当前位置:网站首页>Decryption function calculates "task state and lifecycle management" of asynchronous task capability
Decryption function calculates "task state and lifecycle management" of asynchronous task capability
2022-07-07 02:14:00 【InfoQ】
Preface
Management of task status and life cycle
Task status management
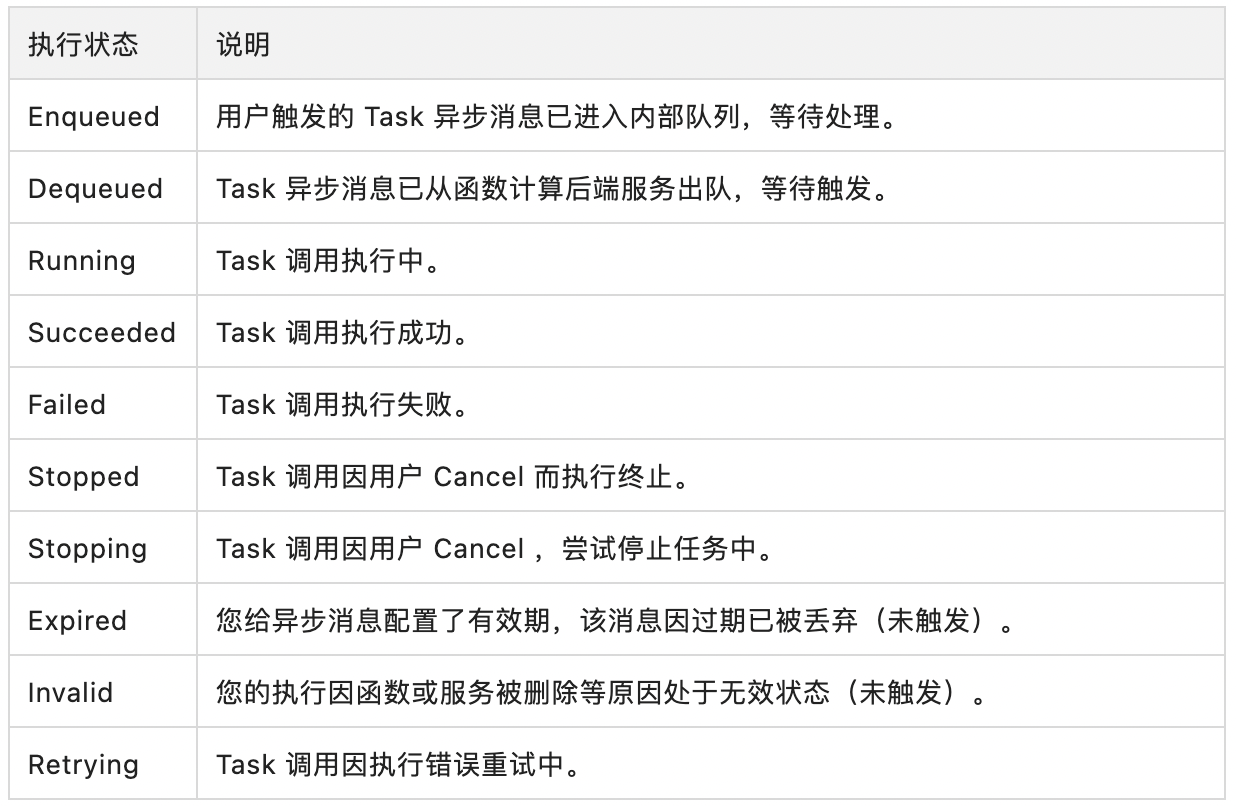
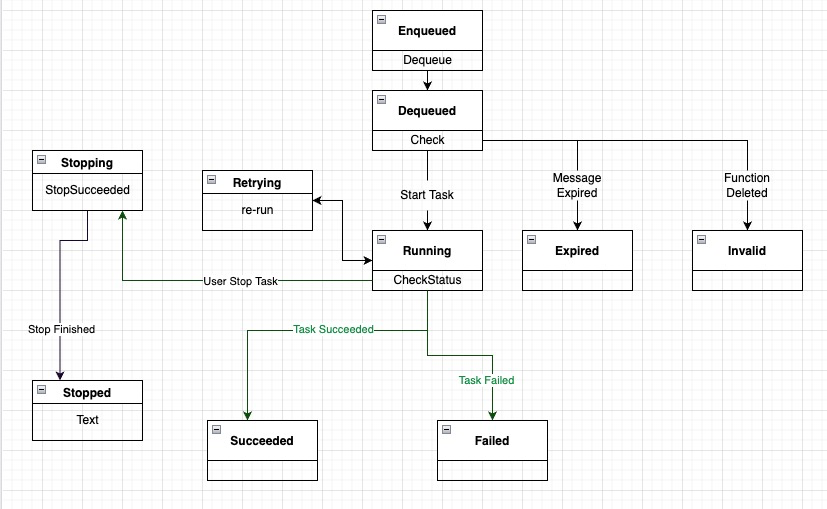
- After the user triggers a task , Task in the team , Changed to: Enqueued state , And return trigger success ;
- The task is queued in the back-end service of function calculation , The task becomes Dequeued state ;
- The backend will check the task configuration . If
- The asynchronous message validity function is configured , And the difference between the time of leaving the team and the time of joining the team has exceeded the validity period , Then the task is discarded , Changed to: Expired state . Task to terminate ;
- The function corresponding to the task has been deleted , Or there is an error creating the instance , Then discard the message , The task is changed to Invalid state ;
- After the inspection, the task officially enters Running state . At this time, the task has triggered the actual execution ;
- When the task is completed , According to the return, it will change to the following states :
- Retrying: The user has configured the number of retries ( The default is 3), And the task execution failed , At this time, it will enter the retry state , Then it will be changed to Running state ;
- Failed: Task execution failed , And the number of retries has exceeded . The task status will be changed to Failed;
- Succeeded: The task was executed successfully .
- If the user triggers during the whole state flow Cancel, Then the task will be changed to Stopping state , And try to stop the task . When the task stops successfully , Mission entry Stopped state .
Task runtime management and life cycle
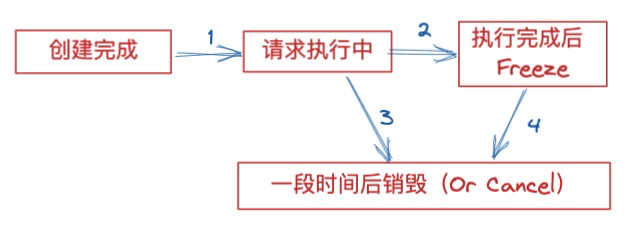
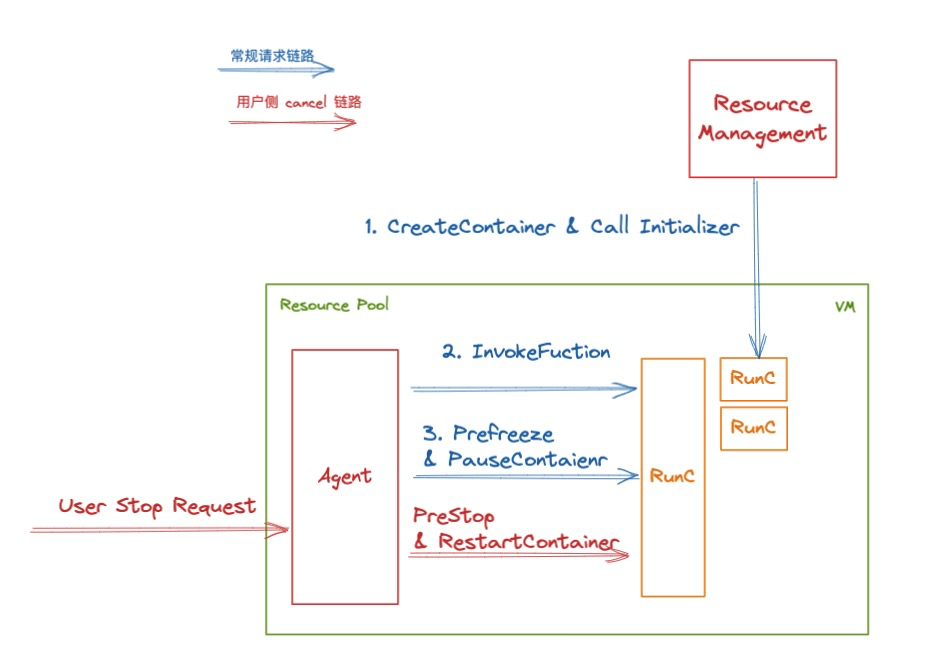
- The creation is complete -> Execute request phase : Support Initializer function , Support initializing instance operations . Users can configure such as global variables 、 Connection pool initialization and other related operations ;
- In execution -> After execution Pause example : Support PreFreeze Interface , Support in function Pause Execute user-defined logic before the instance ;
- In execution -> external cancel: Function evaluation will force Restart User instance , stay Restart Pre support PreStop Interface . The user can configure the logic of graceful stop , To support Cancel Custom behavior when ;
- After completion Pause -> Destroy instance : When there is no request for a period of time , Function calculation will destroy the instance . This will call PreStop Interface , Users can configure the behavior of destroying containers ( Such as closing the connection pool ).
Stop the task
import fc "github.com/aliyun/fc-go-sdk"
func CancelJob() {
stopInput := fc.NewStopStatefulAsyncInvocationInput("ServiceName", "FunctionName", "TaskUUID")
output, err := fcClient.StopStatefulAsyncInvocation(stopInput)
...
}
summary
边栏推荐
- 解密函数计算异步任务能力之「任务的状态及生命周期管理」
- Flir Blackfly S USB3 工业相机:计数器和定时器的使用方法
- 我如何编码8个小时而不会感到疲倦。
- centos8安装mysql报错:The GPG keys listed for the “MySQL 8.0 Community Server“ repository are already ins
- 建议收藏!!Flutter状态管理插件哪家强?请看岛上码农的排行榜!
- Yiwen takes you into [memory leak]
- FLIR blackfly s industrial camera: configure multiple cameras for synchronous shooting
- Unicode string converted to Chinese character decodeunicode utils (tool class II)
- Web开发小妙招:巧用ThreadLocal规避层层传值
- Blackfly s usb3 industrial camera: buffer processing
猜你喜欢
Shell script quickly counts the number of lines of project code

Big guys gather | nextarch foundation cloud development meetup is coming!
Analyze "C language" [advanced] paid knowledge [End]

Zhang Ping'an: accelerate cloud digital innovation and jointly build an industrial smart ecosystem
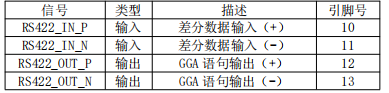
Integrated navigation: product description and interface description of zhonghaida inav2
处理streamlit库上传的图片文件

Flir Blackfly S 工业相机 介绍
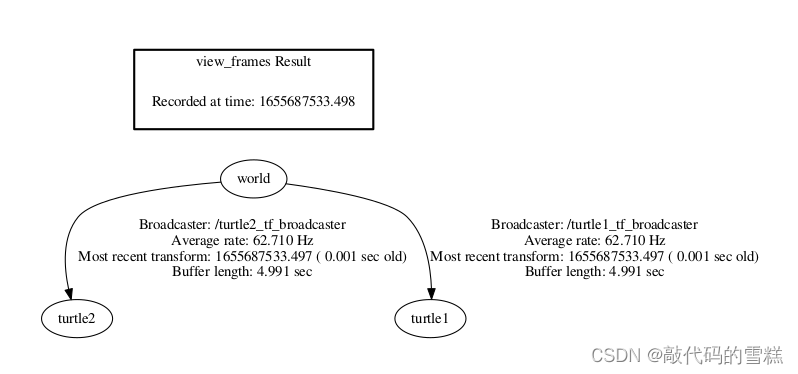
ROS learning (22) TF transformation
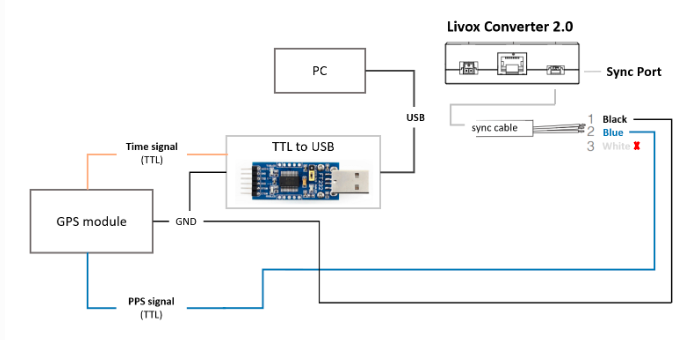
3D激光SLAM:Livox激光雷达硬件时间同步
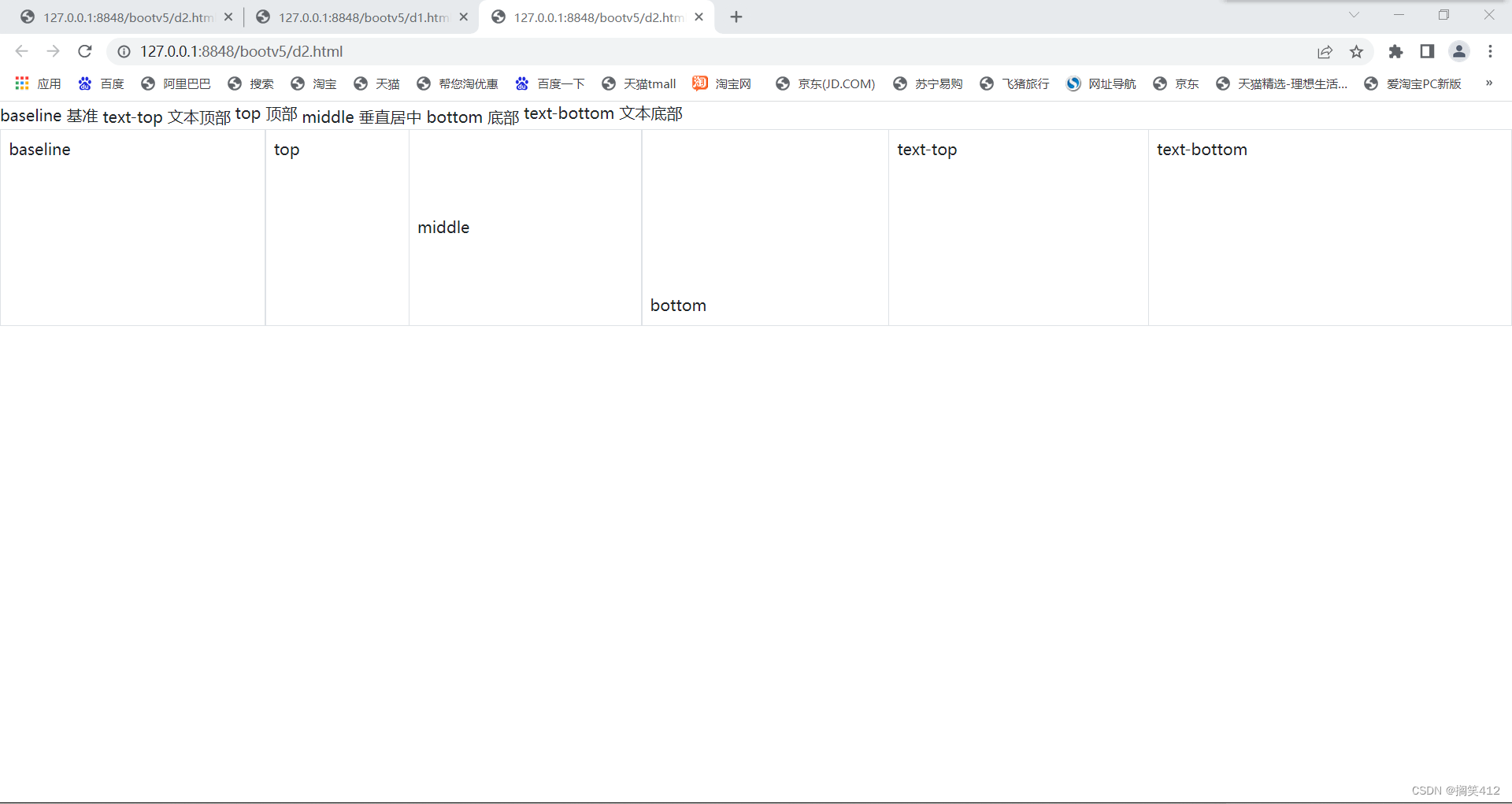
2022/0524/bookstrap
随机推荐
Analyze "C language" [advanced] paid knowledge [II]
Golang foundation - data type
Treadpoolconfig thread pool configuration in real projects
Get to know MySQL for the first time
Ros Learning (23) Action Communication Mechanism
LeetCode. Sword finger offer 62 The last remaining number in the circle
How did partydao turn a tweet into a $200million product Dao in one year
The GPG keys listed for the "MySQL 8.0 community server" repository are already ins
STM32F4---PWM输出
Box stretch and pull (left-right mode)
Time synchronization of livox lidar hardware -- PPS method
猫猫回收站
Blackfly S USB3工业相机:缓冲区处理
张平安:加快云上数字创新,共建产业智慧生态
将截断字符串或二进制数据
Introduction to microservice architecture
Public key \ private SSH avoid password login
传感器:土壤湿度传感器(XH-M214)介绍及stm32驱动代码
企业中台建设新路径——低代码平台
3D激光SLAM:Livox激光雷达硬件时间同步