⎣⎡1−2q22−2q322(q1q2−q3q4)2(q1q3+q2q4)2(q1q2+q3q4)1−2q12−2q322(q2q3−q1q4)2(q1q3−q2q4)2(q2q3+q1q4)1−2q12−2q22⎦⎤
即将世界坐标系下的点 P G P^G PG旋转到局部坐标系下的点 P L P^L PL
P L = G L R P G P^L={}_G^L\!R P^G PL=GLRPG
而
三维旋转:欧拉角、四元数、旋转矩阵、轴角之间的转换 https://zhuanlan.zhihu.com/p/45404840中是将局部坐标系下的点 P L P^L PL转换到世界坐标系下的 P G P^G PG:
L G R = [ 1 − 2 q 2 2 − 2 q 3 2 2 ( q 1 q 2 − q 3 q 4 ) 2 ( q 1 q 3 + q 2 q 4 ) 2 ( q 1 q 2 + q 3 q 4 ) 1 − 2 q 1 2 − 2 q 3 2 2 ( q 2 q 3 − q 1 q 4 ) 2 ( q 1 q 3 − q 2 q 4 ) 2 ( q 2 q 3 + q 1 q 4 ) 1 − 2 q 1 2 − 2 q 2 2 ] {}_L^G\!R= \begin{bmatrix} 1-2q_2^2-2q_3^2& 2(q_1q_2-q_3q_4) & 2(q_1q_3+q_2q_4) \\ 2(q_1q_2+q_3q_4) & 1-2q_1^2-2q_3^2 & 2(q_2q_3-q_1q_4) \\ 2(q_1q_3-q_2q_4)& 2(q_2q_3+q_1q_4) & 1-2q_1^2-2q_2^2 \end{bmatrix} LGR=⎣⎡1−2q22−2q322(q1q2+q3q4)2(q1q3−q2q4)2(q1q2−q3q4)1−2q12−2q322(q2q3+q1q4)2(q1q3+q2q4)2(q2q3−q1q4)1−2q12−2q22⎦⎤
P G = L G R P L P^G={}_L^G\!R P^L PG=LGRPL
这正好满足:
G L R = L G R T ( G L R = L G R − 1 ) {}_G^L\!R ={ {}_L^G\!R}^T({}_G^L\!R ={ {}_L^G\!R}^{-1}) GLR=LGRT(GLR=LGR−1)
近似
根据http://mars.cs.umn.edu/tr/reports/Trawny05b.pdf原文当 δ q ˉ \delta\bar{q} δqˉ非常小时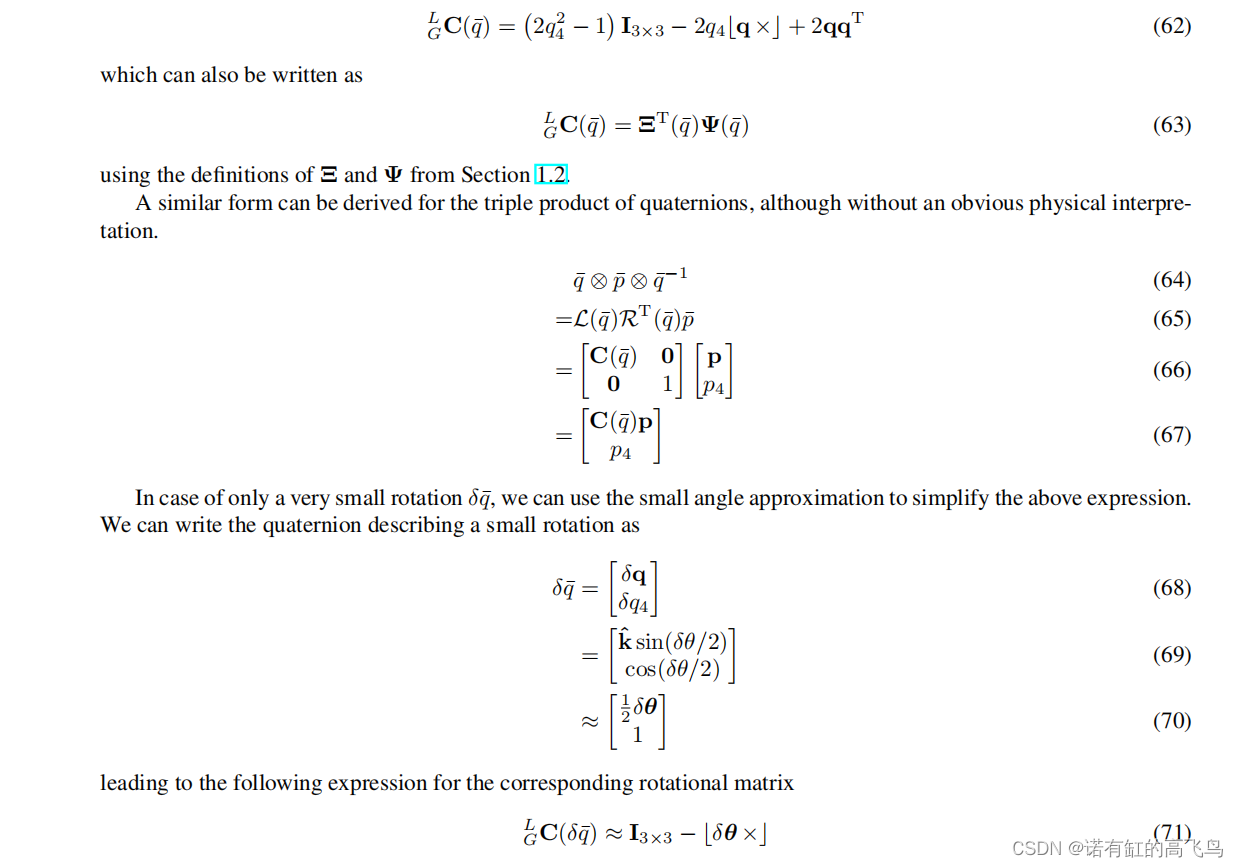
以下为个人理解的推导
G L C ( q ˉ ) = ( 2 q 4 2 − 1 ) I 3 × 3 − 2 q 4 [ q × ] + 2 q q T ≈ ( 2 × 1 2 − 1 ) I 3 × 3 − 2 × 1 [ 1 2 δ θ × ] + 2 × 0 3 × 3 = I 3 × 3 − [ δ θ × ] \begin{aligned} {}_G^L\mathbf{C}(\bar{q})&=(2q_4^2-1)\mathbf{I}_{3\times3}-2q_4[\mathbf{q}_{\times}]+2qq^T\\ &\approx (2\times1^2-1)\mathbf{I}_{3\times3}-2\times 1[\frac{1}{2}\delta \mathbf{\theta}_{\times}]+2\times0_{3\times3}\\ &=\mathbf{I}_{3\times3}-[\delta \mathbf{\theta}_{\times}] \end{aligned} GLC(qˉ)=(2q42−1)I3×3−2q4[q×]+2qqT≈(2×12−1)I3×3−2×1[21δθ×]+2×03×3=I3×3−[δθ×]
其中 q q T ≈ 0 3 × 3 qq^T\approx0_{3\times3} qqT≈03×3
四元数与轴角
还是参考http://mars.cs.umn.edu/tr/reports/Trawny05b.pdf,
q ˉ = [ q q 4 ] = [ q 1 q 2 q 3 q 4 ] = [ k x sin ( θ / 2 ) k y sin ( θ / 2 ) k z sin ( θ / 2 ) cos ( θ / 2 ) ] = [ k ^ sin ( θ / 2 ) cos ( θ / 2 ) ] , k ^ = [ k x , k y , k z ] T , q 4 = cos ( θ / 2 ) \bar{q}=\begin{bmatrix}\mathbf{q}\\q_4\end{bmatrix}=\begin{bmatrix}q_1\\q_2\\q_3\\q_4\end{bmatrix}=\begin{bmatrix}k_x\sin(\theta/2)\\k_y\sin(\theta/2)\\k_z\sin(\theta/2)\\\cos(\theta/2)\end{bmatrix}=\begin{bmatrix}\hat{\mathbf{k}}\sin(\theta/2)\\\cos(\theta/2)\end{bmatrix},\hat{\mathbf{k}}=[k_x,k_y,k_z]^T,q_4=\cos(\theta/2) qˉ=[qq4]=⎣⎡q1q2q3q4⎦⎤=⎣⎡kxsin(θ/2)kysin(θ/2)kzsin(θ/2)cos(θ/2)⎦⎤=[k^sin(θ/2)cos(θ/2)],k^=[kx,ky,kz]T,q4=cos(θ/2)
参考
文中已列出
完
如有错漏,敬请指正
--------------------------------------------------------------------------------------------202207
边栏推荐
猜你喜欢






随机推荐
一次SQL优化,数据库查询速度提升 60 倍
LeetCode brushing diary: 33. Search and rotate sorted array
MySQL optimization strategy
NIO‘s Sword(牛客多校赛)
LeetCode brushing diary: 53, the largest sub-array and
【LeetCode Daily Question】——704. Binary Search
CodeTon Round 2 D. Magical Array 规律
优炫数据库导库导错了能恢复吗?
messy website
Analysis of the status quo of digital transformation of manufacturing enterprises
[ORB_SLAM2] SetPose, UpdatePoseMatrices
【LeetCode每日一题】——654.最大二叉树
Redis for distributed applications in Golang
JVM调优实战
GTK RGB图像绘制
Force buckle, 752-open turntable lock
Handwriting a blogging platform ~ the first day
十字光标太小怎么调节、CAD梦想画图算量技巧
列表常用方法
openGauss切换后state状态显示不对