当前位置:网站首页>Point cloud data denoising
Point cloud data denoising
2022-07-03 19:40:00 【Old urchin】
It mainly includes bilateral filtering 、 Curvature flow 、 Density mean drift clustering 、 Noise classification and denoising 、 neural network 、 High density point cloud denoising based on curvature feature hybrid classification Voxel filtering combined with region growth etc.
1、 Bilateral filtering algorithm for point cloud denoising , Bilateral filter is a Gaussian function based on spatial distribution , It can better save the high-frequency information of the target , It smoothes the overall trend of point cloud data , The data points are displaced along the normal direction .
2、 Denoising algorithm based on curvature flow , Every time individual spot Press mirror it Of song rate speed degree Along the the Law towards move dynamic .
Both of the above can make the point cloud model smooth , But at the same time, it will change the coordinates of the point , Lose the texture information of point cloud information . 3、 Density based mean shift clustering Denoising Algorithm , send
Each point gradually approaches the position with the highest local density .
However, cluster noise with high density cannot be filtered
4、 Denoising method of noise classification , Yes Large scale Noise use Radius filtering method and Statistical filtering Method denoising , and Small scale Noise use Bilateral filtering method Denoise .
5、 Adaptive bilateral filtering method for point cloud denoising , The algorithm first establishes k-d Neighborhood , Then take the micro tangent plane at this point as the viewing plane , In this view plane, the spatial variance is realized by using the target scale information σs Local adaptive value .( Medical Science CT The edge of the vertebrae of the image is preserved )
6、 Using support vector machine and neural network algorithm to denoise High time cost
7、 Using blur C- Mean and mean filtering for point cloud denoising Small scale noise and cluster noise cannot be filtered
- 8、 High density point cloud denoising method based on curvature feature hybrid classification .
this paper Focus on the combination of voxel filtering and region growth method
The basic idea :
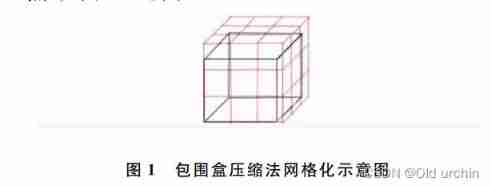
Gridding point cloud data ( Voxelization ), The whole can be regarded as a cuboid , Using bounding box compression, it is cut into several equal sized cubes , Make up for deficiencies .
Local processing of high-density grid points , Small density grids have both noise and non noise points
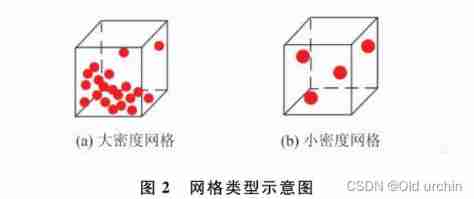
Make use of the fact that there is no connection between the noise and the surrounding environment Regional growth method
Processing steps of regional growth method :
(1) Determine a radius a, Find the point with the most points in the grid as the seed point
(2) The selected seed point is in radius b Combine the surrounding points and use the least square to fit a plane
(3) radius b If the included angle between the non seed point and the connecting line of the seed point is greater than a threshold , They are classified as noise points, otherwise they are non noise points .
(4) Take the non noise points in the large grid as new seed points to cycle , Until all points are classified . Use the small grid to grow the global region again .
- It is not explained in the paper (3) How to calculate the medium threshold needs to be studied and the calculation time is long , High complexity , Parameters cannot be taken adaptively
边栏推荐
- 05 -- QT OpenGL draw cube uniform
- These problems should be paid attention to in the production of enterprise promotional videos
- Merge K ascending linked lists
- Chapter 2: 4-digit Kaplan number, search even digit Kaplan number, search n-digit 2-segment sum square number, m-digit ingenious square number without 0, specify the number to form a 7-digit square nu
- WPF format datetime in TextBlock- WPF format DateTime in TextBlock?
- Utilisation de base du cadre unitest
- 10 smart contract developer tools that miss and lose
- Part 28 supplement (XXVIII) busyindicator (waiting for elements)
- 2022-06-27 网工进阶(十二)IS-IS-开销类型、开销计算、LSP的处理机制、路由撤销、路由渗透
- Valentine's Day - make an exclusive digital collection for your lover
猜你喜欢
CMD implements the language conversion of locale non Unicode programs

第一章:拓广同码小数和s(d, n)

Day18 - basis of interface testing
IPv6 experiment
SQL injection for Web Security (1)

The necessity of lean production and management in sheet metal industry
PR 2021 quick start tutorial, material import and management

Thesis study - 7 Very Deep Convolutional Networks for Large-Scale Image Recognition (3/3)

2022-06-25 网工进阶(十一)IS-IS-三大表(邻居表、路由表、链路状态数据库表)、LSP、CSNP、PSNP、LSP的同步过程
第一章:求所有阶乘和数,大奖赛现场统分程序设计,三位阶乘和数,图形点扫描,递归求n的阶乘n!,求n的阶乘n!,舍罕王失算
随机推荐
Free sharing | linefriends hand account inner page | horizontal grid | not for sale
2022-06-28 网工进阶(十三)IS-IS-路由过滤、路由汇总、认证、影响ISIS邻居关系建立的因素、其他命令和特性
Xctf attack and defense world crypto advanced area best_ rsa
Luogu-p1107 [bjwc2008] Lei Tao's kitten
第一章:求同吗小数和s(d, n)
BOC protected alanine porphyrin compound TAPP ala BOC BOC BOC protected phenylalanine porphyrin compound TAPP Phe BOC Qi Yue supply
unittest框架基本使用
2. Template syntax
Pecan - route
BOC protected tryptophan porphyrin compound (TAPP Trp BOC) Pink Solid 162.8mg supply - Qiyue supply
第一章: 舍罕王失算
02 -- QT OpenGL drawing triangle
Buuctf's different flags and simplerev
FPGA 学习笔记:Vivado 2019.1 工程创建
Use unique_ PTR forward declaration? [repetition] - forward declaration with unique_ ptr? [duplicate]
BOC protected phenylalanine zinc porphyrin (Zn · TAPP Phe BOC) / iron porphyrin (Fe · TAPP Phe BOC) / nickel porphyrin (Ni · TAPP Phe BOC) / manganese porphyrin (Mn · TAPP Phe BOC) Qiyue Keke
Win10 share you don't have permission
Floating source code comment (38) parallel job processor
[wallpaper] (commercially available) 70 wallpaper HD free
What is the difference between a kill process and a close process- What are the differences between kill process and close process?