当前位置:网站首页>Brief introduction of realsense d435i imaging principle
Brief introduction of realsense d435i imaging principle
2022-07-03 05:18:00 【Qianyu QY】
Writing graduation thesis involves realsense d435i The imaging principle of the camera , After searching and comparing , The following conclusions are drawn .
First, let's take a look at the structure of this camera :
The picture is from :https://blog.csdn.net/lemonxiaoxiao/article/details/109297834
1、 Principle of color image imaging
RGB Monocular pinhole model of camera , The image below :

2、 Depth image imaging principle
Images based on left and right infrared cameras , use Triangulation Calculation . Because there are few feature points in some scenes , Therefore, the infrared dot matrix projector emits infrared dot matrix patterns into the scene ( People can't see , Infrared camera can capture ), Add feature points , Improve the imaging effect .
ROS The depth image published in is the same as that in the figure Right infrared camera The alignment of the , Left infrared 、 Right infrared 、 The depth map is shown in the following figure :
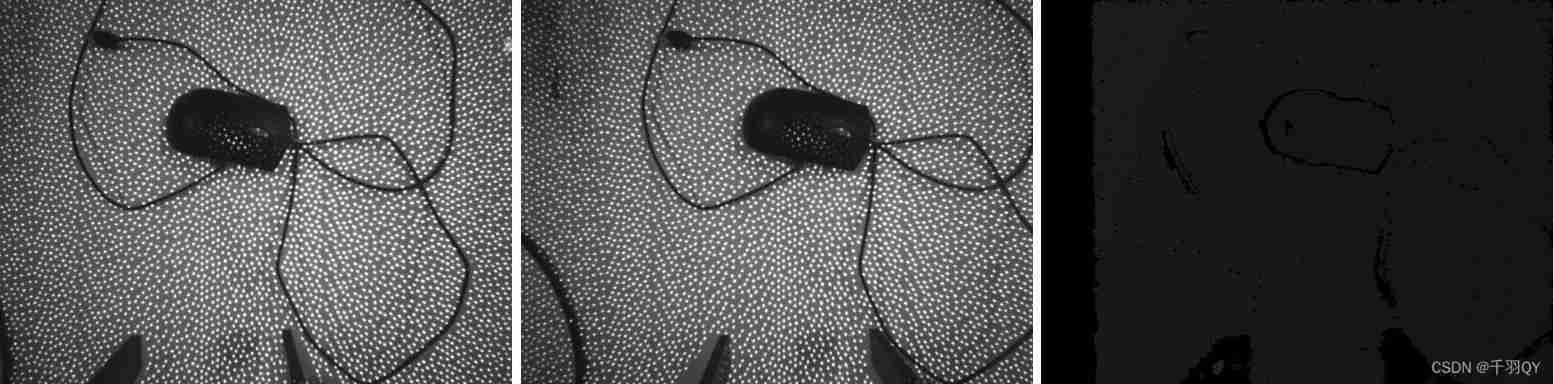
in addition ,realsense-ROS Released left infrared 、 Right infrared 、 Depth map 、 Internal parameters of color camera , And the internal parameters of the depth map aligned with the color map :
1、 Right infrared camera parameters
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [378.98150634765625, 0.0, 318.2408447265625, 0.0, 378.98150634765625, 241.04586791992188, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [378.98150634765625, 0.0, 318.2408447265625, 0.0, 0.0, 378.98150634765625, 241.04586791992188, 0.0, 0.0, 0.0, 1.0, 0.0]
2、 Left infrared camera parameters
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [378.98150634765625, 0.0, 318.2408447265625, 0.0, 378.98150634765625, 241.04586791992188, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [378.98150634765625, 0.0, 318.2408447265625, 18.91739845275879, 0.0, 378.98150634765625, 241.04586791992188, 0.0, 0.0, 0.0, 1.0, 0.0]
3、 Depth image parameters
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [378.98150634765625, 0.0, 318.2408447265625, 0.0, 378.98150634765625, 241.04586791992188, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [378.98150634765625, 0.0, 318.2408447265625, 0.0, 0.0, 378.98150634765625, 241.04586791992188, 0.0, 0.0, 0.0, 1.0, 0.0]
4、 Color camera parameters
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [613.4265747070312, 0.0, 329.3377990722656, 0.0, 613.5404663085938, 243.68722534179688, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [613.4265747070312, 0.0, 329.3377990722656, 0.0, 0.0, 613.5404663085938, 243.68722534179688, 0.0, 0.0, 0.0, 1.0, 0.0]
5、 Parameters of depth aligned color map
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [613.4265747070312, 0.0, 329.3377990722656, 0.0, 613.5404663085938, 243.68722534179688, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [613.4265747070312, 0.0, 329.3377990722656, 0.0, 0.0, 613.5404663085938, 243.68722534179688, 0.0, 0.0, 0.0, 1.0, 0.0]It can be seen that , The parameters of the depth image are the same as those of the right infrared camera , It can also be proved that the depth image is consistent with Right infrared camera alignment . in addition , Parameters of depth map aligned with color map The parameters are the same as those of the color camera .
It is worth noting that ,ROS Depth images are also released to color cameras 、 Left infrared 、 External parameter of right infrared :
6、depth->color External reference
rotation: [0.9999861717224121, 0.0002028869348578155, -0.005260064732283354, -0.0001973225735127926, 0.9999994039535522, 0.0010583496186882257, 0.005260276608169079, -0.0010572969913482666, 0.9999856352806091]
translation: [0.014868799597024918, -3.15127799694892e-05, 0.0001727673807181418]
7、depth-> Right infrared External reference
rotation: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
translation: [0.0, 0.0, 0.0]
8、depth-> Left infrared External reference
rotation: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
translation: [0.0, 0.0, 0.0]There is no problem with the external parameters from the depth map to the color camera , But the external parameters of the two infrared cameras are the same , According to the above conclusion , The external parameter from the depth map to the right infrared is the unit rotation matrix +0 translation , But the external parameter to the left infrared should not 0 translation ( I didn't think clearly why ).
边栏推荐
- Introduction to rust Foundation (basic type)
- The IntelliJ platform completely disables the log4j component
- Disassembly and installation of Lenovo r7000 graphics card
- Ueditor, FCKeditor, kindeditor editor vulnerability
- 1115 counting nodes in a BST (30 points)
- 【批处理DOS-CMD命令-汇总和小结】-CMD窗口的设置与操作命令-关闭cmd窗口、退出cmd环境(exit、exit /b、goto :eof)
- Why is go language particularly popular in China
- My first Smartphone
- JS function algorithm interview case
- Redis breakdown penetration avalanche
猜你喜欢

DEX net 2.0 for crawl detection
Differences among bio, NiO and AIO

Pessimistic lock and optimistic lock of multithreading

Go practice -- gorilla / websocket used by gorilla web Toolkit
Go practice -- factory mode of design patterns in golang (simple factory, factory method, abstract factory)

Handler understands the record

大学校园IP网络广播-厂家基于校园局域网的大学校园IP广播方案设计指南

Celebrate the new year together

酒店公共广播背景音乐-基于互联网+的酒店IP网络广播系统设计

联想R7000显卡的拆卸与安装
随机推荐
Introduction to redis and explanation of data types
Web APIs exclusivity
Webrtc native M96 version opening trip -- a reading code download and compilation (Ninja GN depot_tools)
Webrtc M96 release notes (SDP abolishes Plan B and supports opus red redundant coding)
study hard and make progress every day
Covering Safari and edge, almost all mainstream browsers have realized webgl 2.0 support
Transferring images using flask
[practical project] autonomous web server
Detailed explanation of yolov5 training own data set
Interview question -- output the same characters in two character arrays
leetcode435. Non overlapping interval
appium1.22.x 版本后的 appium inspector 需单独安装
在PyCharm中配置使用Anaconda环境
[research materials] 2021 China's game industry brand report - Download attached
BIO、NIO、AIO区别
1087 all roads lead to Rome (30 points)
Webrtc protocol introduction -- an article to understand ice, stun, NAT, turn
酒店公共广播背景音乐-基于互联网+的酒店IP网络广播系统设计
ES7 easy mistakes in index creation
"Pthread.h" not found problem encountered in compiling GCC