当前位置:网站首页>ROS learning (22) TF transformation
ROS learning (22) TF transformation
2022-07-07 01:47:00 【Ice cream with code】
List of articles
Preface
There are a large number of component elements in the robot's local and robot's working environment , The position and posture of different components will be involved in the design and application of robots , This requires the introduction of the concept of coordinate system and coordinate transformation .
Coordinate transformation is a basic function commonly used in robot systems ,ROS The coordinate transformation system in is composed of TF Function pack maintenance .
One 、TF Function pack
TF It is a function package that allows users to track multiple coordinate systems over time , Use a tree data structure , Buffer and maintain coordinate transformation relations among multiple coordinate systems according to time , Help developers at any time 、 Complete points between coordinate systems 、 Transformation of coordinates such as vectors .
TF Can operate in a distributed system , All coordinate transformation relations in a robot system , All node components are available , All subscriptions TF The node of the message will buffer a transformation relationship data of all coordinate systems , So this structure does not need a central server to store any data .
Want to use TF Function pack , In general, it takes two steps :
- monitor TF Transformation
Receive and cache all coordinate transformation data published in the system , And query the required coordinate transformation relationship . - radio broadcast TF Transformation
Broadcast the coordinate transformation relationship between coordinate systems in the system . There may be many different parts of the system TF Change broadcast , Each broadcast can directly insert the coordinate system transformation relationship TF In the tree , No more synchronization is needed .
Two 、TF Tools
The coordinate system involves the transformation between multiple spaces , Not easy to abstract , therefore TF It provides rich terminal tools to help developers debug and create TF Transformation .
1、tf_monitor
1) For printing TF Release status of all coordinate systems in the tree
rosrun tf tf_monitor
2) View the publishing status between the specified coordinate systems
rosrun tf tf_monitor <source_frame> <target_frame>
2、tf_echo
Used to view the transformation relationship between specified coordinate systems
rosrun tf tf_echo <source_frame> <target_frame>
3、static_transform_publisher
Used to publish static coordinate transformations between two coordinate systems , The relative position of these two coordinate systems does not change . The tool needs to set the offset parameters and rotation parameters of coordinates , The frequency of release is ms In units of .
There are two formats for commands , as follows :
1) The rotation parameter uses yaw/pitch/roll angle
rosrun tf static_transform_publisher x y x yaw pitch roll frame_id child_frame_id period_in_ms
2) The rotation parameter uses quaternions
rosrun tf static_transform_publisher x y x qx qy qw frame_id child_frame_id period_in_ms
This command can also be used in launch Use... In the document , as follows :
<launch>
<node pkg="tf" type="static_transform_publisher" name="link_broadcaster" args="1 0 0 0 0 0 1 link_parent link 100" />
<launch>
4、view_frames
view_frames It is a visual debugging tool , Can generate pdf file , Show TF Tree information . The order is as follows :
rosrun tf view_frames
see pdf file , You can use the following command :
evince frames.pdf
3、 ... and 、 Turtle routine TF
Mainly used to understand TF The role of , And be familiar with the above TF Tool use , Feature Pack name is turtle_tf, The function pack installation commands are as follows :
sudo apt-get install ros-kinetic-turtle-tf
function turtle_tf Function pack , The order is as follows :
roslaunch turtle_tf turtle_tf_demo.launch
Open the keyboard control node , The order is as follows :
rosrun turtlesim turtle_teleop_key
The effect is as follows :
You can find , There are two turtles , Use the keyboard direction keys to control a turtle to move , You will find another turtle will follow the movement .
Its TF The trees are as follows :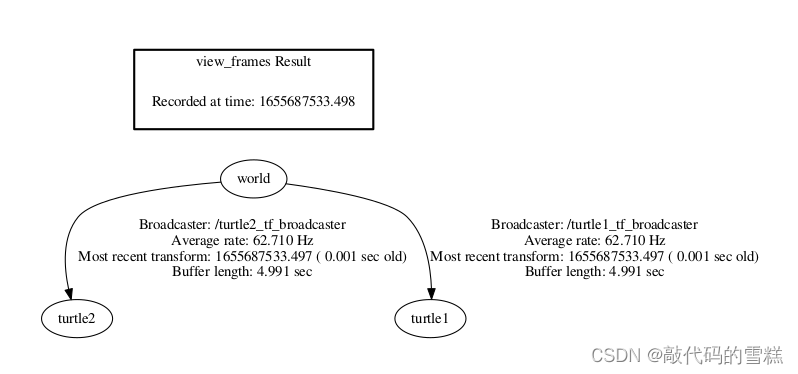
As shown above , There are three coordinate systems in the current system , Time coordinate system world、 Tortoise coordinate system turtle1 And tortoise coordinate system turtle2.
The world coordinate system is the basic coordinate system of the system , Other coordinate systems are established relative to this coordinate system , therefore world yes TF Root node of tree , The origin of the two tortoise coordinate systems is the coordinate position of the tortoise in the world coordinate system .
You can use the following command , Check the transformation relationship between the two tortoise coordinate systems :
rosrun tf tf_monitor turtle1 turtle2
The effect is as follows :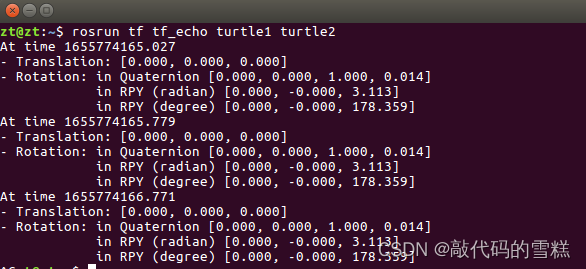
Four 、 Tortoise follows the routine code
Now let turtle2 Follow turtle1 motion , Equivalent to turtle2 The coordinate system is oriented to turtle1 Coordinate system movement , First new learning_tf Function pack .
1、 establish TF Broadcaster
Create a node , It is mainly used to publish the relationship between tortoise coordinate system and world coordinate system TF Transformation ,turtle_tf_broadcaster.cpp The contents are as follows :
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <turtlesim/Pose.h>
std::string turtle_name;
void poseCallback(const turtlesim::PoseConstPtr& msg)
{
// tf Broadcaster
static tf::TransformBroadcaster br;
// According to the turtle's current posture , Sets the coordinate transformation relative to the world coordinate system
tf::Transform transform;
// Set translation transform
transform.setOrigin( tf::Vector3(msg->x, msg->y, 0.0) );
tf::Quaternion q;
q.setRPY(0, 0, msg->theta);
// Set rotation transform
transform.setRotation(q);
// Insert coordinate transformation TF Tree and publish coordinate transformation
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", turtle_name));
}
int main(int argc, char** argv)
{
// Initialize node
ros::init(argc, argv, "my_tf_broadcaster");
if (argc != 2)
{
ROS_ERROR("need turtle name as argument");
return -1;
};
turtle_name = argv[1];
// Subscribe to turtle's pose Information
ros::NodeHandle node;
ros::Subscriber sub = node.subscribe(turtle_name+"/pose", 10, &poseCallback);
ros::spin();
return 0;
};
2、 establish TF Monitor
Create a node , Mainly used for monitoring TF news , Get from turtle2 be relative to turtle1 Transformation of coordinate system , To control turtle2 The movement of the .turtle_tf_listener.cpp The contents are as follows :
#include <ros/ros.h>
#include <tf/transform_listener.h>
#include <geometry_msgs/Twist.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
// Initialize node
ros::init(argc, argv, "my_tf_listener");
ros::NodeHandle node;
// Call through service , Produce a second turtle turtle2
ros::service::waitForService("spawn");
ros::ServiceClient add_turtle =
node.serviceClient<turtlesim::Spawn>("spawn");
turtlesim::Spawn srv;
add_turtle.call(srv);
// Definition turtle2 Speed control publisher
ros::Publisher turtle_vel =
node.advertise<geometry_msgs::Twist>("turtle2/cmd_vel", 10);
// tf Monitor
tf::TransformListener listener;
// The listener will automatically receive TF Tree messages , And cache 10 second
ros::Rate rate(10.0);
while (node.ok())
{
tf::StampedTransform transform;
try
{
// lookup turtle2 And turtle1 Coordinate transformation of
listener.waitForTransform("/turtle2", "/turtle1", ros::Time(0), ros::Duration(3.0));
listener.lookupTransform("/turtle2", "/turtle1", ros::Time(0), transform);
}
catch (tf::TransformException &ex)
{
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}
// according to turtle1 and turtle2 Coordinate transformation between , Calculation turtle2 The linear velocity and angular velocity of motion are required
// And issue speed control instructions , send turtle2 towards turtle1 Move
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(),
transform.getOrigin().x());
vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) +
pow(transform.getOrigin().y(), 2));
turtle_vel.publish(vel_msg);
rate.sleep();
}
return 0;
};
3、 Realize tortoise following movement
To write start_demo_with_listener.launch file , The contents are as follows :
<launch>
<!-- Turtle simulator -->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<!-- Keyboard control -->
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<!-- Two turtles tf radio broadcast -->
<node pkg="learning_tf" type="turtle_tf_broadcaster"
args="/turtle1" name="turtle1_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_broadcaster"
args="/turtle2" name="turtle2_tf_broadcaster" />
<!-- monitor tf radio broadcast , And control turtle2 Move -->
<node pkg="learning_tf" type="turtle_tf_listener"
name="listener" />
</launch>
Run the following command :
roslaunch learning_tf start_demo_with_listener.launch
The effect is as follows :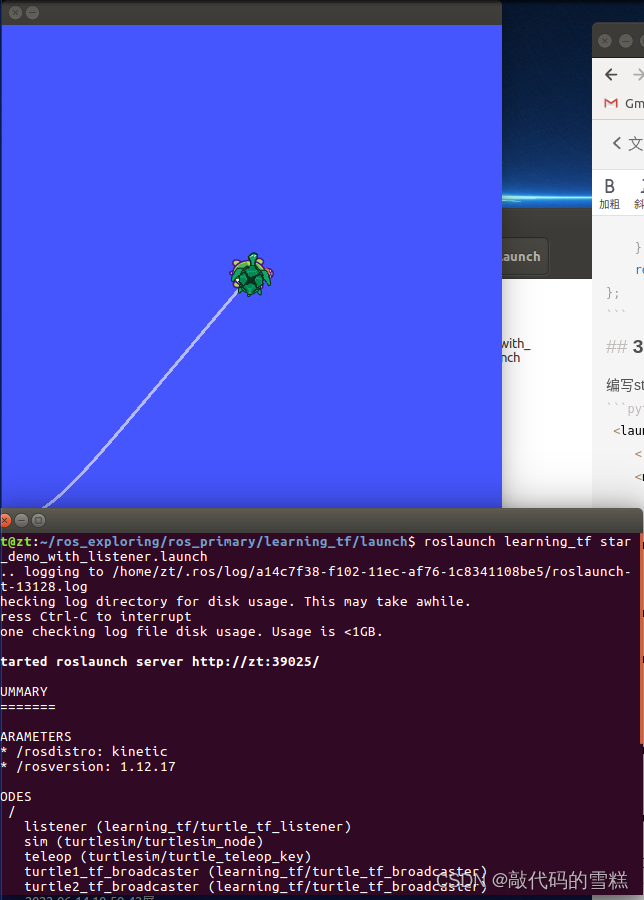
Open the keyboard control node , The order is as follows :
rosrun turtlesim turtle_teleop_key
Follow the effect as follows :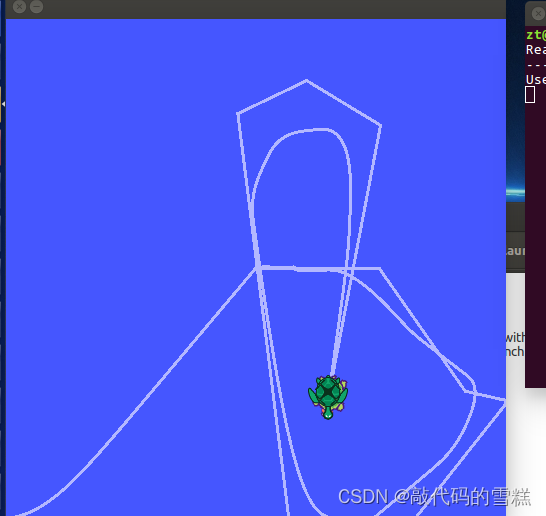
边栏推荐
- 今日问题-2022/7/4 lambda体中修改String引用类型变量
- tansig和logsig的差异,为什么BP喜欢用tansig
- Ds-5/rvds4.0 variable initialization error
- 增加 pdf 标题浮窗
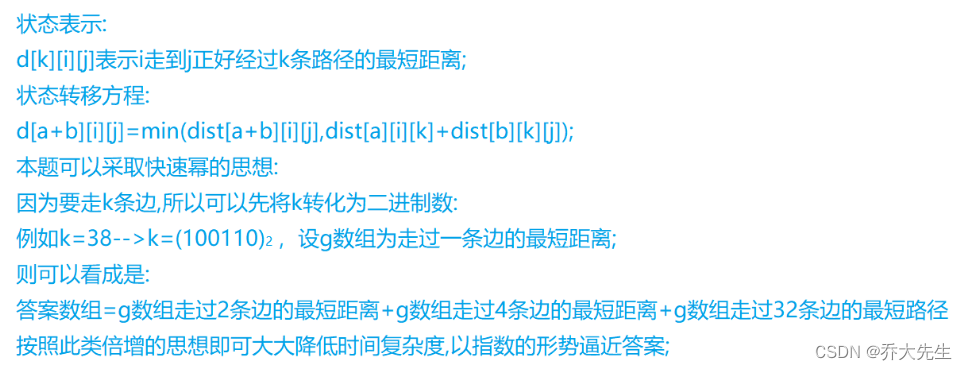
- AcWing 344. 观光之旅题解(floyd求无向图的最小环问题)
- AcWing 1140. 最短网络 (最小生成树)
- Curl command
- Baidu flying general BMN timing action positioning framework | data preparation and training guide (Part 1)
- grep查找进程时,忽略grep进程本身
- swiper组件中使用video导致全屏错位
猜你喜欢
js如何快速创建一个长度为 n 的数组
AcWing 345. 牛站 题解(floyd的性质、倍增)
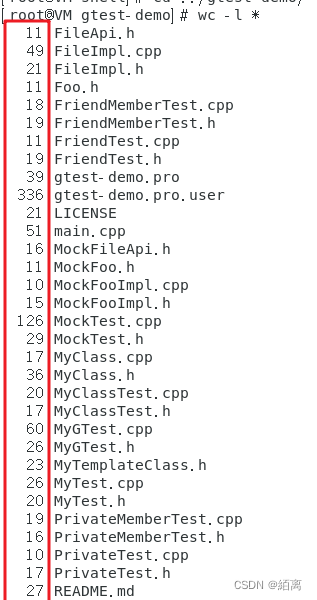
shell脚本快速统计项目代码行数
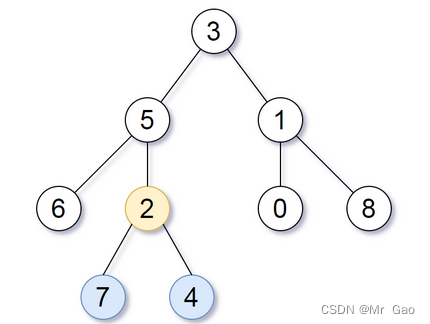
1123. The nearest common ancestor of the deepest leaf node

Blue Bridge Cup 2022 13th provincial competition real topic - block painting
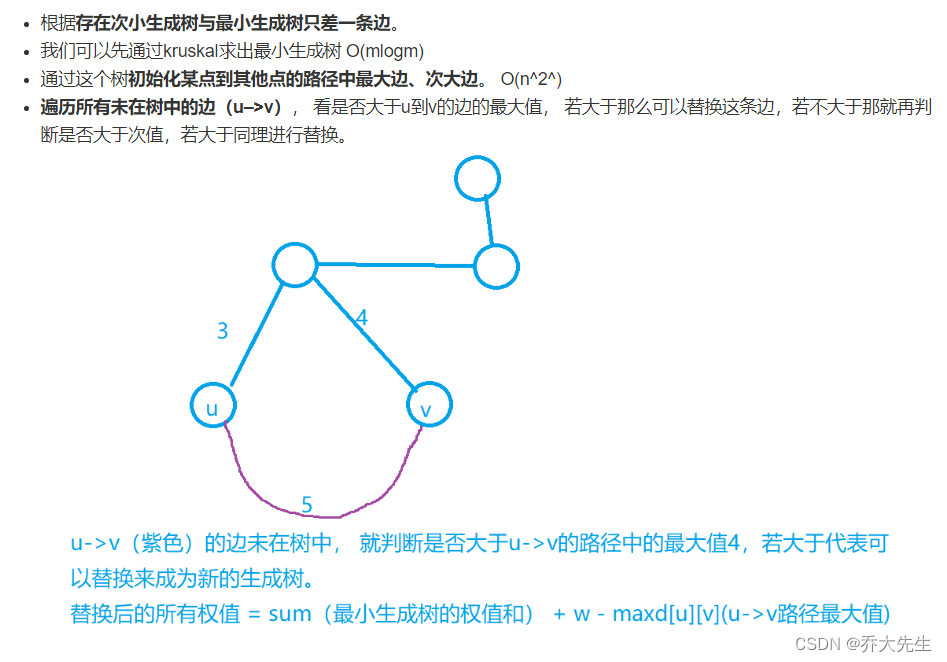
AcWing 1148. 秘密的牛奶运输 题解(最小生成树)

对C语言数组的再认识
![JS reverse -- ob confusion and accelerated music that poked the [hornet's nest]](/img/40/da56fe6468da64dd37d6b5b0082206.png)
JS reverse -- ob confusion and accelerated music that poked the [hornet's nest]
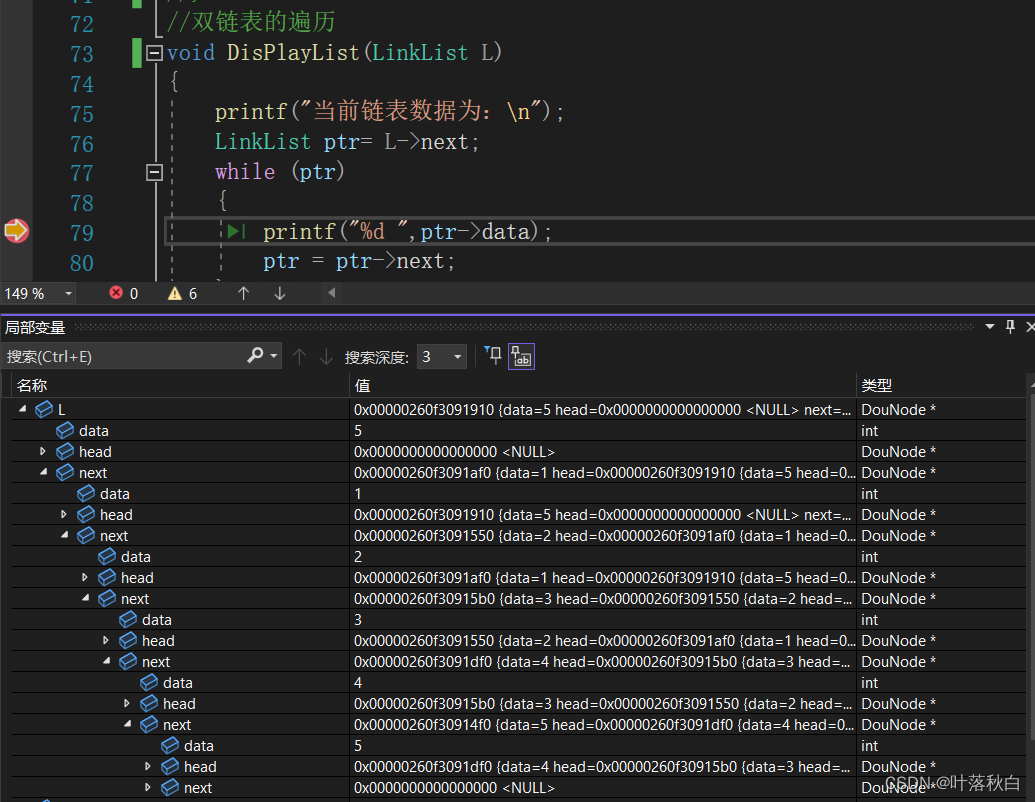
Can't you understand the code of linked list in C language? An article allows you to grasp the secondary pointer and deeply understand the various forms of parameter passing in the function parameter

454 Baidu Mianjing 1
随机推荐
WCF Foundation
Blue Bridge Cup 2022 13th provincial competition real topic - block painting
AcWing 1148. 秘密的牛奶运输 题解(最小生成树)
Related programming problems of string
对C语言数组的再认识
我如何编码8个小时而不会感到疲倦。
ROS学习(21)机器人SLAM功能包——orbslam的安装与测试
Compile command line terminal swift
Set WordPress pseudo static connection (no pagoda)
Public key \ private SSH avoid password login
C语言实例_3
长按按钮执行函数
Hutool post requests to set the body parameter to JSON data
使用nodejs完成判断哪些项目打包+发版
curl 命令
字符串转成日期对象
拖拽改变顺序
Reptile practice (VI): novel of climbing pen interesting Pavilion
C language instance_ three
Let's see how to realize BP neural network in Matlab toolbox