当前位置:网站首页>16.[STM32]从原理开始带你了解DS18B20温度传感器-四位数码管显示温度
16.[STM32]从原理开始带你了解DS18B20温度传感器-四位数码管显示温度
2022-07-05 15:18:00 【依点_DW】
作者简介:大家好啊,我叫DW,每天分享一些我新学到的知识,期待和大家一起进步
系列专栏:STM32
小实验目标:在四位数码管上显示DS18B20采集到的温度值
如有写得不好的地方欢迎大家指正开发板:正点原子STM32F103Mini版
创作时间:2022年6月1日由于最近考了驾照和忙毕业论文去了,停更了20多天,从今天开始恢复更新,接下来继续更新一些常用的传感器,期待和大家一起进步!!
目录
-------------------------------
-------------------------------
1. 数字温度传感器(DS18B20)
DS18B20具有独特的一线接口,只需要一条口线通信多点能力,简化了分布式温度传感应用无需外部元件可用数据总线供电,电压范围为3.0 V至5.5 V 无需备用电源 测量温度范围为-55 ° C至+125 ℃ 。
DS18B20可以程序设定9~12位的分辨率,温度转换为12位数字格式最大值为750毫秒,精度为:±0.5°C。可选更小的封装方式,更宽的电压适用范围。分辨率设定,及用户设定的报警温度存储在EEPROM中,掉电后依然保存。
DS18B20的性能是新一代产品中最好的!性能价格比也非常出色!由于DS18B20是一条口线通信,所以中央微处理器与DS18B20只有一个一条口线连接。为读写以及温度转换可以从数据线本身获得能量,不需要外接电源。 因为每一个DS18B20包含一个独特的序号,多个DS18B20可以同时存在于一条总线。它的用途很多,包括空调环境控制,感测建筑物内温设备或机器,并进行过程监测和控制。
DS18B20实物图和引脚封装图

面对着平的那一面,左负右正,一旦接反就会立刻发热,有可能烧毁!同时,接反也是导致该传感器总是显示85℃的原因。实际操作中将正负反接,传感器立即发热,液晶屏不能显示读数,正负接好后显示85℃。
DS18B20引脚说明:
- GND:电源地线
- DQ:数字信号输入/输出端。
- VDD:外接供电电源输入端。
DS18B20与STM32连接接线图:
- GND:地
- DQ:接PA0同时接一个上拉电阻
- VDD:3.3V

外接上拉电阻阻值:
DS18B20的工作电流约为1mA,VCC一般为5V,则电阻R=5V/1mA=5KΩ,故接了一个阻值相近的5.1kΩ电阻。
2. 操作函数的编写
1.DS18B20函数的初始化
void DS18B20_UserConfig(void){
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//配置PB0时钟
GPIO_InitStructure.GPIO_Pin = DS18B20;//PA0
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;//端口输出速率
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出模式
GPIO_Init(DS18B20_PROT,&GPIO_InitStructure);//初始串口
}2. 切换DS18B20输出输入引脚函数
//输入输出模式选择函数
void Output_Input_Mode(u8 cmd){
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体
if(cmd){//1:输出模式
GPIO_InitStructure.GPIO_Pin = DS18B20;//PB0
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;//端口输出速率
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出模式
}
else{//0:输入模式
GPIO_InitStructure.GPIO_Pin = DS18B20;//PB0
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉模式
}
GPIO_Init(DS18B20_PROT,&GPIO_InitStructure);//初始串口
}3. DS18B20启动时序

由上图可以知道,VCC为电源,中间的那根线为数据线,GND为地。第一步,利用单片机发送指令将数据线引脚输出为低电平且保持480us的时间,之后,释放总线(拉高,延时30us);第二,之后DS18B20开始向单片机进行信号的反馈,反馈它的脉冲存在或者不存在,如果DS18B20存在,它会在60-240us之内向单片机反馈一个低电平,我们读取这个电平信号就可以知道DS18B20是否存在了,具体函数如下:
//启动信号 判断是否成功
u8 DS18B20_Start_Signal(void){
u8 data;
//写
Output_Input_Mode(1);//输入模式
DS18B20_Low;
delay_us(480);
DS18B20_High;
delay_us(30);
//读引脚状态 1:DS18B20失败 0:DS18B20成功
Output_Input_Mode(0);//输出模式
data = GPIO_ReadInputDataBit(DS18B20_PROT,DS18B20);//读取输入状态 60~240us
delay_us(200);//200us 480+30+240=750 960-750=210 取200us即可
return data;
}当我们插上DS18B20后,数码管上显示0,拔掉DS18B20后,数码管显示1,则说明我们的 启动程序没有问题。

4.DS18B20写时序

这个时序图有两部分组成,分别为写“0”和写“1”操作,我们只需要看写“1”操作即可,因为如果写的不是“1”时,那么就是“0”,此时系统会自动补“0”。
我们需要一位一位的写数据,一个字节需要写八次。写数据时需要把数据引脚配置为推挽输出,由写“1”部分时序图可以知道,我们需要将总线拉低时间>1us,我们选择延时2us即可,2us之后就可以向总线写数据了,就可以向总线写数据了;DS18B20先出低位后出高位,所以需要把数据从高位往低位移动,但是每次需要先判断低位; 写完毕之后,我们需要进行一定的延时,延时时间为:15us+30us=40us,这个时间是把数据写到相应寄存器的时间,最后再将总线拉高释放总线即可,之后再将数据每次循环右移一位,这样就可以写第二帧数据了。
//向DS18B20写数据
//写:输出模式 1
void DS18B20_Write_Byte(u8 data){
for(u8 i=0;i<8;i++){
Output_Input_Mode(1);
DS18B20_Low;
delay_us(2);
((data&0x01)) ? DS18B20_High : DS18B20_Low;//DS18B20 低位先出,故&0x01
delay_us(45);
DS18B20_High;//拉高总线
data>>=1;//数据右移八次 既完成写8bit数据
}
}5. DS18B20读时序

读时序需要带有返回值, 所以定义一个带返回值的函数。对总线进行读数据之前需要对数据进行移位,之后配置数据线IO口的状态,对引脚进行写操作,拉低数据引脚,延时2us后在拉高数据引脚;之后进行读操作,IO口选择为输入模式,如果读到的数据为“1”,就或上“1”,否则系统自动补“0”,由于读操作流程的时间和写操作流程的时间是一样的,故也需要增加45us的延时。
//读DS18B20数据
//读:输入模式 0
u8 DS18B20_Read_Byte(void){
u8 data;
for(u8 i=0;i<8;i++){
data>>=1;
Output_Input_Mode(1);
DS18B20_Low;
delay_us(2);
DS18B20_High;//拉高总线
Output_Input_Mode(0);
if(GPIO_ReadInputDataBit(DS18B20_PROT,DS18B20) == SET){
data |= 0x80;//从高位开始
}
delay_us(45);
}
return data;
}6.温度转换
温度寄存器格式和温度/数据对应关系 
Ds18b20用12位存贮温值度最高位为符号位下图为18b20的温度存储方式,负温度 S = 1/ 正温度 S = 0 。
传输方式先传低位后传高位。
配置寄存器允许用户设定9位,10位,11位和12位的温度分辨率,分别对应着温度的分辨率为:0.5°C,0.25°C,0.125°C,0.0625°C
默认为12位分辨率:0.0625°C
(1)发送启动信号,向总线写指令;
(2)由于先读取低位(LSB).在读取高位(MSB),故需要合并数据(temp);
(3)温度转换公式,负温度转换:反码+1;
//获取温度值
void DS18B20_Read_Temperature(u16 *data){
u8 LSB = 0,MSB = 0;
u16 temp;
//温度转换
DS18B20_Start_Signal();
DS18B20_Write_Byte(0xcc);//跳过ROM
DS18B20_Write_Byte(0x44);//温度变换
//delay_ms(750);
//12位精度 750ms 数码管本身有延时,故这个延时可以去掉
//读取寄存器
DS18B20_Start_Signal();
DS18B20_Write_Byte(0xcc);//跳过ROM
DS18B20_Write_Byte(0xbe);//读暂存存储器
LSB = DS18B20_Read_Byte();
MSB = DS18B20_Read_Byte();
temp = (MSB<<8) | LSB;//数据合并为16位
if((temp&0xf800) == 0xf800){ //负温度;s=1 正温度: s=0
*data =(((~temp+0x01)*-0.0625)+0.5)*10.0;
}
else{
*data =((temp*0.0625)+0.5)*10.0;
}
}把程序性烧录进去后,可以看到四位数码管显示对应的温度。
好了,今天的分享就到这里了,如果觉得有用的话记得收藏和点赞哦,谢谢大家!
本章结束,我们下一章见
参考资料:
1.STM32固件库手册
2.正点原子STM32不完全手册_库函数版本
3.参考视频
4.数字电子技术基础
5.15.[STM32]一篇文章教会你使用75HC595芯片驱动四位数码管
资料已上传,需要自取
边栏推荐
- JS topic - console log()
- 超越PaLM!北大硕士提出DiVeRSe,全面刷新NLP推理排行榜
- 六种常用事务解决方案,你方唱罢,我登场(没有最好只有更好)
- MySQL table field adjustment
- Virtual base class (a little difficult)
- Magic methods and usage in PHP (PHP interview theory questions)
- Database learning - Database Security
- Noi / 1.4 07: collect bottle caps to win awards
- Reasons and solutions for redis cache penetration and cache avalanche
- mapper.xml文件中的注释
猜你喜欢
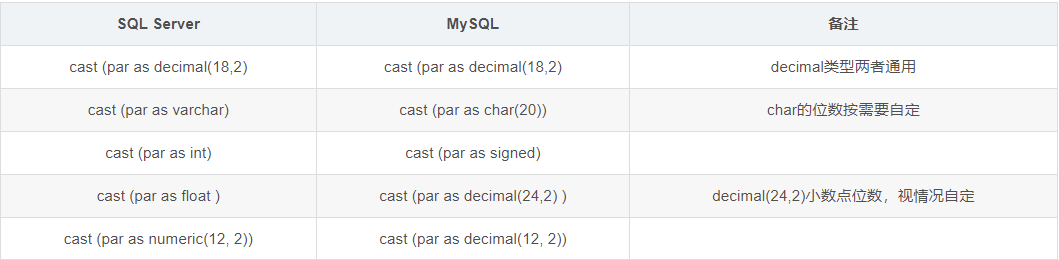
SQL Server learning notes
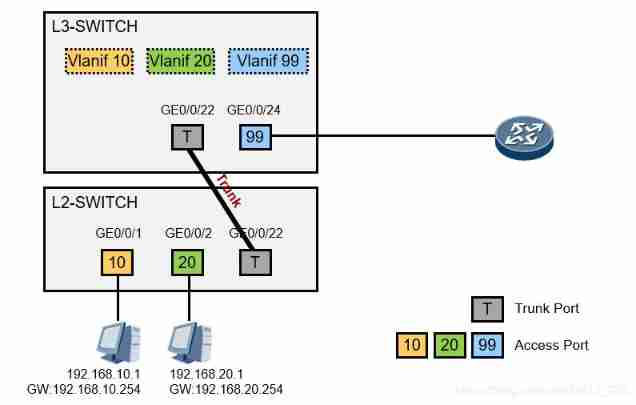
Data communication foundation - routing communication between VLANs

SQL injection sqllabs (basic challenges) 1-10
sql server学习笔记
Bugku telnet
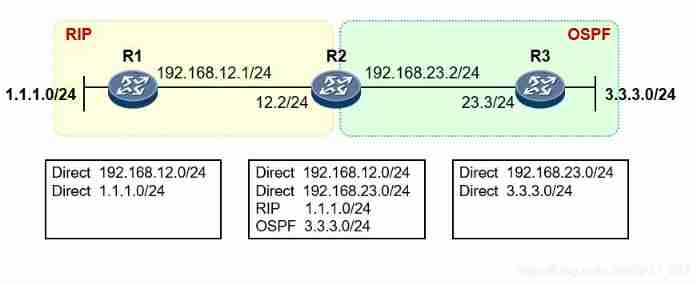
Data communication foundation - route republication
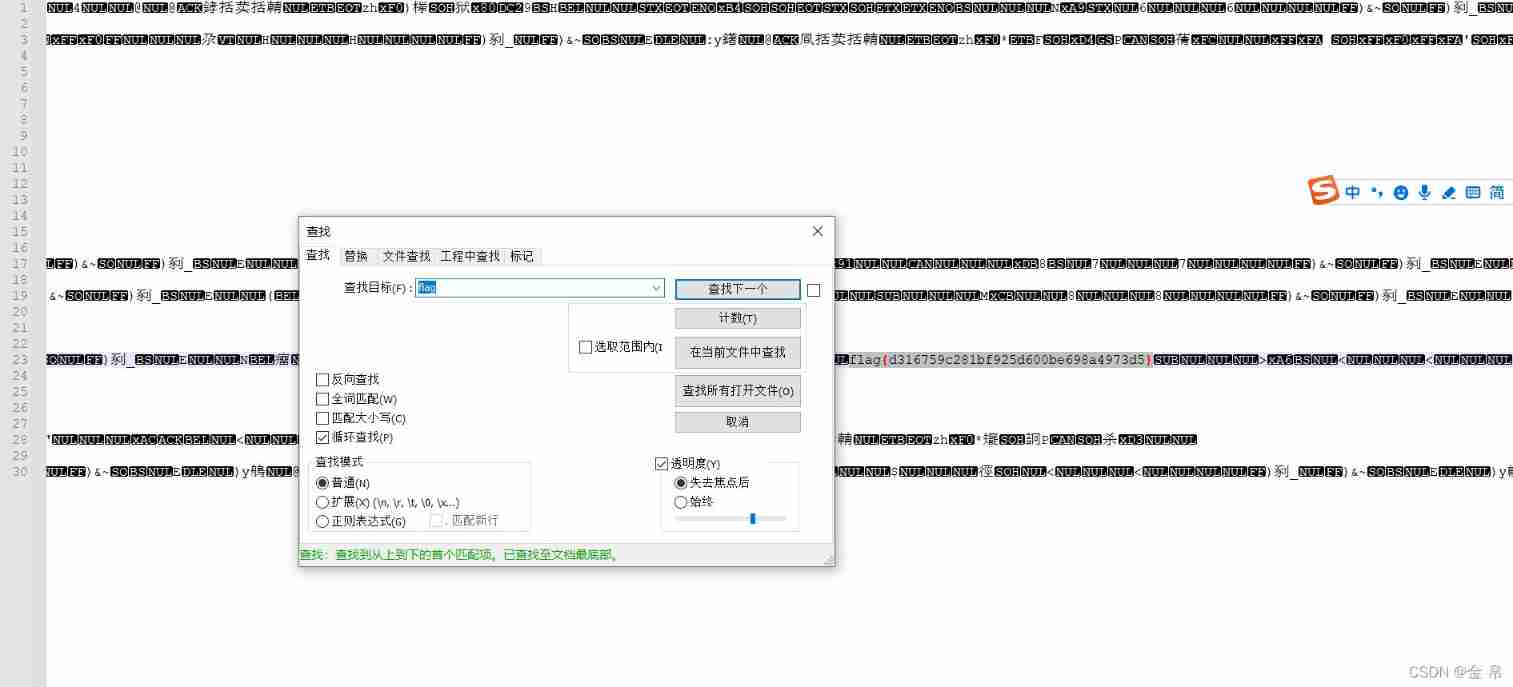
Misc Basic test method and knowledge points of CTF
Bugku's Eval

Data communication foundation - dynamic routing protocol rip
Explanation report of the explosion
随机推荐
Advanced level of static and extern
基于OpenHarmony的智能金属探测器
CSDN I'm coming
Optional parameters in the for loop
Summary of the second lesson
Thymeleaf uses background custom tool classes to process text
Ctfshow web entry command execution
Noi / 1.3 01: a+b problem
Aike AI frontier promotion (7.5)
MySQL表字段调整
CODING DevSecOps 助力金融企业跑出数字加速度
Maximum common subsequence
Magic methods and usage in PHP (PHP interview theory questions)
Au - delà du PARM! La maîtrise de l'Université de Pékin propose diverse pour actualiser complètement le classement du raisonnement du NLP
Common redis data types and application scenarios
Value series solution report
Ionic Cordova project modification plug-in
I spring and autumn blasting-2
Redis distributed lock principle and its implementation with PHP (2)
Write a go program with vscode in one article