当前位置:网站首页>组合导航:中海达iNAV2产品描述及接口描述
组合导航:中海达iNAV2产品描述及接口描述
2022-07-06 18:23:00 【月照银海似蛟龙】
产品介绍
iNAV2车载组合定位模块是由中海达最新推出的一款高精度组合实时定位导航模块。
组合定位模块用于车载定位导航,主要用于具有自动驾驶或智能驾驶功能的乘用车、无人车。 组合定位模块作为自动驾驶系统中的定位传感器,为车辆提供厘米级定位定向数据和姿态数据。结合高精度地图实现自动驾驶或者智能辅助驾驶。
组合定位模块支持定位定向,内置惯性传感器支持姿态输出。与车辆轮速等信息融合,在无 GNSS 信号的情况下可持续一定的高精度定位时间。
实物张下面这个样子:
接口描述
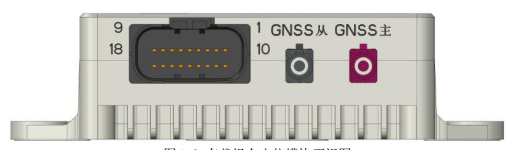
如上图所示为车载组合定位模块正视图,图中 18pin 的接口是外围串口线接入口, 标有“GNSS 主”和“GNSS 从”的 FAKRA 连接器分别是主板的主天线和辅天线接口。
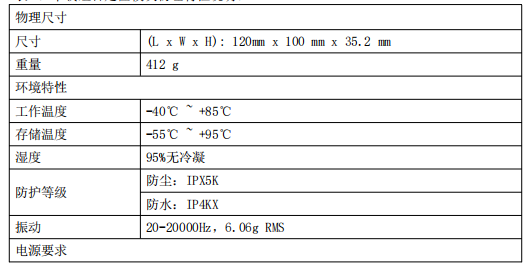
技术参数
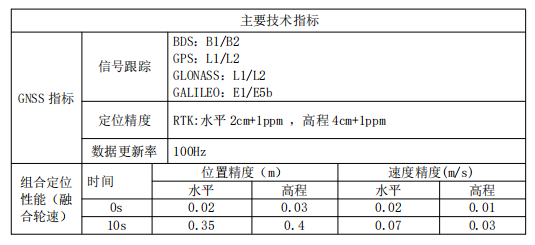
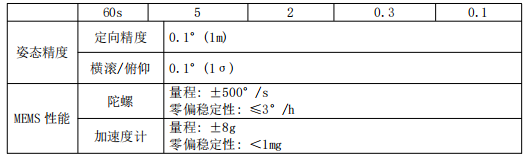
主要技术指标
电气和物理特性
组合模块外观和安装尺寸如下图所示: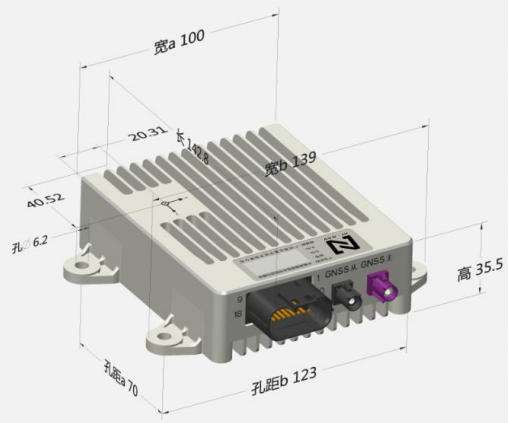
I/O引脚描述
18Pin 双排公头正视图如下所示: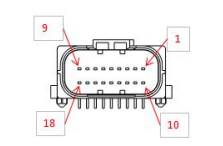
车载组合定位模块 I/0 引脚描述说明: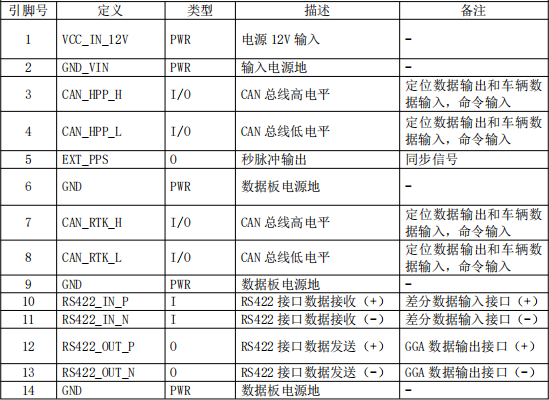

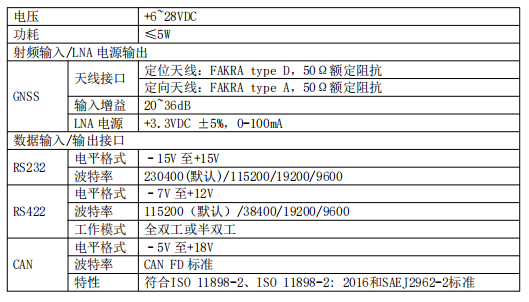
数据接口
车载组合定位模块提供了 RS232 标准数据接口、RS422 标准数据接口、CAN 接口具体描述如下
RS232接口
RS232 接口说明: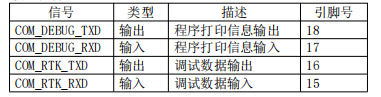
组合模块提供两个 RS232 接口。分别是 COM-RTK 和 COM-DEBUG,两个 RS232 接口符 合标准 EIA-RS232 电平,输入电压范围-15V DC ~ +15V DC。可设置的波特率为 230400/115200/19200/9600。COM-RTK 接口用于定位数据输出、命令输入以及固件升级, 默认波特率为 230400。COM-DEBUG 用于输出程序打印信息,默认波特率为 115200。
RS422接口
RS422 接口说明: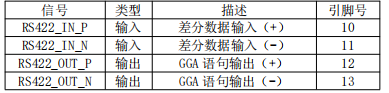
RS422 接口支持全双工模式,可设置的波特率为 115200(默认)/38400/19200/9600。 RS422 接口用于接收差分数据,同时输出 1Hz 的 GGA 数据用于向差分数据服务器报告心跳。
CAN接口
CAN 接口说明:
组合定位模块提供两个标准 CAN 接口,波特率最高可达到 5Mbps。CAN-HPP 用于输 入车辆数据如轮速和档位数据,CAN-RTK 用于输出定位数据或者 MEMS 传感器数据,也用 于 CAN 上位机的配置管理参数、标定管理参数和固件升级功能。
PPS秒脉冲
车载组合定位模块提供了一个可输出 1 秒/次脉冲功能的引脚 PPS。系统未锁星前 PPS 秒脉冲信号仅作参考,锁星后输出标准 1Hz 脉冲信号,默认脉宽是 1ms 高电平。PPS 秒脉冲精度为 20ns RMS。该信号电平 VOL<0.4V,VOH>2.8V 。该信号可用于作数据时间同步用。
引脚 PPS 说明:
信号输出如下图所示: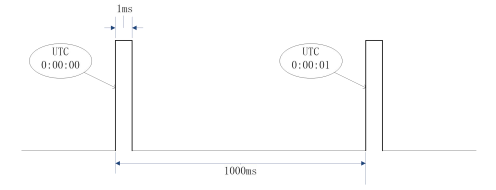
边栏推荐
- AcWing 361. Sightseeing cow problem solution (SPFA seeking positive ring)
- 微服务架构介绍
- Right mouse button customization
- BigDecimal 的正确使用方式
- Cat recycling bin
- Shortcut keys commonly used in idea
- ROS学习(21)机器人SLAM功能包——orbslam的安装与测试
- grep查找进程时,忽略grep进程本身
- AcWing 345. 牛站 题解(floyd的性质、倍增)
- New job insights ~ leave the old and welcome the new~
猜你喜欢
The cradle of eternity
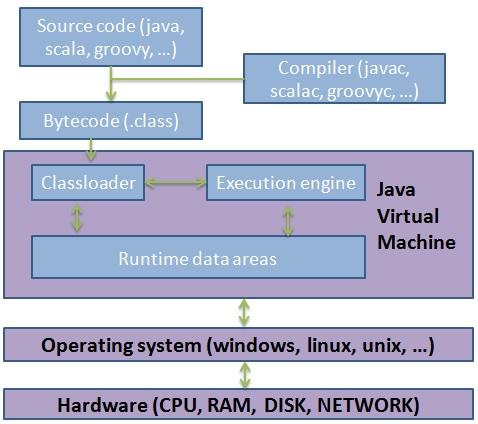
JVM 内存模型
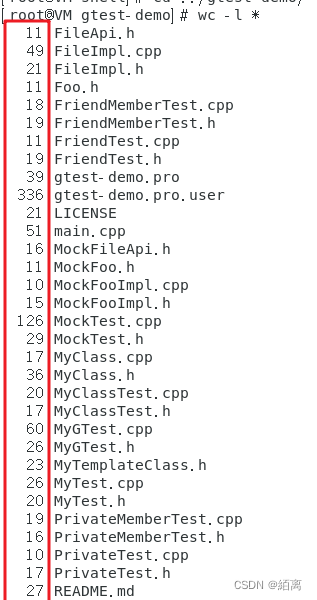
Shell script quickly counts the number of lines of project code
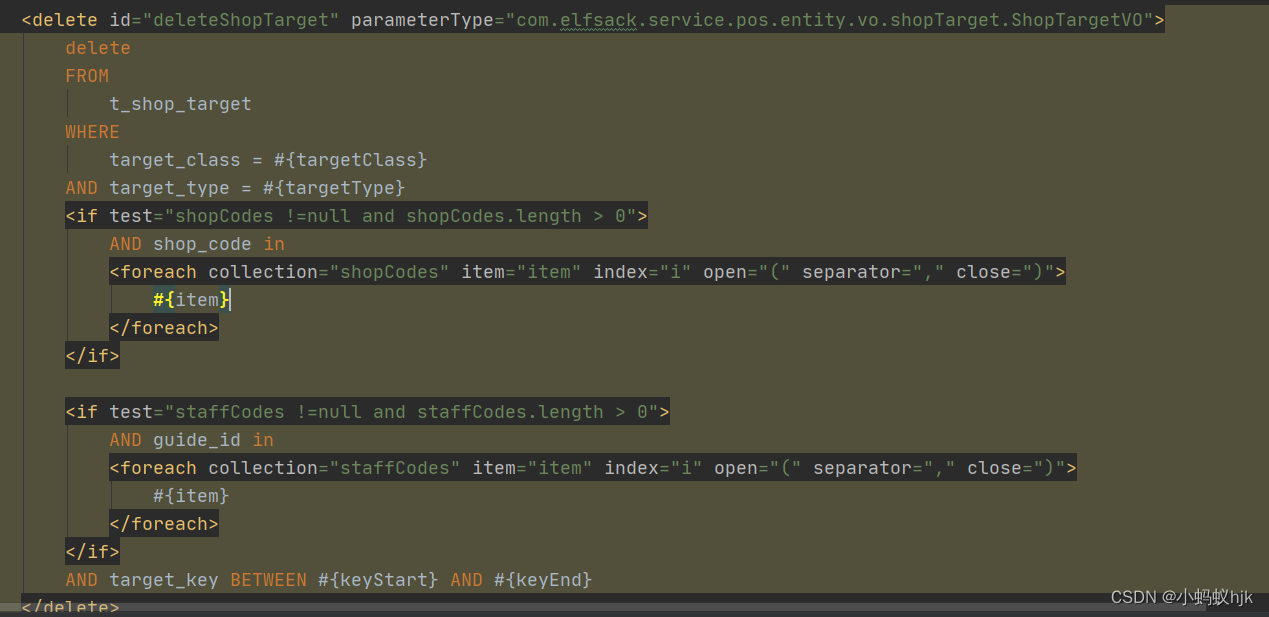
sql中批量删除数据---实体中的集合
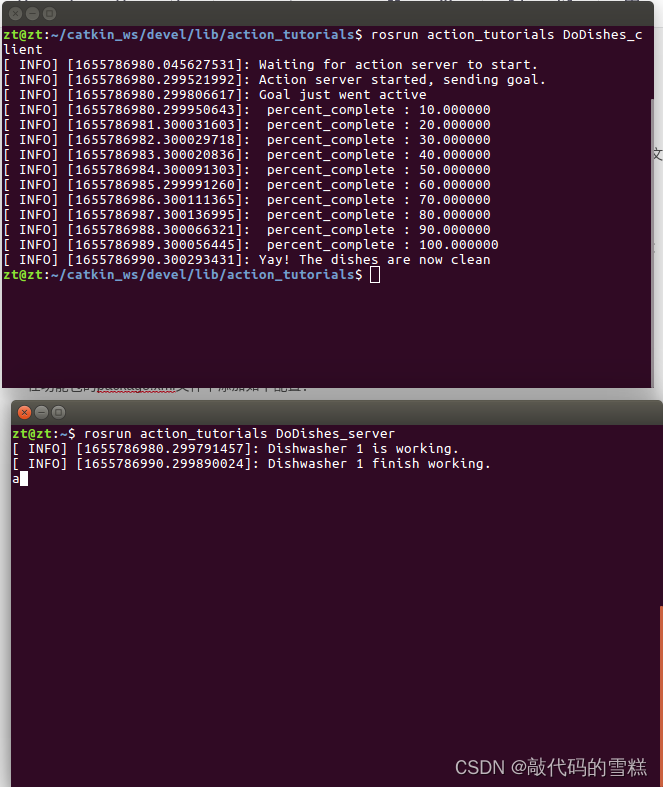
Ros Learning (23) Action Communication Mechanism

Right mouse button customization
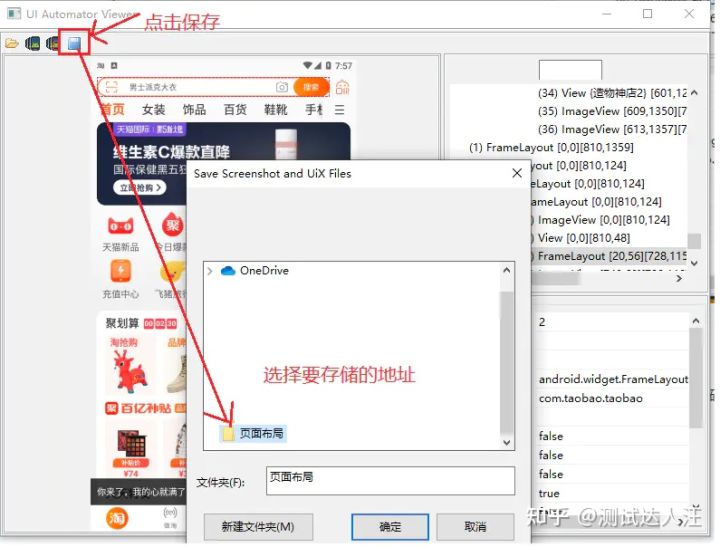
Appium自动化测试基础 — uiautomatorviewer定位工具

Correct use of BigDecimal

New job insights ~ leave the old and welcome the new~
![[unique] what is the [chain storage structure]?](/img/cd/be18c65b9d7faccc3c9b18e3b2ce8e.png)
[unique] what is the [chain storage structure]?
随机推荐
Domestic images of various languages, software and systems. It is enough to collect this warehouse: Thanks mirror
ROS learning (22) TF transformation
微服务架构介绍
Make DIY welding smoke extractor with lighting
Cat recycling bin
盒子拉伸拉扯(左右模式)
PartyDAO如何在1年内把一篇推文变成了2亿美金的产品DAO
Shortcut keys commonly used in idea
AcWing 346. Solution to the problem of water splashing festival in the corridor (deduction formula, minimum spanning tree)
Get to know MySQL for the first time
Yiwen takes you into [memory leak]
AcWing 1148. Secret milk transportation problem solution (minimum spanning tree)
蓝桥杯2022年第十三届省赛真题-积木画
Blue Bridge Cup 2022 13th provincial competition real topic - block painting
BigDecimal 的正确使用方式
Appium自动化测试基础 — uiautomatorviewer定位工具
AcWing 904. 虫洞 题解(spfa求负环)
centos8安裝mysql報錯:The GPG keys listed for the “MySQL 8.0 Community Server“ repository are already ins
How did partydao turn a tweet into a $200million product Dao in one year
百度飞将BMN时序动作定位框架 | 数据准备与训练指南 (上)