当前位置:网站首页>潘多拉 IOT 开发板学习(HAL 库)—— 实验8 定时器中断实验(学习笔记)
潘多拉 IOT 开发板学习(HAL 库)—— 实验8 定时器中断实验(学习笔记)
2022-07-05 18:39:00 【小辉_Super】
本文代码参考正点原子例程
实验功能
例程源码:(main.c)
main() 中只有 TIM3 的初始化函数,定时器中断相关代码在定时器中断服务(回调)函数中。
#include "sys.h"
#include "usart.h"
#include "delay.h"
#include "led.h"
#include "timer.h"
/********************************************************************************* ___ _ _____ _____ _ _ _____ _____ _ __ / _ \ | | |_ _|| ___|| \ | ||_ _|| ___|| | / / / /_\ \| | | | | |__ | \| | | | | |__ | |/ / | _ || | | | | __| | . ` | | | | __| | \ | | | || |_____| |_ | |___ | |\ | | | | |___ | |\ \ \_| |_/\_____/\___/ \____/ \_| \_/ \_/ \____/ \_| \_/ * ****************************************************************************** * 正点原子 Pandora STM32L475 IoT开发板 实验8 * 定时器中断实验 HAL库版本 * 技术支持:www.openedv.com * 淘宝店铺:http://openedv.taobao.com * 关注微信公众平台微信号:"正点原子",免费获取STM32资料。 * 广州市星翼电子科技有限公司 * 作者:正点原子 @ALIENTEK * ******************************************************************************/
int main(void)
{
HAL_Init();
SystemClock_Config(); //初始化系统时钟为80M
delay_init(80); //初始化延时函数 80M系统时钟
uart_init(115200); //初始化串口,波特率为115200
LED_Init(); //初始化LED
TIM3_Init(5000 - 1, 8000 - 1); //定时器3初始化,定时器时钟为80M,分频系数为8000-1,
//所以定时器3的频率为80M/8000=10K,自动重装载为5000-1,那么定时器周期就是500ms
while(1)
{
LED_R_TogglePin; //提示程序运行情况
delay_ms(100);
}
}
代码剖析
HAL_Init()
HAL_Init() 定义如下:(具体实现的功能见注释)
HAL_StatusTypeDef HAL_Init(void)
{
HAL_StatusTypeDef status = HAL_OK;
/* 配置 Flash 预取,指令缓存,数据缓存 */
/* 默认配置为:预存取关闭 指令缓存和数据缓存开启 */
#if (INSTRUCTION_CACHE_ENABLE == 0) // Flash开启预存取配置,能加速CPU代码的执行
__HAL_FLASH_INSTRUCTION_CACHE_DISABLE();
#endif /* INSTRUCTION_CACHE_ENABLE */
#if (DATA_CACHE_ENABLE == 0)
__HAL_FLASH_DATA_CACHE_DISABLE();
#endif /* DATA_CACHE_ENABLE */
#if (PREFETCH_ENABLE != 0)
__HAL_FLASH_PREFETCH_BUFFER_ENABLE();
#endif /* PREFETCH_ENABLE */
/* Set Interrupt Group Priority */
HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_2); // 配置 NVIC 优先级分组
/* Use SysTick as time base source and configure 1ms tick (default clock after Reset is MSI) */
if (HAL_InitTick(TICK_INT_PRIORITY) != HAL_OK) //初始化滴答定时器,时钟节拍设置为 1ms
{
status = HAL_ERROR;
}
else
{
/* Init the low level hardware */
HAL_MspInit(); // 低速的外设初始化,比如 GPIO、中断等的设置(使用 STM32CubeMx 生成代码时会将低速外设初始
// 代码当这类函数里,其他情况下可以忽略这个函数
}
/* Return function status */
return status;
}
HAL_InitTick()
滴答定时器时钟节拍初始化函数
__weak HAL_StatusTypeDef HAL_InitTick(uint32_t TickPriority)
{
HAL_StatusTypeDef status = HAL_OK;
/*Configure the SysTick to have interrupt in 1ms time basis*/
if (HAL_SYSTICK_Config(SystemCoreClock/1000UL) != 0U) // 系统时钟/1000,中断周期为 1ms
{
status = HAL_ERROR;
}
else
{
/*Configure the SysTick IRQ priority */
HAL_NVIC_SetPriority(SysTick_IRQn, TickPriority, 0); // 将滴答定时器的中断优先级设置为最高
}
/* Return function status */
return status;
}
SystemClock_Config()
SystemClock_Config()函数定义如下:(具体实现的功能见注释,仅供参考)
void SystemClock_Config(void)
{
HAL_StatusTypeDef ret = HAL_OK;
RCC_OscInitTypeDef RCC_OscInitStruct; // 定义振荡器初始化结构体变量
RCC_ClkInitTypeDef RCC_ClkInitStruct; // 定义时钟初始化结构体变量
__HAL_RCC_PWR_CLK_ENABLE(); // 使能电源控制时钟
/*Initializes the CPU, AHB and APB busses clocks*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; // 将 HSE(外部高速时钟)作为时钟源
RCC_OscInitStruct.HSEState = RCC_HSE_ON; // 开启 HSE
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; // 开启 PLL(锁相环)
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; // 将 HSE 作为 PLL 的时钟源
RCC_OscInitStruct.PLL.PLLM = 1; // PLL-VCO 输入时钟分频系数,1 表示 2 分频(8 / 2 = 4M,本开发板外部晶振频率为 8MHz)
RCC_OscInitStruct.PLL.PLLN = 20; // PLL-VCO 输出时钟倍频系数,4 * 20 = 80M,即输出时钟频率为 80MHz
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV7; // SAI 时钟的分频系数
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2; // SDMMC1, RNG 和 USB 的时钟分频系数
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2; // 主系统时钟的分频系数
ret = HAL_RCC_OscConfig(&RCC_OscInitStruct); //初始化时钟配置
if(ret != HAL_OK) while(1);
/*Initializes the CPU, AHB and APB busses clocks*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK
| RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2; // 将所有时钟同时进行配置
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; // 将 PLL 作为系统时钟源
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; // AHB 不分频
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1; // APB1 不分频
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; // APB2 不分频
ret = HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4); // 配置时钟初始结构体变量,
//使用 Flash 延迟4,等待状态(延迟)的数量需要根据CPU时钟(HCLK)的频率和内部电压范围来选择,具体怎么
//选需要参考芯片手册
if(ret != HAL_OK) while(1);
/*Configure the main internal regulator output voltage*/
ret = HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1); //内部寄存器输出电压配置
// 下面是 HAL_PWREx_ControlVoltageScaling() 函数说明的部分内容:
//PWR_REGULATOR_VOLTAGE_SCALE1 Regulator voltage output range 1 mode, typical output voltage
// at 1.2 V, system frequency up to 80 MHz.
if(ret != HAL_OK) while(1);
}
delay_init()
滴答定时器已经在 HAL_Init() 中进行了初始化,下面这个函数实际上就是给 fac_us 赋了一个值(目前暂不涉及操作系统,其他代码暂时不去研究)。
static u32 fac_us = 0; //us延时倍乘数
/** * @brief 初始化延迟函数,SYSTICK的时钟固定为AHB时钟 * * @param SYSCLK 系统时钟频率 * * @return void */
void delay_init(u8 SYSCLK)
{
#if SYSTEM_SUPPORT_OS //如果需要支持OS.
u32 reload;
#endif
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);//SysTick频率为HCLK
fac_us = SYSCLK; //不论是否使用OS,fac_us都需要使用
#if SYSTEM_SUPPORT_OS //如果需要支持OS.
reload = SYSCLK; //每秒钟的计数次数 单位为K
reload *= 1000000 / delay_ostickspersec; //根据delay_ostickspersec设定溢出时间
//reload为24位寄存器,最大值:16777216,在80M下,约209.7ms左右
fac_ms = 1000 / delay_ostickspersec; //代表OS可以延时的最少单位
SysTick->CTRL |= SysTick_CTRL_TICKINT_Msk; //开启SYSTICK中断
SysTick->LOAD = reload; //每1/OS_TICKS_PER_SEC秒中断一次
SysTick->CTRL |= SysTick_CTRL_ENABLE_Msk; //开启SYSTICK
#else
#endif
}
LED_Init()
/** * @brief LED IO初始化函数 * * @param void * * @return void */
void LED_Init(void)
{
/* LED-B PE9 LED-G PE8 LED-R PE7 */
GPIO_InitTypeDef GPIO_InitStruct;
__HAL_RCC_GPIOE_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_7 | GPIO_PIN_8 | GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOE, GPIO_PIN_7 | GPIO_PIN_8 | GPIO_PIN_9, GPIO_PIN_SET);
}
TIM3_Init()
本实验使用 TIM3 来计时,下面是 TIM3 的初始化函数,TIM3 的时钟频率为 80MHz,main() 函数中分频系数为 8000 - 1,800000000 / 8000 = 10000Hz,对应的计时周期就是 100us;重载值为 5000 - 1,那么定时器计时溢出中断的触发周期就是 500ms。
/** * @brief 通用定时器3中断初始化函数 * 定时器溢出时间计算方法:Tout=((arr+1)*(psc+1))/Ft us. * Ft=定时器工作频率,单位:Mhz * 这里使用的是定时器3!(定时器3挂在APB1上,时钟为HCLK:80Mhz) * * @param arr 自动重装值。 * @param psc 时钟预分频数 * * @return void */
void TIM3_Init(u16 arr, u16 psc)
{
TIM3_Handler.Instance = TIM3; //通用定时器3
TIM3_Handler.Init.Prescaler = psc; //分频系数
TIM3_Handler.Init.CounterMode = TIM_COUNTERMODE_UP; //向上计数器
TIM3_Handler.Init.Period = arr; //自动装载值
TIM3_Handler.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;//时钟分频因子
HAL_TIM_Base_Init(&TIM3_Handler);
HAL_TIM_Base_Start_IT(&TIM3_Handler); //使能定时器3和定时器3更新中断:TIM_IT_UPDATE
}
HAL_TIM_Base_MspInit()
上面的 HAL_TIM_Base_Init() 函数会调用定时器的底层驱动初始化函数,该函数中配置了定时器的中断属性。
/** * @brief 定时器底层驱动,开启时钟,设置中断优先级 * 此函数会被HAL_TIM_Base_Init()函数调用 * * @param htim 定时器句柄 * * @return void */
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM3)
{
__HAL_RCC_TIM3_CLK_ENABLE(); //使能TIM3时钟
HAL_NVIC_SetPriority(TIM3_IRQn, 1, 3); //设置中断优先级,抢占优先级1,子优先级3
HAL_NVIC_EnableIRQ(TIM3_IRQn); //开启ITM3中断
}
}
LED 操作函数
LED 的控制函数是宏函数,分别用到了 HAL_GPIO_WritePin() 和 HAL_GPIO_TogglePin() 两个库函数。
//RGB接口定义
#define LED_R(n) (n?HAL_GPIO_WritePin(GPIOE,GPIO_PIN_7,GPIO_PIN_SET):HAL_GPIO_WritePin(GPIOE,GPIO_PIN_7,GPIO_PIN_RESET))
#define LED_R_TogglePin HAL_GPIO_TogglePin(GPIOE,GPIO_PIN_7) //LED_R电平翻转
#define LED_G(n) (n?HAL_GPIO_WritePin(GPIOE,GPIO_PIN_8,GPIO_PIN_SET):HAL_GPIO_WritePin(GPIOE,GPIO_PIN_8,GPIO_PIN_RESET))
#define LED_G_TogglePin HAL_GPIO_TogglePin(GPIOE,GPIO_PIN_8) //LED_G电平翻转
#define LED_B(n) (n?HAL_GPIO_WritePin(GPIOE,GPIO_PIN_9,GPIO_PIN_SET):HAL_GPIO_WritePin(GPIOE,GPIO_PIN_9,GPIO_PIN_RESET))
#define LED_B_TogglePin HAL_GPIO_TogglePin(GPIOE,GPIO_PIN_9) //LED_B电平翻转
delay_ms()
delay_ms() 里运行的是 delay_us(), delay_us()通过滴答定时器实现延时。上面的 delay_init() 已经将 fac_us 设置为了 80,滴答定时器计数 80 次需要用 10-6 秒(系统时钟为 80MHz),即 1us。
/** * @brief 延时毫秒(ms)函数 * * @param nms 需要延时多少毫秒 * * @return void */
void delay_ms(u16 nms)
{
u32 i;
for(i = 0; i < nms; i++) delay_us(1000);
}
/** * @brief 延时微秒(us)函数 * * @remark nus:0~190887435(最大值即2^32/[email protected]_us=22.5) * * @param nus 需要延时多少微秒 * * @return void */
void delay_us(u32 nus)
{
u32 ticks;
u32 told, tnow, tcnt = 0;
u32 reload = SysTick->LOAD; //LOAD的值
ticks = nus * fac_us; //需要的节拍数
told = SysTick->VAL; //刚进入时的计数器值
while(1)
{
tnow = SysTick->VAL;
if(tnow != told)
{
if(tnow < told)tcnt += told - tnow; //这里注意一下SYSTICK是一个递减的计数器就可以了.
else tcnt += reload - tnow + told;
told = tnow;
if(tcnt >= ticks)break; //时间超过/等于要延迟的时间,则退出.
}
}
}
中断服务函数
在底层中断服务函数中调用 HAL 库的中断服务函数。
/** * @brief 定时器3中断服务函数 * * @param void * * @return void */
void TIM3_IRQHandler(void)
{
HAL_TIM_IRQHandler(&TIM3_Handler);
}
HAL_TIM_IRQHandler() 里会运行一些中断回调函数,其中就包括 HAL_TIM_PeriodElapsedCallback() 定时器计数溢出中断回调函数,
/** * @brief 回调函数,定时器中断服务函数调用 * * @param htim 定时器句柄 * * @return void */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim == (&TIM3_Handler))
{
LED_B_TogglePin; //LED_B翻转
}
}
边栏推荐
- 爬虫01-爬虫基本原理讲解
- Deep copy and shallow copy [interview question 3]
- Shang Silicon Valley Shang preferred project tutorial release
- Exemple Quelle est la relation entre le taux d'échantillonnage, l'échantillon et la durée?
- Word查找红色文字 Word查找颜色字体 Word查找突出格式文本
- Problems encountered in the project u-parse component rendering problems
- Interprocess communication (IPC): shared memory
- Applet modification style (placeholder, checkbox style)
- AI open2022 | overview of recommendation systems based on heterogeneous information networks: concepts, methods, applications and resources
- 《ClickHouse原理解析与应用实践》读书笔记(5)
猜你喜欢
如何写出好代码 - 防御式编程
![[HCIA cloud] [1] definition of cloud computing, what is cloud computing, architecture and technical description of cloud computing, Huawei cloud computing products, and description of Huawei memory DD](/img/b8/624799e4bf788e4476b155486f478b.png)
[HCIA cloud] [1] definition of cloud computing, what is cloud computing, architecture and technical description of cloud computing, Huawei cloud computing products, and description of Huawei memory DD
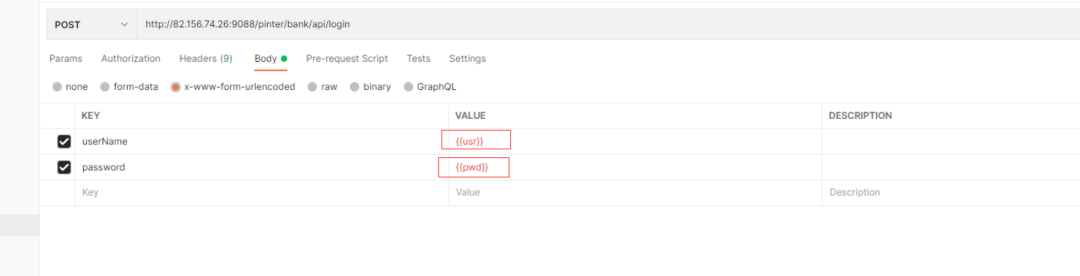
Postman核心功能解析 —— 参数化和测试报告
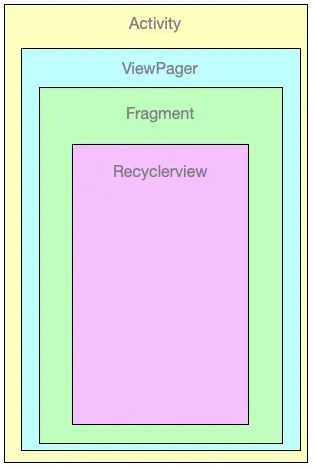
Memory leak of viewpager + recyclerview

A2L file parsing based on CAN bus (3)

Find in MySQL_ in_ Detailed explanation of set() function usage

2022年阿里Android高级面试题分享,2022阿里手淘Android面试题目
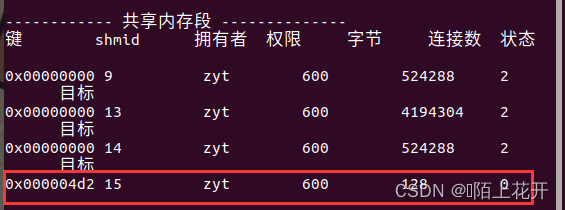
Interprocess communication (IPC): shared memory
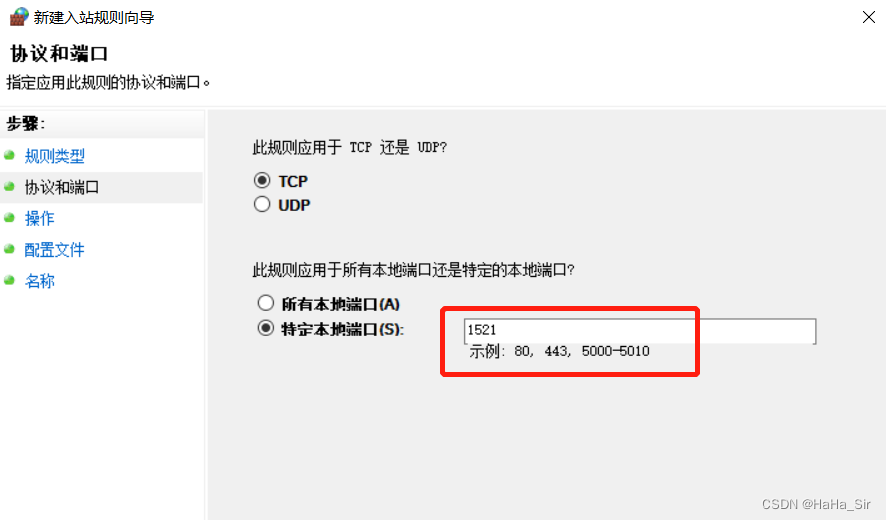
Windows Oracle open remote connection Windows Server Oracle open remote connection
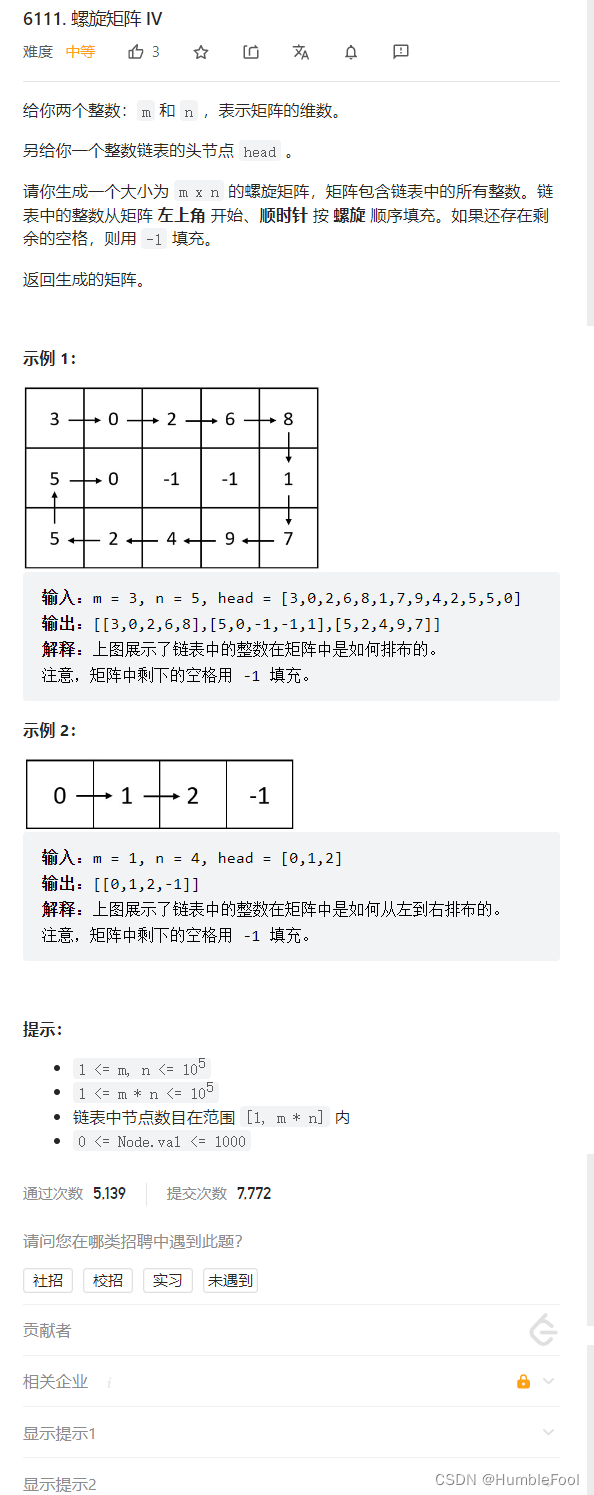
LeetCode 6111. Spiral matrix IV
随机推荐
Common time complexity
Is it complicated to open an account? Is online account opening safe?
2022最新中高级Android面试题目,【原理+实战+视频+源码】
Interprocess communication (IPC): shared memory
LeetCode 6111. Spiral matrix IV
The era of Web3.0 is coming. See how Tianyi cloud storage resources revitalize the system to enable new infrastructure (Part 2)
Rse2020/ cloud detection: accurate cloud detection of high-resolution remote sensing images based on weak supervision and deep learning
How to choose the most formal and safe external futures platform?
5. Data access - entityframework integration
lombok @Builder注解
什么是文本挖掘 ?「建议收藏」
Tianyi cloud understands enterprise level data security in this way
XML基础知识概念
7-2 保持链表有序
基于can总线的A2L文件解析(3)
Insufficient picture data? I made a free image enhancement software
MySQL数据库索引教程(超详细)
视频融合云平台EasyCVR增加多级分组,可灵活管理接入设备
企业数字化转型之路,从这里开始
2022 Alibaba Android advanced interview questions sharing, 2022 Alibaba hand Taobao Android interview questions