当前位置:网站首页>[communication principle] Chapter 3 -- random process [i]
[communication principle] Chapter 3 -- random process [i]
2022-07-26 11:43:00 【Bald baby】
List of articles
The third chapter random process
The basic concept of stochastic process
- random process : It is a kind of process that changes randomly with time , He can't use the exact time function to describe
- Sample function : Each record of test results , Is a definite time function xi(t), It is called sample function
- The total of all sample functions {x1(t),x2(t) … xn(t)} It's a random process , Write it down as ξ(t), A random process is a set of all sample functions
- The random process can also be regarded as a set of random variables at different times in the time process
Distribution function of random process
- set up ξ(t) Represents a random process , At any moment of his life t1 Value ξ(t1) It's a random variable , Its statistical characteristics can be described by distribution function or probability density , The random variable ξ(t1) Less than or equal to a certain value x Probability P[ξ(t1) ≤ x1], Write it down as the following formula , And become a random process ξ(t) Of One dimensional distribution function
F 1 ( x 1 , t 1 ) = P [ ξ ( t 1 ) ≤ x 1 ] F_1(x_1, t_1) = P[ξ(t_1) ≤ x_1] F1(x1,t1)=P[ξ(t1)≤x1] - if F1(x1, t1) Yes x1 The partial derivative of exists , said f1(x1,t1) by ξ(t) One dimensional probability density function
∂ F 1 ( x 1 , t 1 ) ∂ x 1 = f 1 ( x 1 , t 1 ) \frac{∂F_1(x_1, t_1)}{∂x_1} = f_1(x_1, t_1) ∂x1∂F1(x1,t1)=f1(x1,t1)
The numerical characteristics of stochastic processes
mean value
- random process ξ(t) The mean or mathematical expectation of , Defined as
E [ ξ ( t ) ] = ∫ − ∞ ∞ x f 1 ( x , t ) d x E[ξ(t)] = \int_{-∞}^{∞}{xf_1(x, t)}dx E[ξ(t)]=∫−∞∞xf1(x,t)dx
variance
- Variance represents the random process at time t Relative to the mean a(t) The deviation process
X = > D x = E x 2 − [ E x ] 2 X => Dx = Ex^2 - [Ex]^2 X=>Dx=Ex2−[Ex]2
D [ ξ ( t ) ] = ∫ − ∞ ∞ x 2 f 1 ( x , t ) d x − [ a ( t ) ] 2 D[ξ(t)] = \int_{-∞}^{∞}{x^2f_1(x, t)}dx - [a(t)]^2 D[ξ(t)]=∫−∞∞x2f1(x,t)dx−[a(t)]2
Correlation function
- The correlation function is much like the degree of correlation between random variables obtained by a random process at any two times
- The larger the correlation function => The greater the degree of correlation at any two moments
- random process ξ(t) The correlation function of -> Autocorrelation
R ( t 1 , t 2 ) = E [ ξ ( t 1 ) ξ ( t 2 ) ] = ∫ − ∞ ∞ ∫ − ∞ ∞ x 1 x 2 f 2 ( x 1 , x 2 ; t 1 , t 2 ) d x 1 d x 2 R(t_1, t_2) = E[ξ(t_1)ξ(t_2)] = \int_{-∞}^{∞}\int_{-∞}^{∞}{x_1x_2f_2(x_1, x_2; t_1, t2)}dx_1dx_2 R(t1,t2)=E[ξ(t1)ξ(t2)]=∫−∞∞∫−∞∞x1x2f2(x1,x2;t1,t2)dx1dx2 - The concept of correlation function is extended to two or more random processes , You can get the cross-correlation function
Stationary random process
Definition
- If a random process ξ(t) The statistical properties of are independent of the starting point of time , That is, time translation does not affect any of its statistical properties , The random process is said to be in a strict sense Stationary random process , abbreviation Strictly stationary stochastic process
- Stationary random process ξ(t) In any finite dimension, the probability density function is independent of the time starting point
- For any positive integer n And all real numbers Δ, One dimensional probability density function and time t irrelevant
f 1 ( x 1 , t 1 ) = f 1 ( x 1 ) f_1(x_1, t_1) = f_1(x_1) f1(x1,t1)=f1(x1) - The two-dimensional distribution function is only related to the time interval τ = t2 - t1 of
f 2 ( x 1 , x 2 ; t 1 , t 2 ) = f 2 ( x 1 , x 2 ; τ ) f_2(x_1, x_2; t_1, t_2) = f_2(x_1, x2; τ) f2(x1,x2;t1,t2)=f2(x1,x2;τ)
- Stationary random process ξ(t) It has concise numerical characteristics
- Mean and t irrelevant , Constant a
- The autocorrelation function is only related to the time interval τ = t2 - t1 of
- The above two conditions are often used to directly judge the stationarity of stochastic processes
- And the process that meets the above two conditions at the same time is defined as Generalized stationary stochastic process ( Wide stationary stochastic process )
- Strictly stationary stochastic processes must be generalized stationary , On the contrary, it is not necessarily
Ergodicity of all States
- Ergodic process , Its numerical characteristics ( Are statistical average ) It can be completely replaced by the time average of any realization in the random process
- The meaning of ergodicity of States : Any time in the random process realizes all possible states of the random process
- Be careful :
- A random process with ergodicity of States must be a stationary process , On the contrary, it is not necessarily true
- Random signal and noise encountered in communication system , Generally, it can satisfy the ergodic condition of all States
Important formula
- hypothesis x(t) It's a smooth journey ξ(t) Any implementation of ( sample ), Because it is a definite function of time , You can get his time average , Its time mean and time correlation function are defined as
{ a ‾ = x ( t ) ‾ = lim T → ∞ 1 T ∫ − T 2 T 2 x ( t ) d t R ( τ ) ‾ = x ( t ) x ( t + τ ) ‾ = lim T → ∞ 1 T ∫ − T 2 T 2 x ( t ) x ( t + τ ) d t \left\{ \begin{aligned} \overline{a} = \overline{x(t)} = \lim_{T\to∞}\frac{1}{T}\int_{-\frac{T}{2}}^{\frac{T}{2}}{x(t)}dt\\ \overline{R(τ)} = \overline{x(t)x(t+τ)} = \lim_{T\to∞}\frac{1}{T}\int_{-\frac{T}{2}}^{\frac{T}{2}}{x(t)x(t+τ)}dt \end{aligned} \right. ⎩⎨⎧a=x(t)=T→∞limT1∫−2T2Tx(t)dtR(τ)=x(t)x(t+τ)=T→∞limT1∫−2T2Tx(t)x(t+τ)dt
{ a = a ‾ R ( τ ) = R ( τ ) ‾ \left\{ \begin{aligned} a = \overline{a}\\ R(τ) = \overline{R(τ)} \end{aligned} \right. { a=aR(τ)=R(τ)
Autocorrelation function of stationary process
- Autocorrelation function is a particularly important function to express the characteristics of stationary processes , It can not only be used to describe the numerical characteristics of stationary processes , It is also intrinsically related to the spectral characteristics of stationary processes
- set up ξ(t) Is a real stationary random process , Then its autocorrelation function
R ( τ ) = E [ ξ ( t ) ξ ( t + τ ) ] R(τ) = E[ξ(t)ξ(t+τ)] R(τ)=E[ξ(t)ξ(t+τ)] - The main properties :
- R(0) = E[ξ2(t)], Express ξ(t) Of Average power
- R(τ) = R(-τ), Express τ Even function of
- R(∞) = E2[ξ(t)] = a2, Express ξ(t) Of DC power
- R(0) - R(∞) = σ2,σ2 Is variance , Represents a stationary process ξ(t) Of AC power
Power spectral density of stationary process
- The spectral characteristics of random process can be expressed by its power spectral density , Any sample in the random process is a certain power type signal , For any definite power signal x(t), Its power spectral density is defined as
P x ( f ) = lim T → ∞ ∣ X T ( f ) ∣ 2 T P_x(f) = \lim_{T\to∞}{\frac{|X_T(f)|^2}{T}} Px(f)=T→∞limT∣XT(f)∣2 - ++ Power spectral density of stationary process Pξ(f) Its autocorrelation function R(τ) It is also a pair of Fourier transform relations ++
{ P ξ ( ω ) = ∫ − ∞ ∞ R ( τ ) e − j ω τ d t R ( τ ) = 1 2 π ∫ − ∞ ∞ P ξ ( ω ) e j ω τ d ω \left\{ \begin{aligned} P_ξ(ω) = \int_{-∞}^{∞}{R(τ)e^{-jωτ}}dt\\ R(τ) = \frac{1}{2π}\int_{-∞}^{∞}{P_ξ(ω)e^{jωτ}}dω \end{aligned} \right. ⎩⎨⎧Pξ(ω)=∫−∞∞R(τ)e−jωτdtR(τ)=2π1∫−∞∞Pξ(ω)ejωτdω
or
{ P ξ ( f ) = ∫ − ∞ ∞ R ( τ ) e − j ω τ d t R ( τ ) = 1 2 π ∫ − ∞ ∞ P ξ ( f ) e j ω τ d f \left\{ \begin{aligned} P_ξ(f) = \int_{-∞}^{∞}{R(τ)e^{-jωτ}}dt\\ R(τ) = \frac{1}{2π}\int_{-∞}^{∞}{P_ξ(f)e^{jωτ}}df \end{aligned} \right. ⎩⎨⎧Pξ(f)=∫−∞∞R(τ)e−jωτdtR(τ)=2π1∫−∞∞Pξ(f)ejωτdf
Gaussian random process
- Gauss process , Also known as normal random process , It is the most important and common process in the field of communication
Definition
- If the random process ξ(t) Arbitrarily n The dimensional distribution obeys the normal distribution , It is called normal process or Gaussian process
Important nature
- Gaussian process n Dimensional distribution only depends on the mean value of each random variable 、 Variance and normalized covariance
- therefore , Just study its digital characteristics
- Generalized stationary Gaussian processes are also strictly stationary
- If the value of Gaussian process at different times is irrelevant , Then they are also statistically independent
- The process generated by Gaussian process after linear transformation is still Gaussian process
- If the input of a linear system is a Gaussian process , Then the system output is also a Gaussian process
Gaussian random variables
- The value of Gaussian process at any time is a random variable with normal distribution , Also known as Gaussian random variable , Its one-dimensional probability density function is
f ( x ) = 1 2 π σ e − ( x − a ) 2 2 σ 2 f(x) = \frac{1}{\sqrt{2π}σ}e^{-\frac{(x-a)^2}{2σ^2}} f(x)=2πσ1e−2σ2(x−a)2 - characteristic
- f(x) Symmetrical to x = a This line , namely f(a+x) = f(a-x)
- ∫ − ∞ ∞ f ( x ) d x = 1 And ∫ − ∞ a f ( x ) d x = ∫ a ∞ f ( x ) d x = 1 2 \int_{-∞}^{∞}f(x)dx = 1 And \int_{-∞}^{a}f(x)dx = \int_{a}^{∞}f(x)dx = \frac{1}{2} ∫−∞∞f(x)dx=1 And ∫−∞af(x)dx=∫a∞f(x)dx=21
- a Represents the distribution center ,σ It is called standard deviation , Indicates the degree of concentration ,f(x) The graph will follow σ Become higher and narrower with the decrease of
- skill
- P ( x > A ) = 1 2 e r f c d 1 2 2 σ 2 P(x > A) = \frac{1}{2}erfc\sqrt{\frac{d_1^2}{2σ^2}} P(x>A)=21erfc2σ2d12
- P ( x < B ) = 1 2 e r f c d 2 2 2 σ 2 P(x < B) = \frac{1}{2}erfc\sqrt{\frac{d_2^2}{2σ^2}} P(x<B)=21erfc2σ2d22
- P ( a < x < A ) = 1 2 − 1 2 e r f c d 1 2 2 σ 2 P(a < x < A) = \frac{1}{2} - \frac{1}{2}erfc\sqrt{\frac{d_1^2}{2σ^2}} P(a<x<A)=21−21erfc2σ2d12
- { d 1 = A − a d 2 = a − B \left\{\begin{aligned}d_1 = A - a\\d_2 = a - B\end{aligned}\right. { d1=A−ad2=a−B
Stationary stochastic processes pass through linear systems
- Linear time invariant systems can be characterized by their unit impulse response h(t) Or its frequency response H(f) characterization , If order vi Is the input signal ,v0 For the output signal , Then the relationship between input and output can be expressed as convolution
v 0 ( t ) = v i ( t ) ∗ h ( t ) = ∫ − ∞ ∞ v i ( τ ) h ( t − τ ) d τ v_0(t) = v_i(t) * h(t) = \int_{-∞}^{∞}{v_i(τ)h(t-τ)}dτ v0(t)=vi(t)∗h(t)=∫−∞∞vi(τ)h(t−τ)dτ
or
v 0 ( t ) = h ( t ) ∗ v i ( t ) = ∫ − ∞ ∞ h ( τ ) v i ( t − τ ) d τ v_0(t) = h(t) * v_i(t) = \int_{-∞}^{∞}{h(τ)v_i(t-τ)}dτ v0(t)=h(t)∗vi(t)=∫−∞∞h(τ)vi(t−τ)dτ
The corresponding Fourier transform relation is
V 0 ( t ) = H ( f ) V i ( f ) V_0(t) = H(f)V_i(f) V0(t)=H(f)Vi(f)
nature
- Output process ξo(t) The average of E[ξo(t)] It's a constant
E [ ξ o ( t ) ] = a ⋅ ∫ − ∞ ∞ h ( τ ) d τ = a ⋅ H ( 0 ) E[ξ_o(t)] = a · \int_{-∞}^{∞}{h(τ)}dτ = a · H(0) E[ξo(t)]=a⋅∫−∞∞h(τ)dτ=a⋅H(0) - Output process ξo(t) The autocorrelation function of
- If the input process of a linear system is stable , Then the output process is also stable
- Output process ξo(t) Power spectral density
- The power spectral density of the output process is the power spectral density of the input process multiplied by the square of the system efficiency response
- Output process ξo(t) Probability distribution of
- If the input process of a linear system is Gaussian , Then the output process of the system is also Gaussian
- The process of Gaussian process after linear transformation is still Gaussian process
边栏推荐
- Three properties of concurrency
- 如何使用数据管道实现测试现代化
- 10 reduce common "tricks"
- 4.1 配置Mysql与注册登录模块
- 36. [difference between const function and function]
- 10 个 Reduce 常用“奇技淫巧”
- Mlx90640 infrared thermal imager temperature sensor module development notes (6)
- 大咖观点+500强案例,软件团队应该这样提升研发效能!
- 数据库组成存储引擎
- Didi was fined 8billion! The era of making money from user data is over
猜你喜欢

微服务化解决文库下载业务问题实践

了解 useRef 一篇就够了

Pyechart离线部署

Leetcode / Scala - sum of two numbers, three numbers, four numbers, and N numbers

Caused by: scala. MatchError: None (of class scala.None$)
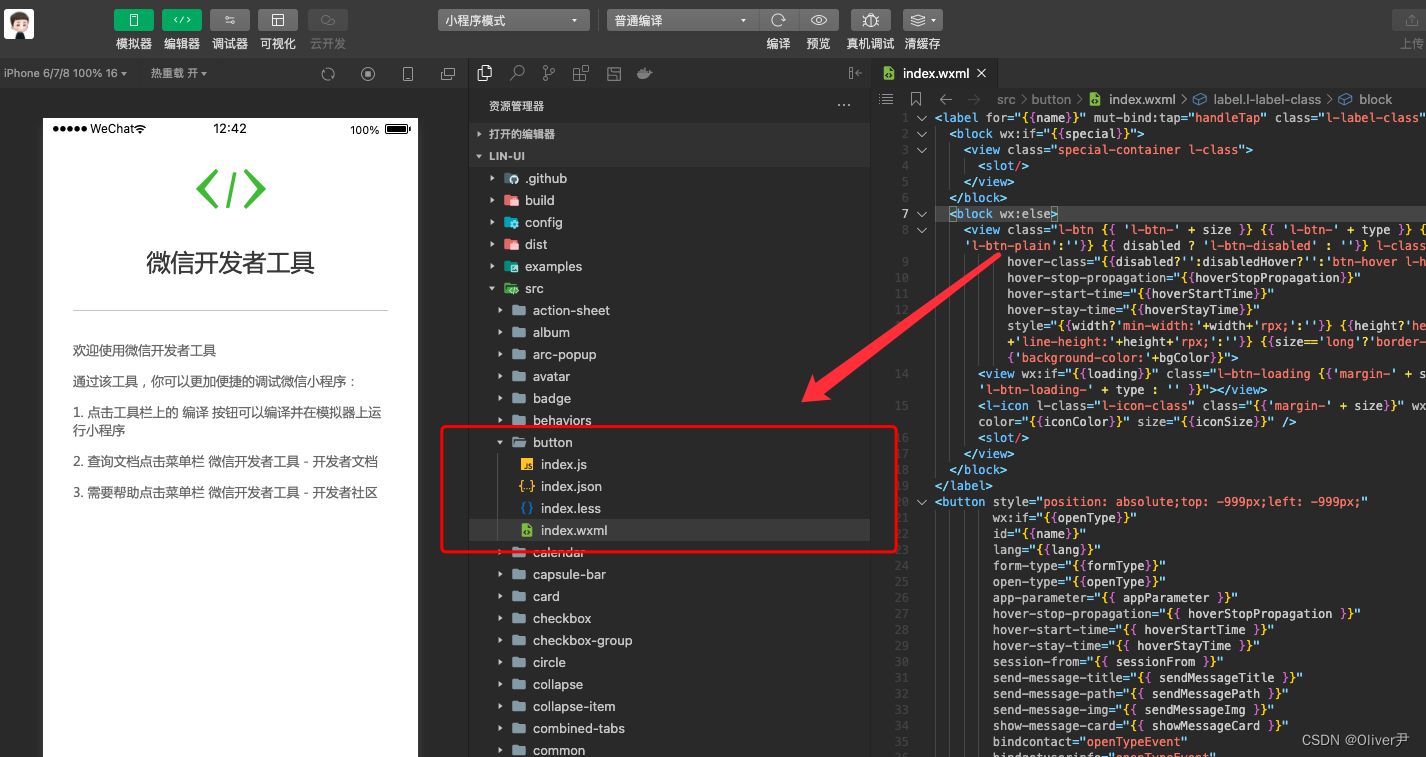
Wechat applet - Advanced chapter Lin UI component library source code analysis button component (I)

Record errors encountered by individuals

3dunity game project actual combat - aircraft war

3.1 创建菜单与游戏页面——上
梅科尔工作室-华为14天鸿蒙设备开发实战笔记八
随机推荐
Swagger2.9.2 tutorial and swagger3.0.0 tutorial
Modeling essay series 151 SCLC engineering experiment 4-sclc object
Preliminary test yolov7
系统调用捕获和分析完结篇制作系统调用日志收集系统
浅谈VIO之IMU预积分(还是刚入门时的想法)
Acwing727.菱形图案
系统调用捕获和分析—Ring0层kprobe劫持系统调用
Caused by: scala. MatchError: None (of class scala.None$)
3.1 创建菜单与游戏页面——上
数据库组成 触发器
Several ways of communication between threads
建模杂谈系列150 SCLC工程化实验3-SRule
数据库组成存储引擎
PostgreSQL in Linux and windows installation and introductory basic tutorial
3.2 创建菜单与游戏页面(下)
数据库组成索引和约束
。。。。。。
一步一步入门使用g2o解决ICP问题-估计有匹配关系的两组3维点集之间的变换关系
[vscode]如何远程连接服务器
Rigorous proof of Behrman's expectation equation