当前位置:网站首页>RT thread kernel quick start, kernel implementation and application development learning with notes
RT thread kernel quick start, kernel implementation and application development learning with notes
2022-07-05 08:50:00 【Chaser Bridge】
Preface
Official documents for beginners :
Keil Simulator STM32F103 (rt-thread.org) https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/tutorial/quick-start/stm32f103-simulator/stm32f103-simulator official API Reference manual :
https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/tutorial/quick-start/stm32f103-simulator/stm32f103-simulator official API Reference manual :
RT-Thread API Reference manual : event_sample.chttps://www.rt-thread.org/document/api/event_sample_8c-example.html#a10 The following contents are sorted out at any time with learning , Some come from wildfires 《RT-Thread Kernel Implementation and application development 》 Learning notes of , Some things from the official website , Write down what you think is difficult to remember and important .
You can browse and know , As for you who want to know more, I hope you can read the relevant documents by yourself .
Quick start
You can go to the official documentation
First of all, will KEIL download , There are relevant routines on the official website
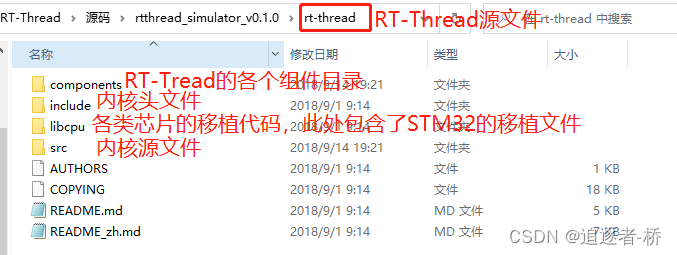
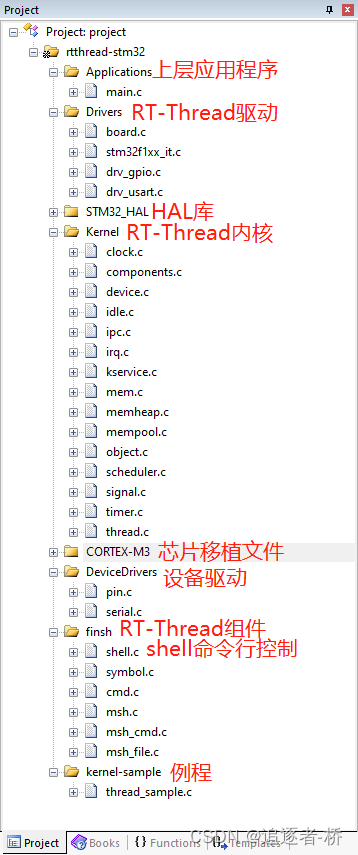
Project description
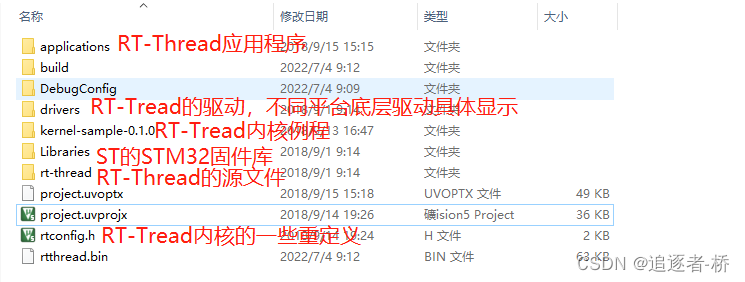
Debug command
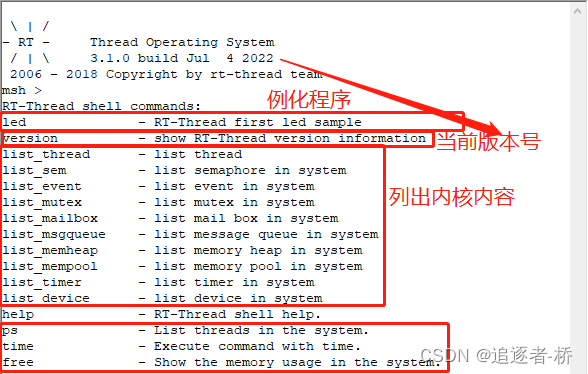
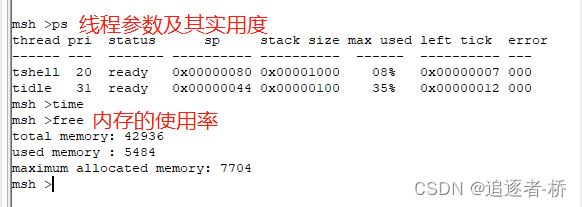
Open the debugging public and click Run (F5) Code , Open the serial port UART#1, Click on Tab Key or help+ enter , Check the commands supported by the system .
System startup steps
With MDK-ARM For example ,MDK-ARM The user program entry for is main() function , be located main.c In file . After the system starts, start from the assembly code startup_stm32f103xe.s Began to run , And then jump to C Code , Conduct RT-Thread System function initialization , Finally, enter the user program entry main().
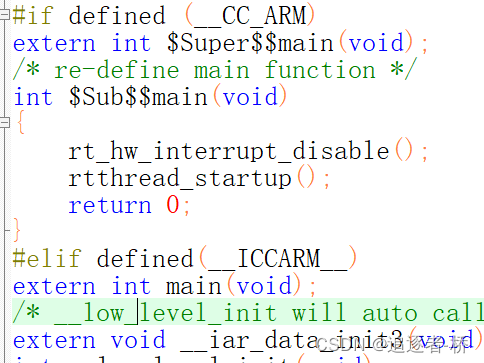
If used ARM The kernel redefines when it starts , Finally jumped to rtthread_startup(); yes RT-Thread Specified uniform start entry . The initialization of the startup program function is shown in the following figure :
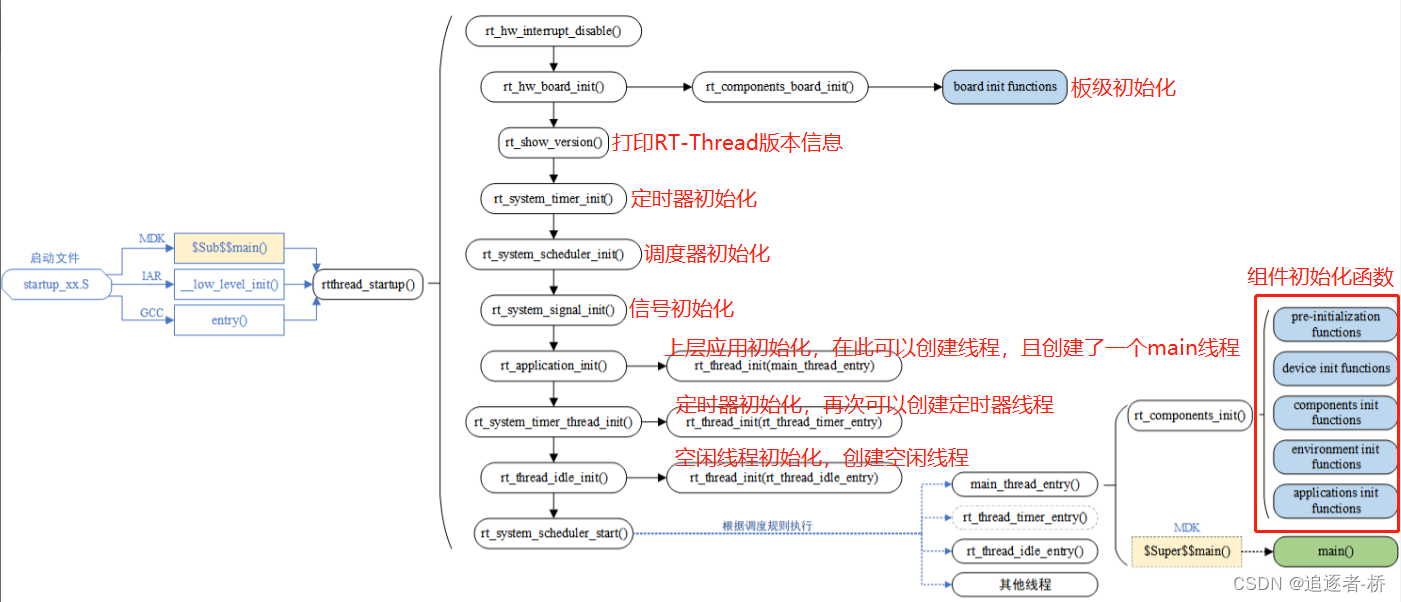
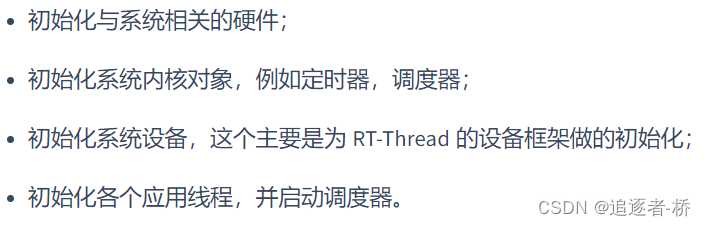
The startup code is divided into four parts :
User entry code
In order to enter main Before the program , Complete system function initialization , have access to $sub$$ and $super$$ The function identifier calls another routine before entering the main program. , This allows users to ignore main() Previous system initialization .
Kernel Foundation
Components of the kernel 、 How the system starts up 、 Memory distribution and kernel configuration method .

The implementation of real-time kernel includes : Object management 、 Thread management and scheduler 、 Inter thread communication management 、 Clock management and memory management, etc , The minimum resource usage of the kernel is 3KB ROM,1.2KB RAM.
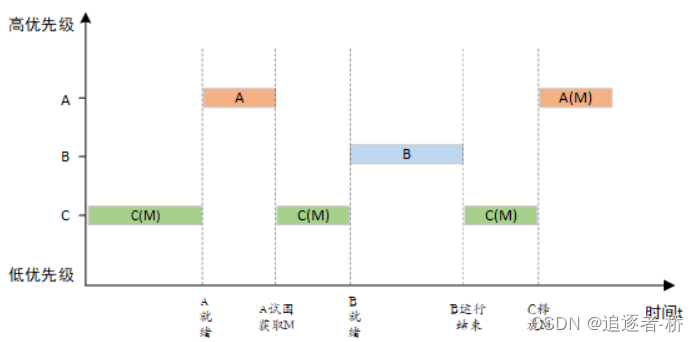
Thread scheduling
Thread is RT-Thread The smallest scheduling unit in the operating system , Thread scheduling algorithm is a priority based full preemptive multithreading scheduling algorithm , That is, in addition to Interrupt handling function 、 The code of the locking part of the scheduler and the code of prohibiting interruption It's beyond what can't be preempted , Other parts of the system can be preempted , Including the thread scheduler itself .
Clock management
RT-Thread Clock management is based on clock beat , The beat of the clock ( Tick always ) yes RT-Thread The smallest unit of clock in an operating system .RT-Thread The timer provides two types of timer mechanisms : The first category is Single trigger timer , This kind of timer will only trigger one timer event after starting , Then the timer stops automatically . The second type is Cycle triggered timer , This kind of timer will trigger timer events periodically , Until the user manually stops the timer, it will continue to execute forever .
in addition , According to the context in which the timeout function is executed ,RT-Thread The timer can be set to HARD_TIMER Mode or SOFT_TIMER Pattern .
Usually use timer timing callback function ( Timeout function ), Complete the scheduled service . Users choose the appropriate type of timer according to their real-time requirements for timing processing .
Synchronization between threads
RT-Thread Use semaphores 、 Mutex and event set achieve synchronization between threads . Thread through the semaphore 、 The acquisition and release of mutex are synchronized ; Mutex solves the common priority reversal problem in real-time system by priority inheritance , Semaphores can lead to thread blocking, that is, when low priority holds semaphores , High priority cannot get semaphore .
Inter thread communication
RT-Thread Support communication mechanisms such as mailbox and message queue . The length of a message in the mailbox is fixed as 4 Byte size ; Message queues can receive messages of variable length , And cache messages in your own memory space . Mailbox efficiency is more efficient than message queuing . The sending action of mailbox and message queue can be safely used in interrupt service routine . The communication mechanism supports threads to wait according to priority or obtain information in a first in first out manner .
memory management
RT-Thread Support static memory pool management and dynamic memory heap management . When the static memory pool has available memory , The time allocated by the system to memory blocks will be constant ; When the static memory pool is empty , The system suspends or blocks the thread applying for the memory block ( That is, if the thread does not get the memory block after waiting for a period of time, it will give up the application and return , Or return immediately . The waiting time depends on the waiting time parameter set when applying for a memory block ), When other threads release memory blocks to the memory pool , If there is a thread of pending memory block to be allocated , The system will wake up this thread .
The dynamic memory heap management module is used when the system resources are different , Respectively provided Memory management algorithm for small memory systems And For large memory systems SLAB Memory management algorithm .
There is also a dynamic memory heap management called memheap, It is applicable to the discontinuous memory heap with multiple addresses in the system . Use memheap Can be Multiple memory heaps “ Paste ” together , Let the user operate like operating a memory heap .
I/O Equipment management
RT-Thread take PIN、I2C、SPI、USB、UART As peripheral equipment , It is completed through device registration . The device management subsystem accessed by name is realized , According to the unified API Interface to access hardware devices . On the device driver interface , According to the characteristics of embedded system , Corresponding events can be attached to different devices . When a device event is triggered , The driver notifies the upper application .
Program memory distribution
commonly MCU The storage space included is : Intraslice Flash( Hard disk ) And on-chip RAM( Memory ). The compiler will classify a program into several parts , Store separately in MCU Different storage areas .
Keil After the compilation of the project , The corresponding program prompts to occupy space

- Code: Code segment , Store the code part of the program ;
- RO-data: Read only data segment , Store constants defined in the program ;
- RW-data: Read and write data segments , Store initialization to non 0 Global variable of value ;
- ZI-data:0 Data segment , Store uninitialized global variables and initialize to 0 The variable of ;
After compilation, the project will generate a .map file , It explains the size and address occupied by each function , The relationship between the last few lines of the document and the scene .
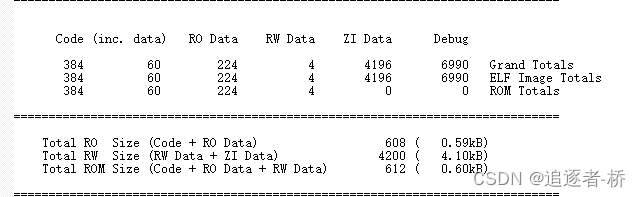
- RO Size Contains Code And RO-data, Indicates that the program occupies Flash The size of the space ;
- RW Size Contains RW-data And ZI-data, Represents the time occupied by the runtime RAM Size ;
- ROM Size Contains Code、RO-data as well as RW-data, Represents the time occupied by the burning program Flash The size of the space ;
STM32 After power on and start, the default is from Flash start-up , After startup, it will RW In paragraph RW-data( Initialized global variables ) Carry to RAM in , But not moving RO paragraph , namely CPU Execution code from Flash Read from , In addition, according to the compiler ZI Address and size allocation ZI paragraph , And put this RAM Area clear .

Application of dynamic memory :msg_ptr The pointer points to 128 The byte memory space is located in the dynamic memory heap space .

Some global variables are stored in RW Paragraph and ZI In the paragraph ,RW The segment stores global variables with initial values ( Global variables in the form of constants are placed in RO In the paragraph , Is read-only ),ZI The system uninitialized global variable stored in the segment .
Automatic initialization mechanism
The explicit initialization mechanism does not need to be called , It only needs to be declared in the way of macro definition at the function definition , Will be executed during system startup .


Kernel object model
Static and dynamic objects
Static kernel objects are usually placed in RW Paragraph and ZI In the paragraph , Initialize in the program after the system starts ;
Dynamic kernel objects are created from the memory heap , Then do initialization manually , Finally, you need to release .
Static objects take up RAM Space , Does not depend on the memory heap manager , Memory allocation time determination . Dynamic objects depend on the memory heap manager , Runtime request RAM Space , When an object is deleted , The amount of RAM Space is released . Both ways have their own advantages and disadvantages , You can choose the specific use mode according to the actual environmental needs .
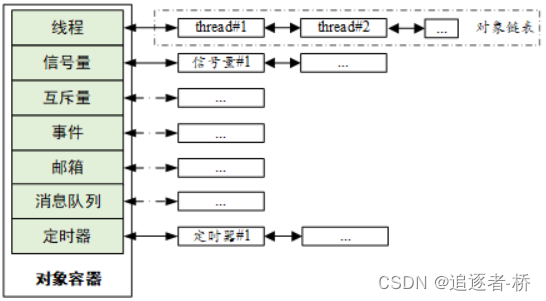
Kernel object management architecture
Static objects take up RAM Space , Does not depend on the memory heap manager , Memory allocation time determination . Dynamic objects depend on the memory heap manager , Runtime request RAM Space , When an object is deleted , The amount of RAM Space is released . Both ways have their own advantages and disadvantages , You can choose the specific use mode according to the actual environmental needs .
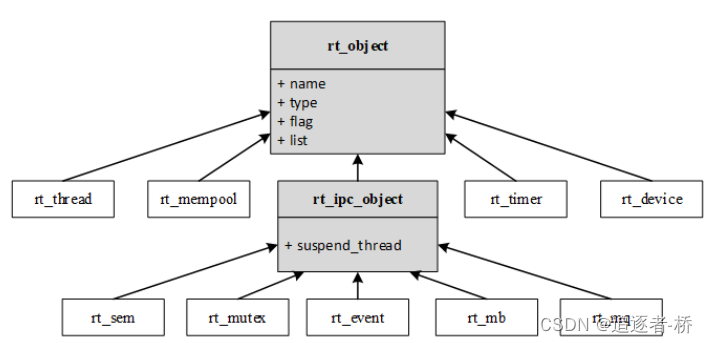
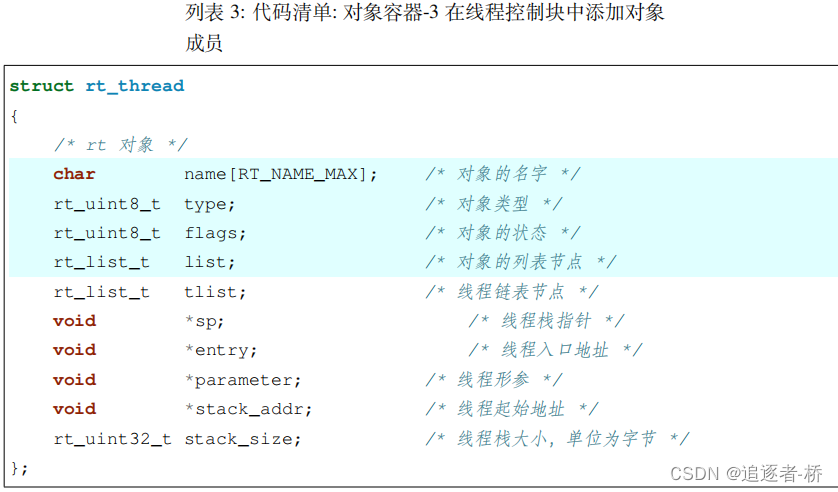
Object control block
struct rt_object
{
/* Kernel object name */
char name[RT_NAME_MAX];
/* Kernel object type */
rt_uint8_t type;
/* Parameters of kernel object */
rt_uint8_t flag;
/* Kernel object management linked list */
rt_list_t list;
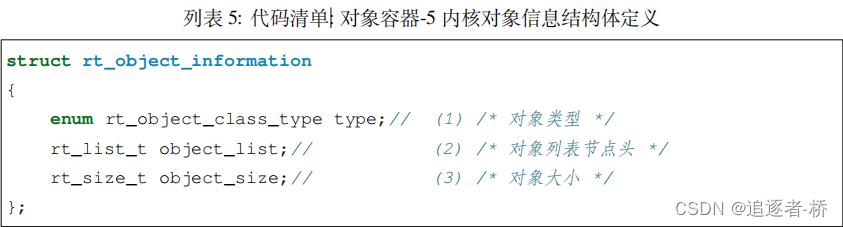
};struct rt_object_information
{
/* object type */
enum rt_object_class_type type;
/* Object linked list */
rt_list_t object_list;
/* Object size */
rt_size_t object_size;
};Traverse kernel objects
rt_thread_t thread = RT_NULL;
struct rt_list_node *node = RT_NULL;
struct rt_object_information *information = RT_NULL;
information = rt_object_get_information(RT_Object_Class_Thread);
rt_list_for_each(node, &(information->object_list))
{
thread = (rt_thread_t)rt_list_entry(node, struct rt_object, list);
/* For example, print all thread Name */
rt_kprintf("name:%s\n", thread->name);
}rt_mutex_t mutex = RT_NULL;
struct rt_list_node *node = RT_NULL;
struct rt_object_information *information = RT_NULL;
information = rt_object_get_information(RT_Object_Class_Mutex);
rt_list_for_each(node, &(information->object_list))
{
mutex = (rt_mutex_t)rt_list_entry(node, struct rt_object, list);
/* For example, print all mutex Name */
rt_kprintf("name:%s\n", mutex->parent.parent.name);
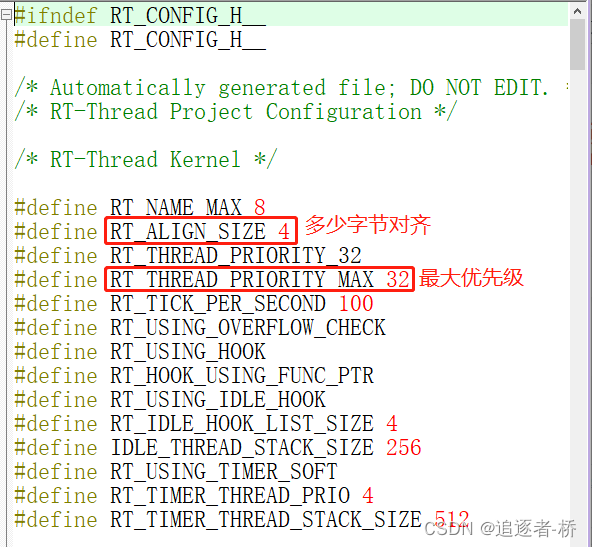
}Kernel configuration and tailoring
Configuration is mainly achieved by modifying rtconfig.h file To carry out , Users can open / Close the macro definition in the file to conditionally compile the code , Finally achieve the purpose of system configuration and tailoring
notes : in application , System profile rtconfig.h It is automatically generated by the configuration tool , No manual changes are required .
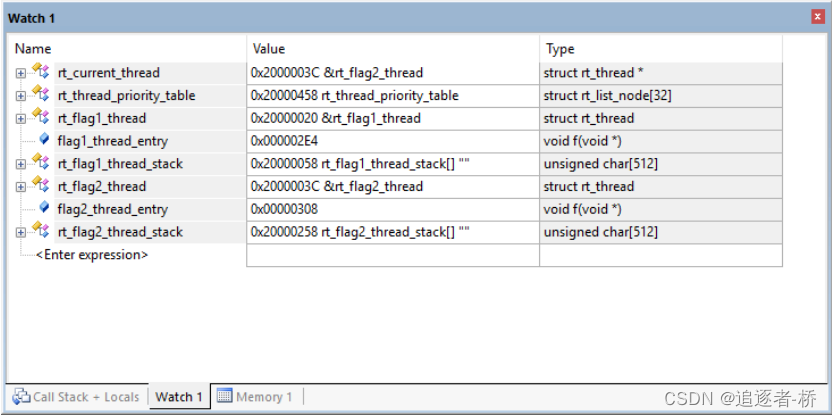
The first 8 Chapter Thread definition and thread switching
Define thread stack :

rt_uint8_t
ALIGN
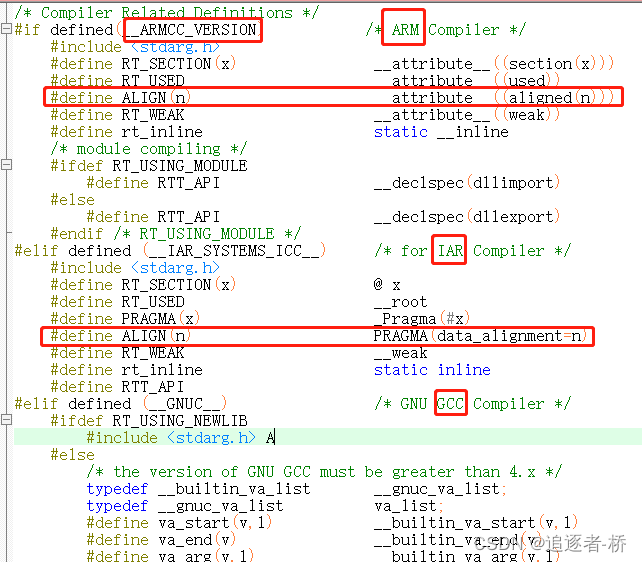
RT_ALIGN_SIZE
Please refer to the real-time manual for the composition of threads
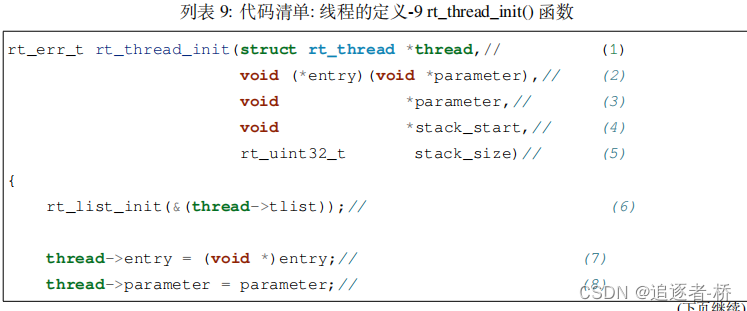
- follow RT-Thread Function naming rules in , In lowercase rt start , Indicates that this is an external function , Can be called by the user , With _rt The function at the beginning represents the internal function , Only by RT-Thread For internal use . Followed by the file name , Indicates which file the function is placed in , Finally, the function name .
- thread A thread is a pointer control block .
- entry Is the thread function name , Represents the entry of the thread .
- parameter Is a thread parameter , Used to pass thread parameters .
- stack_start Used to point to the starting address of the thread stack .
- stack_size Indicates the size of the thread stack , The unit is byte .
Linked list
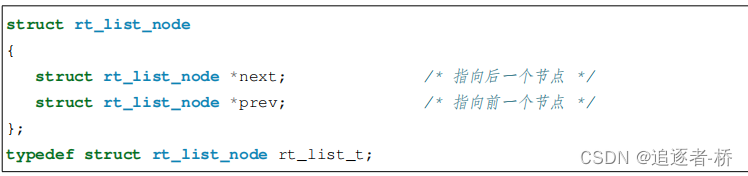

These functions are all in rtservice.h To realize ,rtservice.h For the first time, you need to use it on your own rtthread/3.0.3/include New under folder , Then add to the project rtt/source In the group .
- Initializing list nodes

- Insert a node after the header of the bidirectional linked list
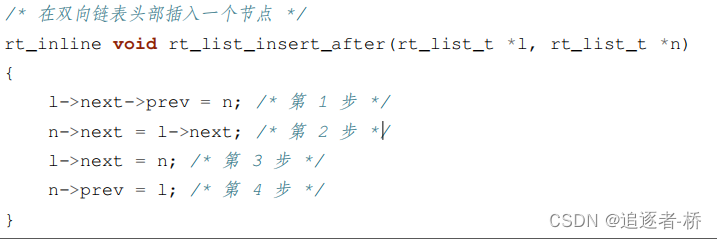

- Insert a node in front of the header of the bidirectional linked list
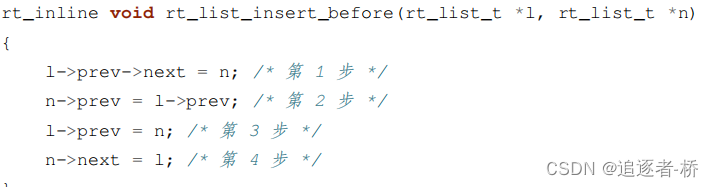

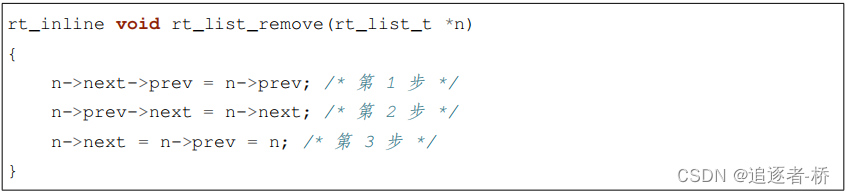
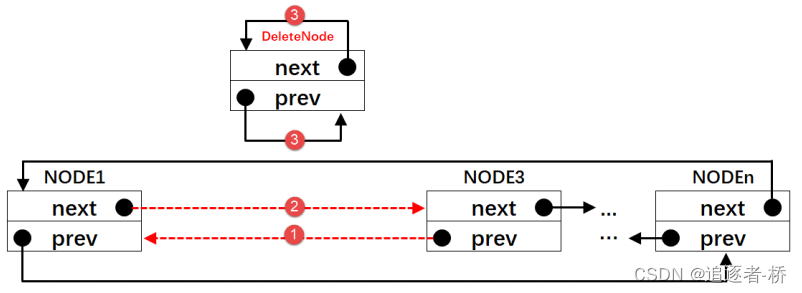
- Delete a node from the two-way linked list
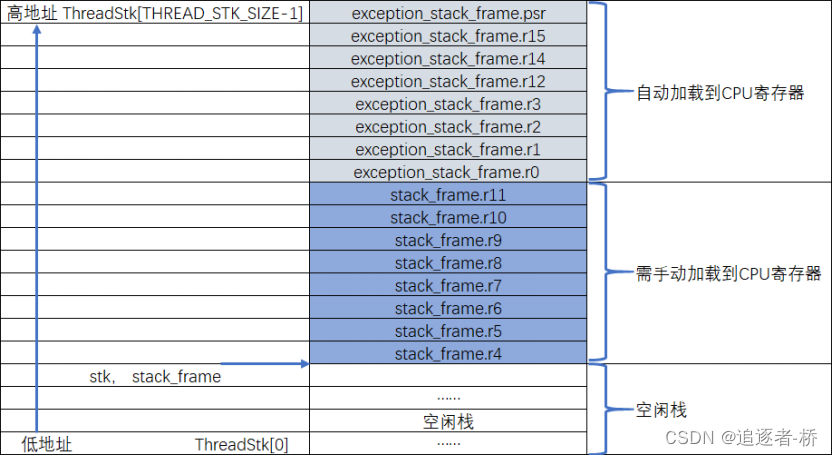
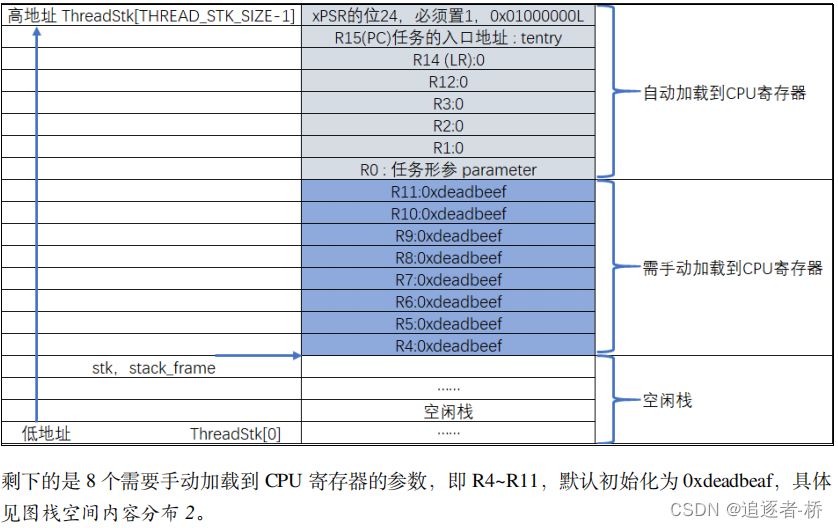
Thread stack initialization :rt_hw_stack_init() function

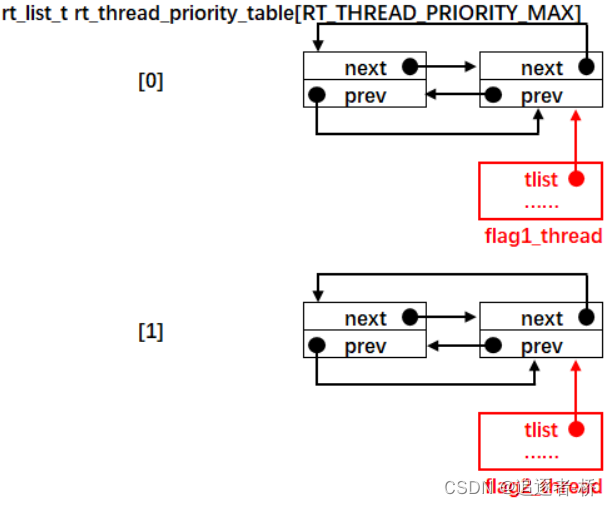
Insert the thread into the bidirectional ready list
After the thread is created , We need to Add the thread to the ready list , Indicates that the thread is ready , The system can schedule at any time . The ready list is scheduler.c In the definition of (scheduler.c The first use needs to be in rtthread3.0.3src New under the directory , Then add to the project rtt/source In the group ).

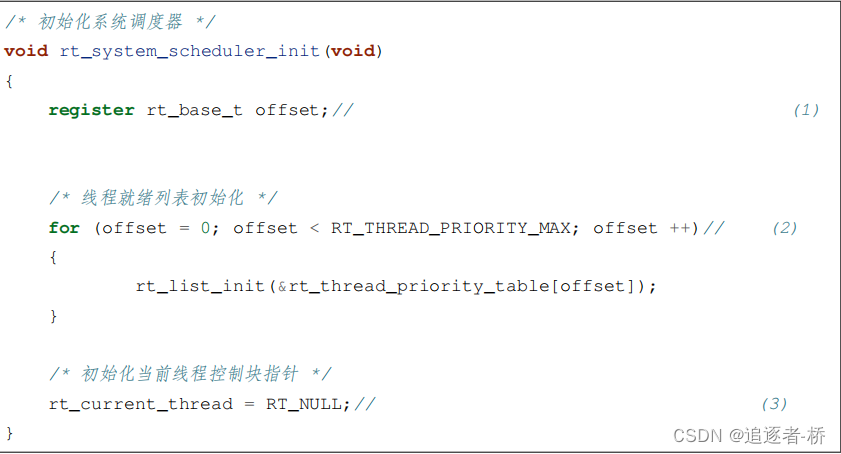
Implement the scheduler
Scheduler is the core of operating system , Its main function is to realize thread switching , That is, find the thread with the highest priority from the ready list , Then execute the thread . In terms of code , The scheduler is nothing more than a few global variables and some functions that can realize thread switching , All in scheduler.c Implementation in file .
The scheduler is started by the function rt_system_scheduler_start() To complete
System scheduling
System scheduling is to find the highest priority ready thread in the ready list , Then execute the thread . But at present, we don't Support priority , Only two threads can switch in turn , System scheduling function rt_schedule.
main function
Thread creation , Implementation of the ready list , The implementation of the scheduler has been finished , Now let's put all the test code into main.c Inside
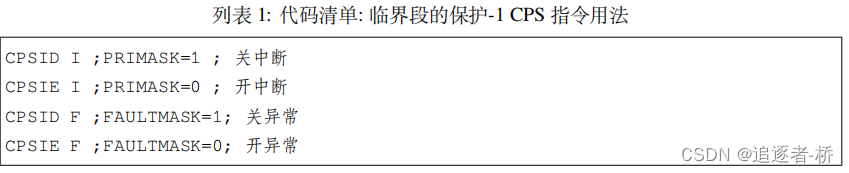
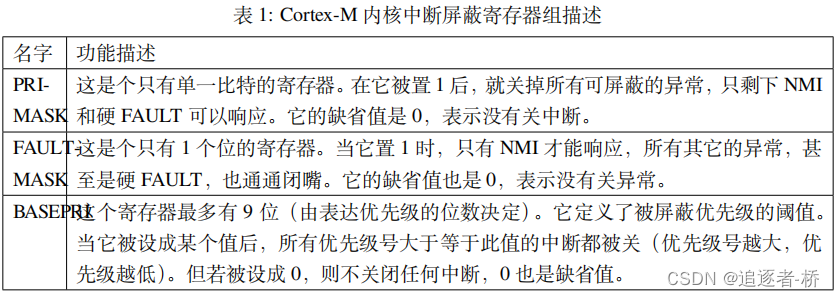
The first 9 Chapter Protection of critical section
The first 10 Chapter Implementation of object container
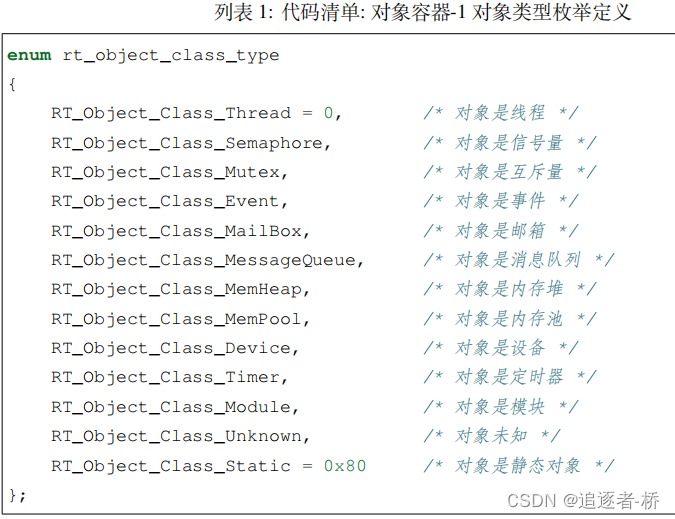

 stay rtt in , Whenever a user creates an object , Threads such as , This object will be placed in a place called container .
stay rtt in , Whenever a user creates an object , Threads such as , This object will be placed in a place called container .
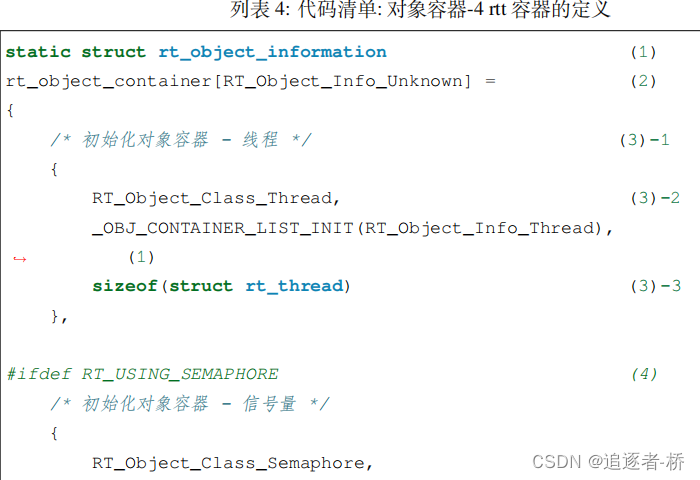
C language knowledge : If the member value of the enumeration type is not specified , Then the latter value is added to the previous member value 1.
边栏推荐
- One dimensional vector transpose point multiplication np dot
- Guess riddles (8)
- location search 属性获取登录用户名
- asp.net(c#)的货币格式化
- Programming implementation of subscriber node of ROS learning 3 subscriber
- Wheel 1:qcustomplot initialization template
- Run menu analysis
- [matlab] matlab reads and writes Excel
- MPSoC QSPI flash upgrade method
- 12. Dynamic link library, DLL
猜你喜欢

Lori remote control LEGO motor
How apaas is applied in different organizational structures
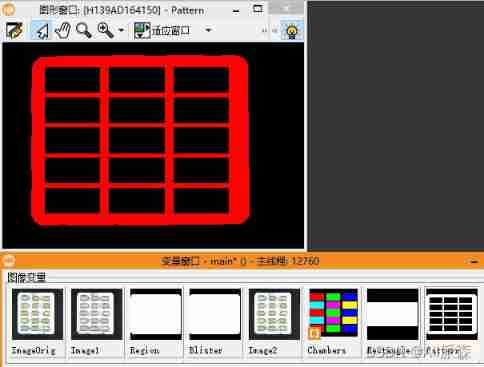
Halcon: check of blob analysis_ Blister capsule detection

Guess riddles (6)

Solutions of ordinary differential equations (2) examples
猜谜语啦(11)
微信H5公众号获取openid爬坑记
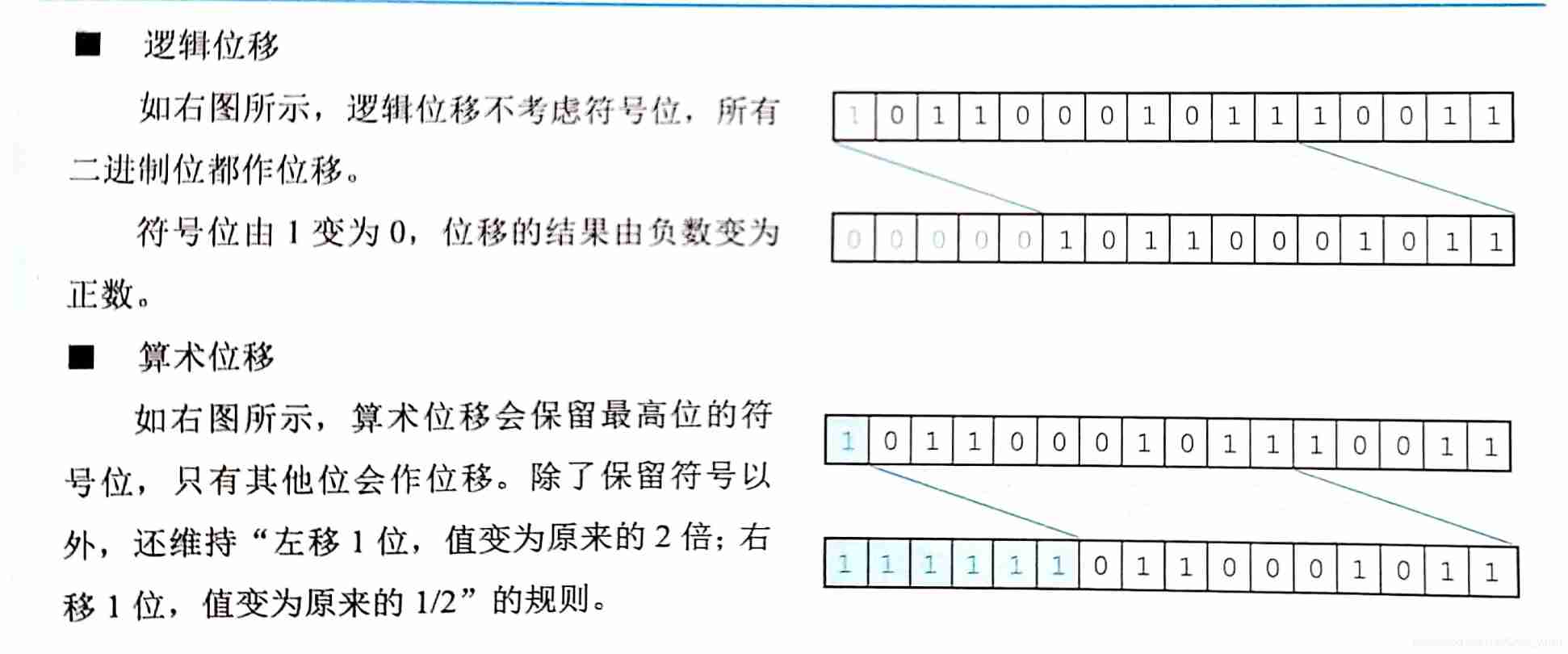
Shift operation of complement
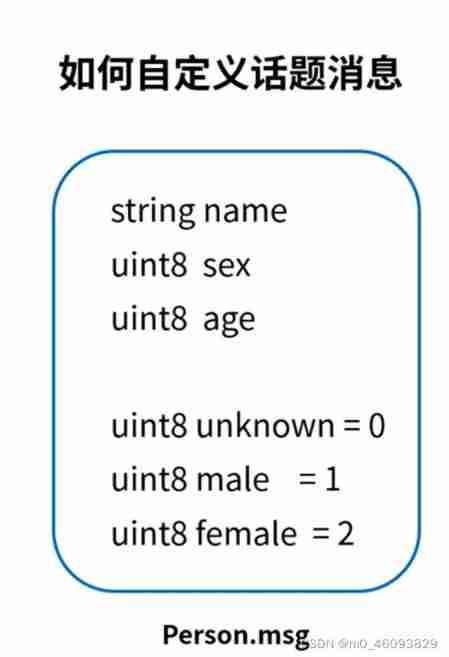
ROS learning 4 custom message

Pytorch entry record
随机推荐
kubeadm系列-01-preflight究竟有多少check
Guess riddles (3)
C语言标准函数scanf不安全的原因
Basic number theory - fast power
暑假第一周
Halcon blob analysis (ball.hdev)
Shift operation of complement
How many checks does kubedm series-01-preflight have
287. Looking for repeats - fast and slow pointer
Several problems to be considered and solved in the design of multi tenant architecture
Meta标签详解
Ros- learn basic knowledge of 0 ROS - nodes, running ROS nodes, topics, services, etc
Programming implementation of subscriber node of ROS learning 3 subscriber
【日常训练--腾讯精选50】557. 反转字符串中的单词 III
Ros-11 common visualization tools
EA introduction notes
Pytorch entry record
Count of C # LINQ source code analysis
MPSoC QSPI flash upgrade method
Warning: retrying occurs during PIP installation