当前位置:网站首页>ROS packages visualization
ROS packages visualization
2022-08-04 21:32:00 【moneymyone】
ROSInformation package visual
文章目录
1. 循环播放rosbag
A terminal to startroscore
roscore
Another terminal playrosbag
rosbag play 2022-01-24.bag -l
rosbag play 2022-01-24.bag -l
[ INFO] [1656915294.661470192]: Opening 2022-01-24.bag
Waiting 0.2 seconds after advertising topics... done.
Hit space to toggle paused, or 's' to step.
[RUNNING] Bag Time: 1517156370.912962 Duration: 2.746406 / 2.873530
2.rviz打开
点击Add->添加topic
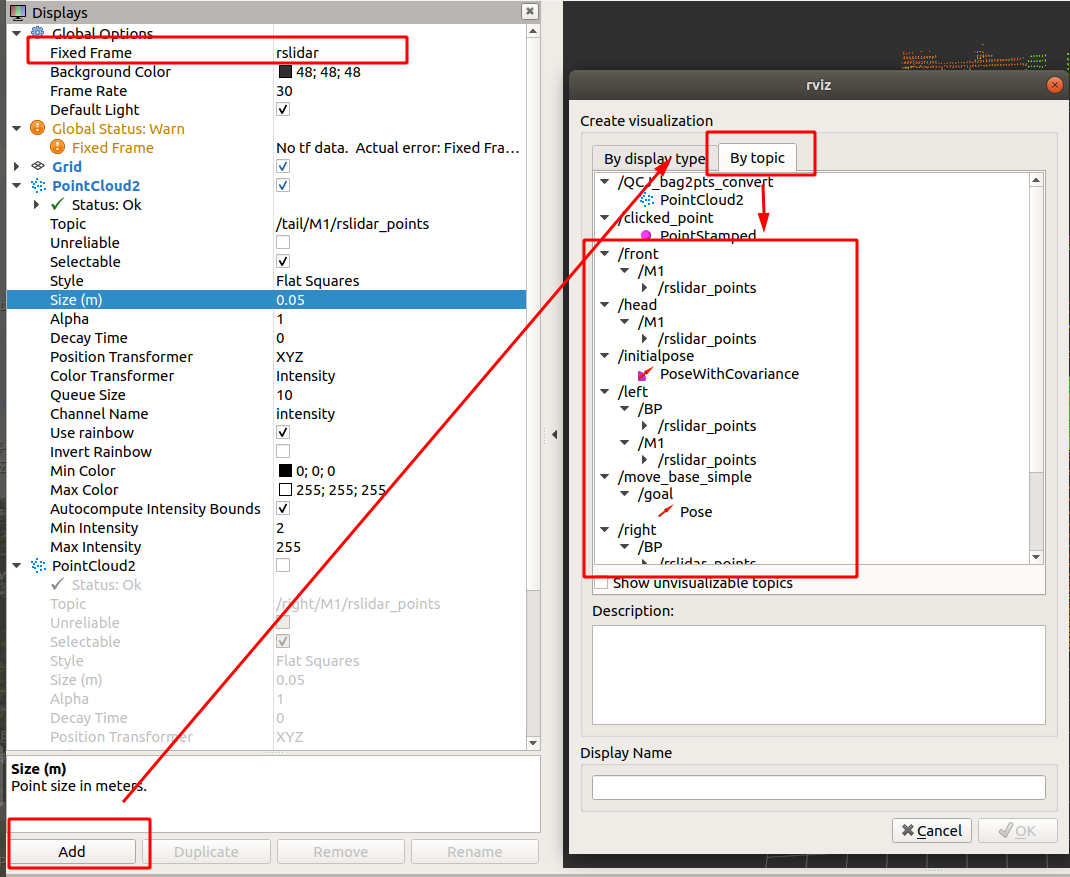
会显示fixed frame不正确,来看看该rosbag包中frame_id是什么,And what is defined as?
查看rosbag对应topic的fixed frame
[email protected]:~$ rostopic echo /front/M1/rslidar_points | grep frame_id
frame_id: "/rslidar"
frame_id: "/rslidar"
frame_id: "/rslidar"
frame_id: "/rslidar"
frame_id: "/rslidar"
Fixed Frame
The Fixed Frame/固定参考系
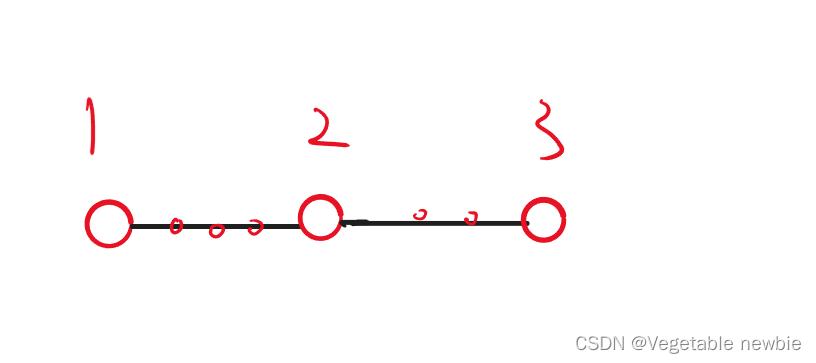
The more-important of the two frames is the fixed frame. The fixed frame is the reference frame used to denote the “world” frame. This is usually the “map”, or “world”, or something similar, but can also be, for example, your odometry frame.
If the fixed frame is erroneously set to, say, the base of the robot, then all the objects the robot has ever seen will appear in front of the robot, at the position relative to the robot at which they were detected.
For correct results, the fixed frame should not be moving relative to the world.
If you change the fixed frame, all data currently being shown is cleared rather than re-transformed.
The Target Frame
The target frame is the reference frame for the camera view. For example, if your target frame is the map, you’ll see the robot driving around the map. If your target frame is the base of the robot, the robot will stay in the same place while everything else moves relative to it.
消息的头std_msgs/Header headerTypically this information.
Standard header information mainly include:
seqIs a message in the order of logo,不需要手动设置,Published nodes in the news,会自动累加.timestampIs the message that is associated with the data of the time stamp,The laser data, for example,Timestamp corresponding laser data collection point in time.frame_idIs the message that is associated with the data of the reference frameid,For example in the laser data,frame_idCorresponding to the laser data acquisition reference.
例如LaserScan消息结构:
std_msgs/Header header # Standard header information
uint32 seq
time stamp
string frame_id # in frame frame_id, angles are measured around the positive Z axis (counterclockwise, if Z is up) with zero angle being forward along the x axis
float32 angle_min # start angle of the scan [rad]
float32 angle_max # end angle of the scan [rad]
float32 angle_increment # angular distance between measurements [rad]
float32 time_increment # time between measurements [seconds] - if your scanner
# is moving, this will be used in interpolating position of 3d points
float32 scan_time # time between scans [seconds
float32 range_min # minimum range value [m]
float32 range_max # maximum range value [m]
float32[] ranges # range data [m] (Note: values < range_min or > range_max should be discarded)
float32[] intensities # intensity data [device-specific units]. If your device does not provide intensities, please leave the array empty.
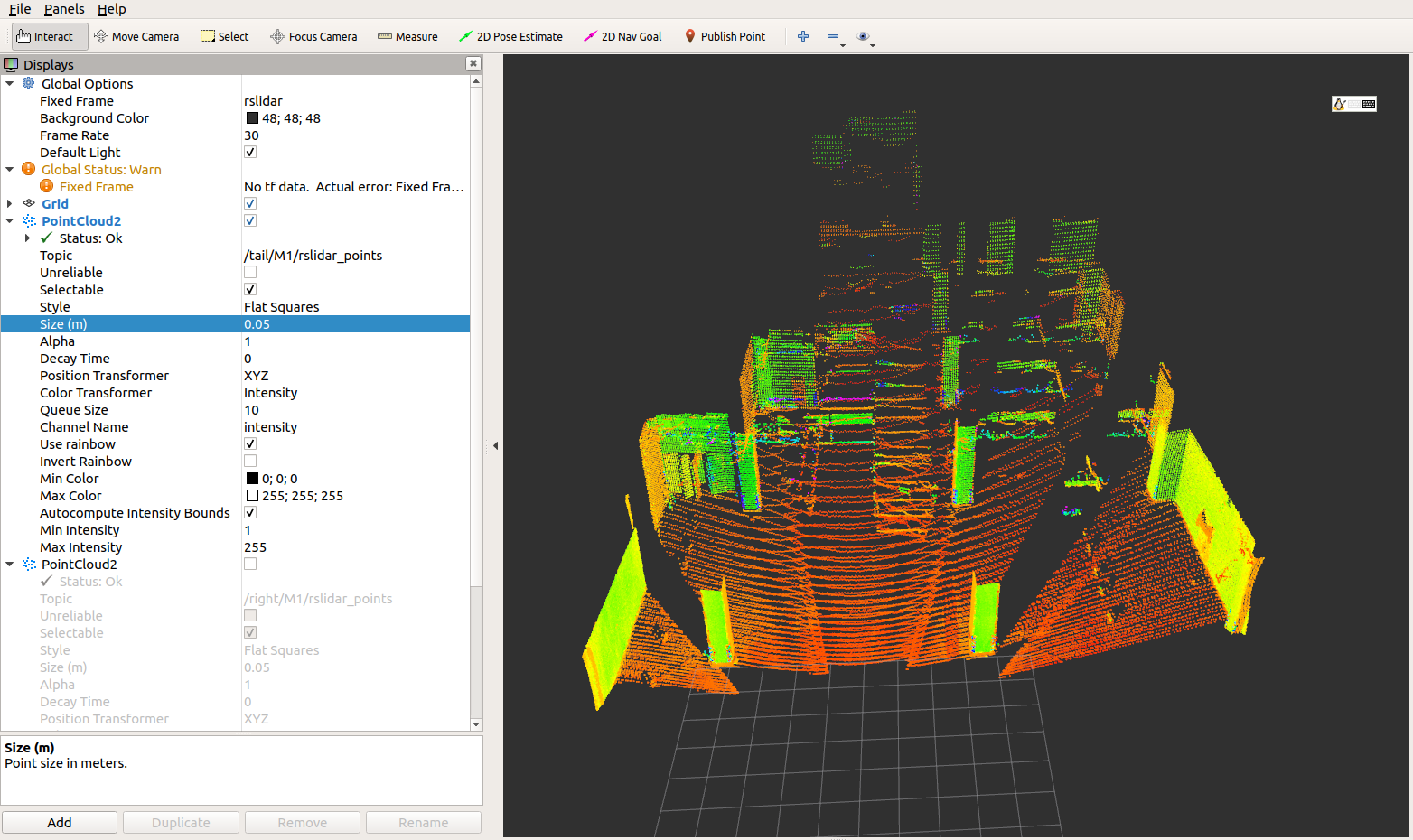
修改为正确的frame_id, Then can display properly:
Code to broadcast
#include "ros/ros.h"
#include"std_msgs/Int32.h"
#include <iostream>
int main(int argc, char **argv)
{
ros::init(argc, argv, "demo_topic_publisher");
ros::NodeHandle node_obj;
ros::Publisher number_publisher = node_obj.advertise<std_msgs::Int32>("/numbers",10); // topic
ros::Rate loop_rate(10);
int number_count = 0;
while(ros::ok()) {
std_msgs::Int32 msg;
msg.data = number_count;
ROS_INFO("%d",msg.data);
number_publisher.publish(msg);
ros::spinOnce();
loop_rate.sleep();
++number_count;
}
return 0;
}
rosWould a live Numbers
[ INFO] [1657537136.415226386]: 977
[ INFO] [1657537136.515237562]: 978
[ INFO] [1657537136.615177688]: 979
[ INFO] [1657537136.715232163]: 980
[ INFO] [1657537136.815237120]: 981
[ INFO] [1657537136.915179913]: 982
[ INFO] [1657537137.015181264]: 983
[ INFO] [1657537137.115259284]: 984
查看topic及信息
$ rostopic list
/clock
/numbers
/points_raw
/pose
/rosout
/rosout_agg
$ rostopic echo /numbers
data: 388
---
data: 389
---
data: 390
---
data: 391
---
data: 392
---
data: 393
---
Reference
- http://wiki.ros.org/rviz/UserGuide#Coordinate_Frames
- The frame_id in a message specifies the point of reference for data contained in that message: https://blog.csdn.net/xu_fengyu/article/details/86562827
边栏推荐
猜你喜欢
Codeforces Round #811 (Div. 3)

用Tesseract开发一个你自己的文字识别应用
搬走地下空间开发利用“绊脚石” 中地数码取得地下空间透明化技术突破

stm32mp157系统移植 | 移植ST官方5.10内核到小熊派开发板
基于 Milvus 和 ResNet50 的图像搜索(部署及应用)
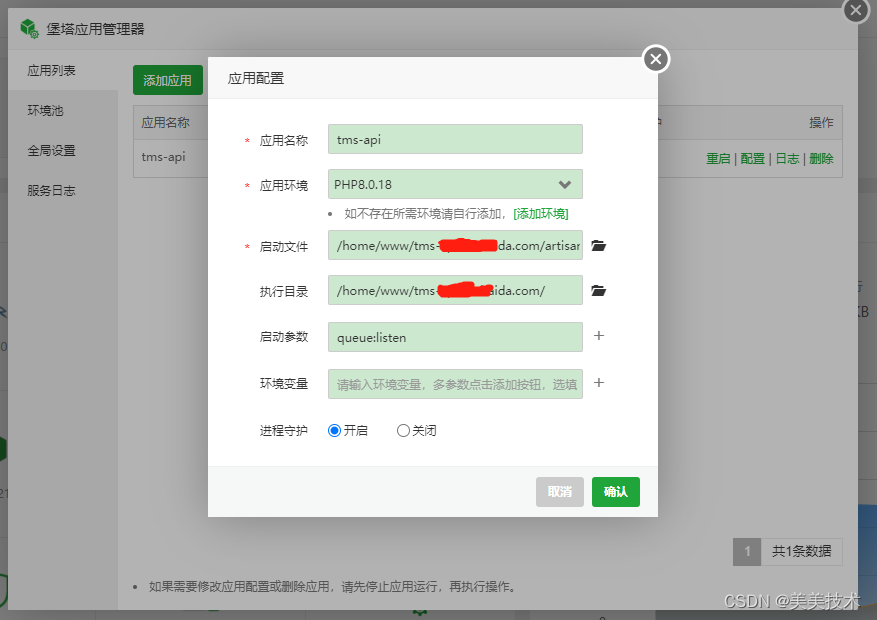
使用堡塔应用管理器配置laravel队列方法
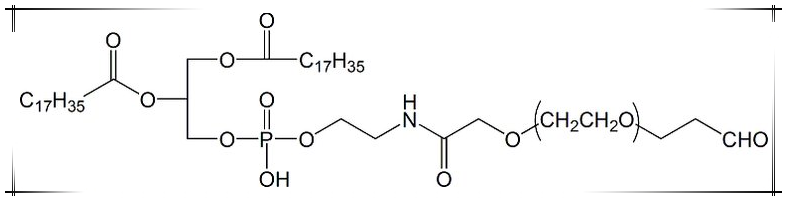
DSPE-PEG-Aldehyde, DSPE-PEG-CHO, Phospholipid-Polyethylene Glycol-Aldehyde A hydrophobic 18-carbon phospholipid

laravel whereDoesntHave
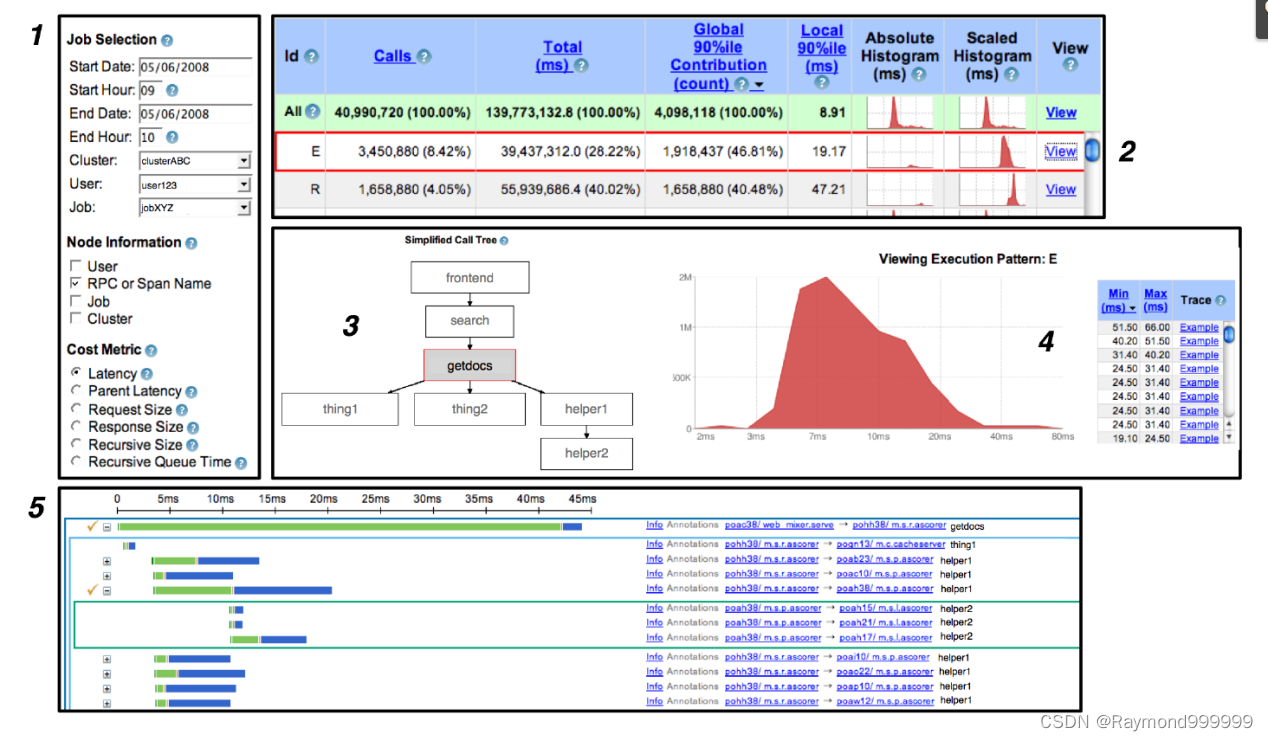
y87.第五章 分布式链路追踪系统 -- 分布式链路追踪系统起源(一)
ue unreal 虚幻 高分辨率无缩放 编辑器字太小 调整编辑器整体缩放
随机推荐
Data warehouse (1) What is data warehouse and what are the characteristics of data warehouse
数电快速入门(三)(卡诺图化简法的介绍)
Re24:读论文 IOT-Match Explainable Legal Case Matching via Inverse Optimal Transport-based Rationale Ext
Pinduoduo open platform order information query interface [pdd.order.basic.list.get order basic information list query interface (according to transaction time)] code docking tutorial
Go----Go 语言基础之标识符、关键字、命名规范、变量、常量
如何一键重装win7系统?重装win7系统详细教程
js的new Function()常用方法
[Teach you to use the serial port idle interrupt of the STM32HAL library]
88.(cesium之家)cesium聚合图
How to solve the problem that the alarm information cannot be transmitted after EasyGBS is connected to the latest version of Hikvision camera?
未知点云结构文件转换需求
LayaBox---knowledge point
laravel whereDoesntHave
C语言知识大全(一)——C语言概述,数据类型
Codeforces Round #811 (Div. 3)
信创是什么意思?涉及哪些行业?为什么要发展信创?
【SQL之降龙十八掌】01——亢龙有悔:入门10题
使用堡塔应用管理器配置laravel队列方法
webmine网页挖矿木马分析与处置
Chapter7 : Network-Driven Drug Discovery