当前位置:网站首页>Blogger article navigation (classified, real-time update, permanent top)
Blogger article navigation (classified, real-time update, permanent top)
2022-07-05 08:56:00 【Li Yingsong~】
Constant code :: Include Constant theory Series with the Code on the actual battle series , An algorithm , From theory to coding , Bloggers teach carefully . Hang Dao immediately , See skill .
:: Constant code , It's for the general !
:: The general , Please put on the code !
The purpose of this blog is to be a blog transit station . After too many blog posts , One reader cannot quickly find the article he wants to read ; Moreover, readers cannot quickly understand all the blog fields of bloggers . Make this transit station to classify blog posts , Quickly locate the blog you want to read and click it directly ( Hyperlink click jump ).
Blogger article navigation ( Be arranged , Real time updates , Permanent top )
1 3D reconstruction series
1.1 Basic knowledge series
1. Coordinate system and transformation relationship in binocular stereo vision
2. Kernel constraint in binocular stereo matching [ Epipolar constraints ]
3. Detailed explanation of binocular stereo matching steps
4. Easily master the geometric basis of computer vision 3D reconstruction : Coordinate system and key matrix ( Basic matrix 、 The essential matrix 、 Homography matrix )
5【 Technical genre 】 Teach you to improve the accuracy of binocular stereo vision system !
6 Understand rotation matrix from the perspective of base transformation R
7【 Technical genre 】 Spatial accuracy of binocular stereo vision system : Accurate quantitative analysis !
1.2 Stereo matching series
1.2.1 SGM series
Theory constant Talk Series
【 Constant theory 】【 Stereo matching series 】 classic SGM:(1) Mutual information of matching cost calculation (MI)
【 Constant theory 】【 Stereo matching series 】 classic SGM:(2) Calculation of matching cost Census Transformation
【 Constant theory 】【 Stereo matching series 】 classic SGM:(3) Cost aggregation (Cost Aggregation)
【 Constant theory 】【 Stereo matching series 】 classic SGM:(4) Parallax calculation 、 Parallax optimization
Code combat series
【 Code on the actual battle 】【 Stereo matching series 】 classic SGM:(1) Framework and class design
【 Code on the actual battle 】【 Stereo matching series 】 classic SGM:(2) Cost calculation
【 Code on the actual battle 】【 Stereo matching series 】 classic SGM:(3) Cost aggregation
【 Code on the actual battle 】【 Stereo matching series 】 classic SGM:(4) Cost aggregation 2
【 Code on the actual battle 】【 Stereo matching series 】 classic SGM:(5) Parallax optimization
【 Code on the actual battle 】【 Stereo matching series 】 classic SGM:(6) Parallax filling
【 Code on the actual battle 】【 Stereo matching series 】 classic SGM:(7) Weak texture Optimization
1.2.2 PatchMatch series
Theory constant Talk Series
【 Constant theory 】【 Stereo matching series 】 classic PatchMatch: (1)Slanted support windows Inclined support window model
【 Constant theory 】【 Stereo matching series 】 classic PatchMatch: (2) be based on PatchMatch Parallax estimation
【 Constant theory 】【 Stereo matching series 】 classic PatchMatch: (3) post-processing ( Consistency check and parallax filling )
Code combat series
【 Code on the actual battle 】【 Stereo matching series 】 classic PatchMatch: (1) frame
【 Code on the actual battle 】【 Stereo matching series 】 classic PatchMatch: (2) The main class
【 Code on the actual battle 】【 Stereo matching series 】 classic PatchMatch: (3) Random initialization
【 Code on the actual battle 】【 Stereo matching series 】 classic PatchMatch: (4) Cost calculation
【 Code on the actual battle 】【 Stereo matching series 】 classic PatchMatch: (5) Iterative propagation
【 Code on the actual battle 】【 Stereo matching series 】 classic PatchMatch: (6) post-processing
1.2.3 AD-Census series
Theory constant Talk Series
【 Constant theory 】【 Stereo matching series 】 classic AD-Census: (1) Cost calculation
【 Constant theory 】【 Stereo matching series 】 classic AD-Census: (2) Cross domain cost aggregation (Cross-based Cost Aggregation)
【 Constant theory 】【 Stereo matching series 】 classic AD-Census: (3) Scan line optimization (Scanline Optimization)
【 Constant theory 】【 Stereo matching series 】 classic AD-Census: (4) Multistep parallax optimization
Code combat series
【 Code on the actual battle 】【 Stereo matching series 】 classic AD-Census: (1) frame
【 Code on the actual battle 】【 Stereo matching series 】 classic AD-Census: (2) The main class
【 Code on the actual battle 】【 Stereo matching series 】 classic AD-Census: (3) Cost calculation
【 Code on the actual battle 】【 Stereo matching series 】 classic AD-Census: (4) Cross domain cost aggregation
【 Code on the actual battle 】【 Stereo matching series 】 classic AD-Census: (5) Scan line optimization
【 Code on the actual battle 】【 Stereo matching series 】 classic AD-Census: (6) Multistep parallax optimization
1.3 Introduction to stereo vision series
1. Introduction to stereo vision (1): Coordinate system and camera parameters
2. Introduction to stereo vision (2): Key matrix
3. Introduction to stereo vision (3): Zhang calibration method of camera calibration
1.4 Depth sensor series
1. Structured light scanner ( Wikipedia full translation )
2. TOF The camera (Time of Fight Camera)( Wikipedia full translation )
2 Efficiency optimization series
2.1 Multithreading series
2.2 GPU series
1.【 meet CUDA】 faster , Please improve the efficiency of data transmission !
2.【 meet CUDA】CUDA Overview of key points for improving algorithm efficiency
3.【 meet CUDA】 Thread model and memory model
4. Let's play one. GPU Version of SGM, See if you can win KITTI Acquisition vehicle
3 Development experience series
1. C++ Study | C++ Implement Use | eliminate warning C4251 | Compact library interface
2. Don't exclude Chinese Notes
3. Visual Studio C++ Remote debugging
4. Software development documentation ( And ) A schematic diagram | clear
5. Play games and reduce the frequency ? Running points is not good ? Give you the CPU Depressurization , Speed up !
6. OpenSceneGraph | OSG How to store texture osgb Format can save space
7. The use of stack memory by recursive functions
8. Close test effectively , Perfect solution Github Unable to access and do not display pictures
4 Program life series
1. Starting point for dream building
2. First know stereo matching
3. Let's have a formula
4. Visual stereo matching Jianghu
5. Algorithm efficiency optimization fun
About bloggers :
Ethan Li Li Yingsong ( You know : Li Yingsong )
Wuhan University Doctor of photogrammetry and remote sensing
Main direction Stereo matching 、 Three dimensional reconstruction
2019 Won the first prize of scientific and technological progress in surveying and mapping in ( Provincial and ministerial level )
Love 3D , Love sharing , Love open source
GitHub: https://github.com/ethan-li-coding
mailbox :[email protected]
Personal wechat :
Welcome to exchange !
Pay attention to bloggers and don't get lost , thank !
Blog home page :https://ethanli.blog.csdn.net

边栏推荐
- 容易混淆的基本概念 成员变量 局部变量 全局变量
- location search 属性获取登录用户名
- My university
- Golang foundation - the time data inserted by golang into MySQL is inconsistent with the local time
- Chris LATTNER, the father of llvm: why should we rebuild AI infrastructure software
- Shift operation of complement
- Program error record 1:valueerror: invalid literal for int() with base 10: '2.3‘
- MPSoC QSPI flash upgrade method
- 【日常训练】1200. 最小绝对差
- notepad++
猜你喜欢

My experience from technology to product manager
Use and programming method of ros-8 parameters

Numpy pit: after the addition of dimension (n, 1) and dimension (n,) array, the dimension becomes (n, n)
![Introduction Guide to stereo vision (3): Zhang calibration method of camera calibration [ultra detailed and worthy of collection]](/img/d8/39020b1ce174299f60b6f278ae0b91.jpg)
Introduction Guide to stereo vision (3): Zhang calibration method of camera calibration [ultra detailed and worthy of collection]
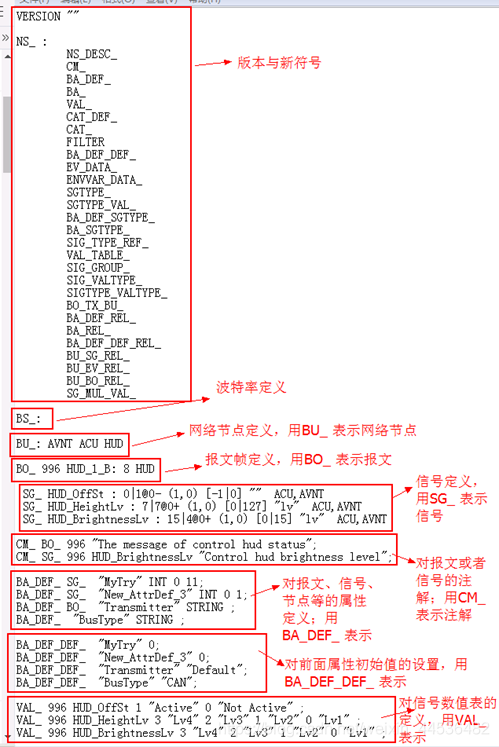
AUTOSAR从入门到精通100讲(103)-dbc文件的格式以及创建详解

IT冷知识(更新ing~)
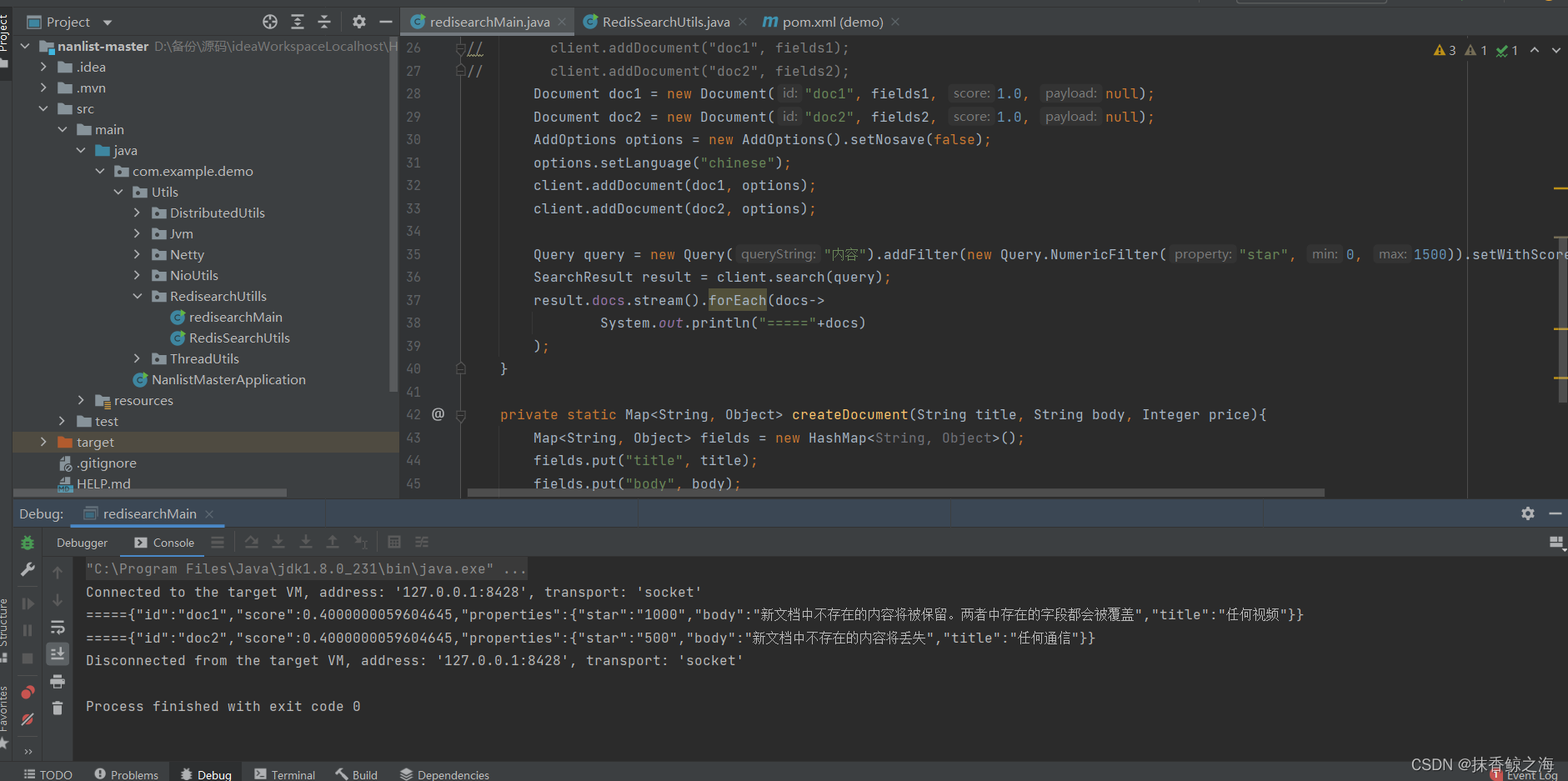
Redis实现高性能的全文搜索引擎---RediSearch
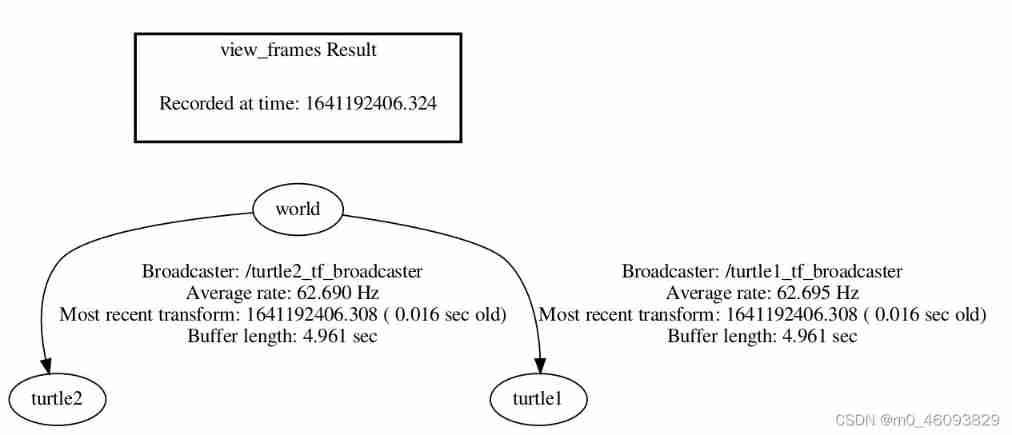
TF coordinate transformation of common components of ros-9 ROS
Wechat H5 official account to get openid climbing account

生成对抗网络
随机推荐
Latex improve
Halcon Chinese character recognition
Golang foundation - the time data inserted by golang into MySQL is inconsistent with the local time
c#比较两张图像的差异
Codeworks round 638 (Div. 2) cute new problem solution
Business modeling of software model | overview
Halcon wood texture recognition
Codeforces Round #648 (Div. 2) E.Maximum Subsequence Value
Halcon blob analysis (ball.hdev)
C#绘制带控制点的Bezier曲线,用于点阵图像及矢量图形
kubeadm系列-01-preflight究竟有多少check
ORACLE进阶(三)数据字典详解
Pearson correlation coefficient
微信H5公众号获取openid爬坑记
Use arm neon operation to improve memory copy speed
TF coordinate transformation of common components of ros-9 ROS
OpenFeign
287. Looking for repeats - fast and slow pointer
生成对抗网络
RT thread kernel quick start, kernel implementation and application development learning with notes