当前位置:网站首页>Off grid control of three-phase inverter - PR control
Off grid control of three-phase inverter - PR control
2022-07-02 09:38:00 【Quikk】
List of articles
Three phase inverter control technology ——PR control
1 PR Introduction of control technology
Inverter control is often used PI control technology , and PI Control can only be achieved for constant values Tracking without static error . Therefore, it is necessary to rotate the three-phase voltage in the control 、 The current rotates to dq Control in a coordinate system ,dq At this time, the voltage and current are constant in the coordinate system , Good for PI Control tracking . First, let's see why PI The control can only track the constant value without static error .
Take the controlled object as the first-order inertia link 1 T s + 1 \frac{1}{Ts+1} Ts+11 , use PI Control to control , The transfer function is : k i + k p s k_i+\frac{k_p}{s} ki+skp , Design below Simulink The simulation system is shown in the figure below :
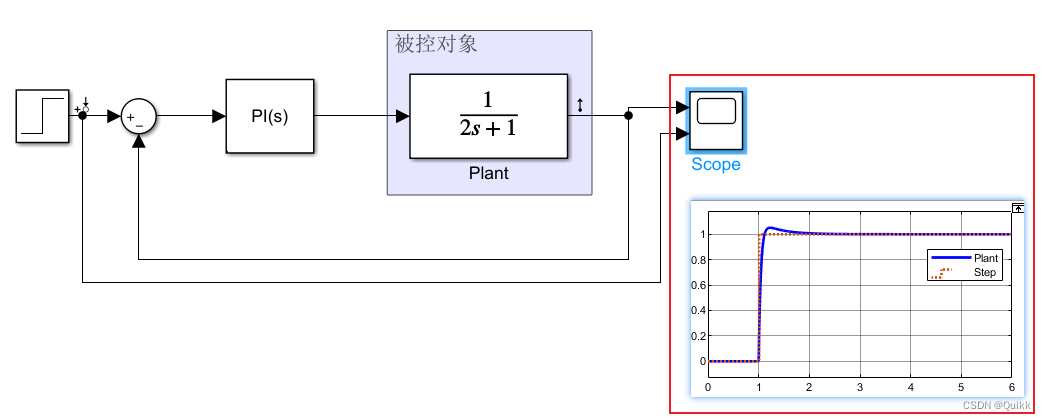
It can be found by adjusting PI Parameters , It can realize better tracking of step signal . Use Liner Analysis Tool Draw its closed loop Bode Tude :

It can be seen that when the input signal frequency is small , The system can realize the zero of amplitude and phase , But when the frequency of the input signal increases to a high frequency signal , Output signal amplitude and generation attenuation , Phase shift . The actual situation is tested as follows :

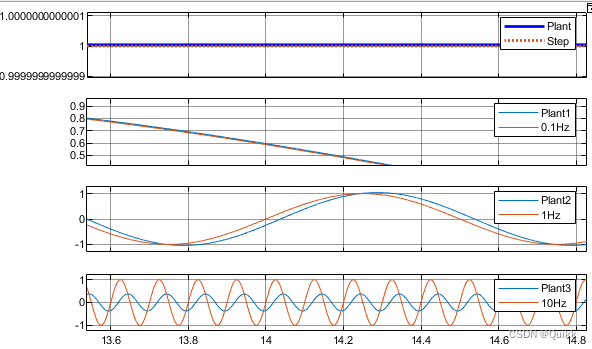
In the above process , It can be seen that when the input signal is DC component , The system can basically realize tracking without static error , When the output signal is AC component , The system output will produce an offset between amplitude and phase , And the higher the frequency , The greater the deviation between amplitude and phase . namely PI The control cannot realize the lossless tracking of AC signals , So you need to use PR The controller controls the AC signal .
2 PR Control the basic idea
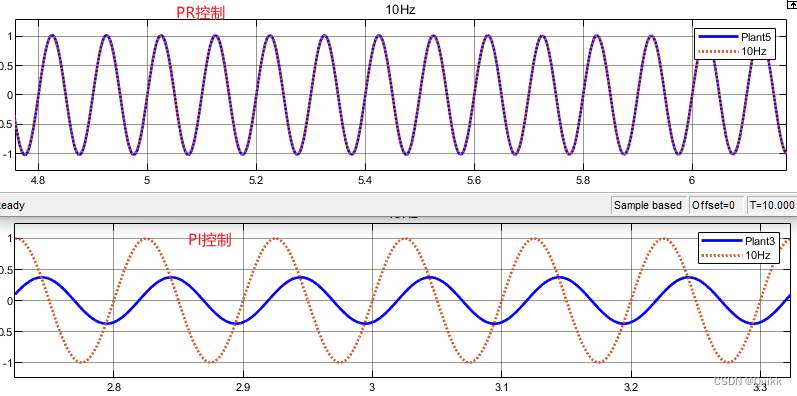
In order to realize no static error tracking of AC signal , Use PR The controller controls the system ;PR The controller is : The proportion + Resonance controller . Tradition PR The controller expression is : k p + 2 ∗ k r s s 2 + ω 0 2 k_p+\frac{2*k_rs}{s^2+{\omega_0}^2} kp+s2+ω022∗krs, In order to improve its control accuracy, there are expressions such as quasi resonant control , Different PR The controller is expressed for Achieve good frequency selection characteristics , That is to realize input signal tracking in various complex situations . Only the principle is explained here , A relatively simple PR For example, controller , It's about 10Hz The sinusoidal signal forms the following control system :

By adjusting the parameters , At this time, the output signal can track the input :
The basic control of three-phase inverter can be realized by using this control idea
3 inverter PR control
The expression of inverter in two-phase static coordinate system is :
{ [ d i α d t d i β d t d i 0 d t ] = 1 L [ U α U β U 0 ] − R L [ i α i β i 0 ] − 1 L [ U C α U C β U C 0 ] [ d U C α d t d U C β d t d U C 0 d t ] = 1 C [ i α i β i 0 ] − 1 C [ i g α i g β i g 0 ] \left\{ \begin{matrix}{} \left[ \begin{matrix}{} \frac{di_{\alpha}}{dt}\\ \frac{di_{\beta}}{dt}\\ \frac{di_0}{dt} \end{matrix} \right] = \frac{1}{L} \left[ \begin{matrix}{} U_{\alpha}\\ U_{\beta}\\ U_0\\ \end{matrix} \right] - \frac{R}{L} \left[ \begin{matrix}{} i_{\alpha}\\ i_{\beta}\\ i_0\\ \end{matrix} \right] - \frac{1}{L} \left[ \begin{matrix}{} U_{C\alpha}\\ U_{C\beta}\\ U_{C0}\\ \end{matrix} \right]\\ \left[ \begin{matrix}{} \frac{dU_{C\alpha}}{dt}\\ \frac{dU_{C\beta}}{dt}\\ \frac{dU_{C0}}{dt} \end{matrix} \right] = \frac{1}{C} \left[ \begin{matrix}{} i_{\alpha}\\ i_{\beta}\\ i_0\\ \end{matrix} \right] - \frac{1}{C} \left[ \begin{matrix}{} i_{g\alpha}\\ i_{g\beta}\\ i_{g0}\\ \end{matrix} \right] \end{matrix} \right. ⎩⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎧⎣⎡dtdiαdtdiβdtdi0⎦⎤=L1⎣⎡UαUβU0⎦⎤−LR⎣⎡iαiβi0⎦⎤−L1⎣⎡UCαUCβUC0⎦⎤⎣⎡dtdUCαdtdUCβdtdUC0⎦⎤=C1⎣⎡iαiβi0⎦⎤−C1⎣⎡igαigβig0⎦⎤
According to the above equation, Laplace transform can be obtained :
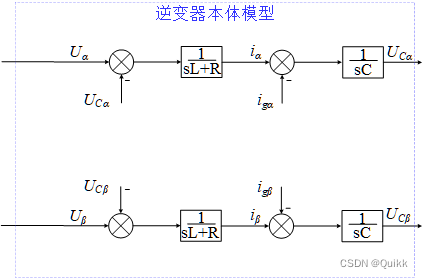
{ U c α = 1 s C ( i α − i g α ) i α = 1 s L + R ( U α − U c α ) \left\{ \begin{matrix}{} U_{c\alpha}=\frac{1}{sC}(i_{\alpha}-i_{g\alpha})\\ \\ i_{\alpha}=\frac{1}{sL+R}(U_{\alpha}-U_{c\alpha}) \end{matrix} \right. ⎩⎨⎧Ucα=sC1(iα−igα)iα=sL+R1(Uα−Ucα)
At this time, the mathematical model of the inverter is shown in the figure below :
In order to realize inverter PR control , The design is shown in the control block diagram below :

You can easily find ,PR The control can realize good tracking of sinusoidal signal in two-phase static coordinate system , Therefore, there is no need for additional structural control , be relative to PI Control optimizes the control mode .
build PR The control model is shown in the figure :

4 Experimental simulation test
Comparison between given voltage and output voltage :

Model links , I need to take it myself : Model links
边栏推荐
- College Students' CET-4 and CET-6 composition template (self created version, successfully crossed CET-6)
- MySQL default transaction isolation level and row lock
- Chrome浏览器插件-Fatkun安装和介绍
- Knowledge points are very detailed (code is annotated) number structure (C language) -- Chapter 3, stack and queue
- Navicat remote connection MySQL reports an error 1045 - access denied for user 'root' @ '222.173.220.236' (using password: yes)
- Don't look for it. All the necessary plug-ins for Chrome browser are here
- Alibaba / popular JSON parsing open source project fastjson2
- C语言之判断直角三角形
- tinyxml2 读取和修改文件
- Micro service practice | introduction and practice of zuul, a micro service gateway
猜你喜欢
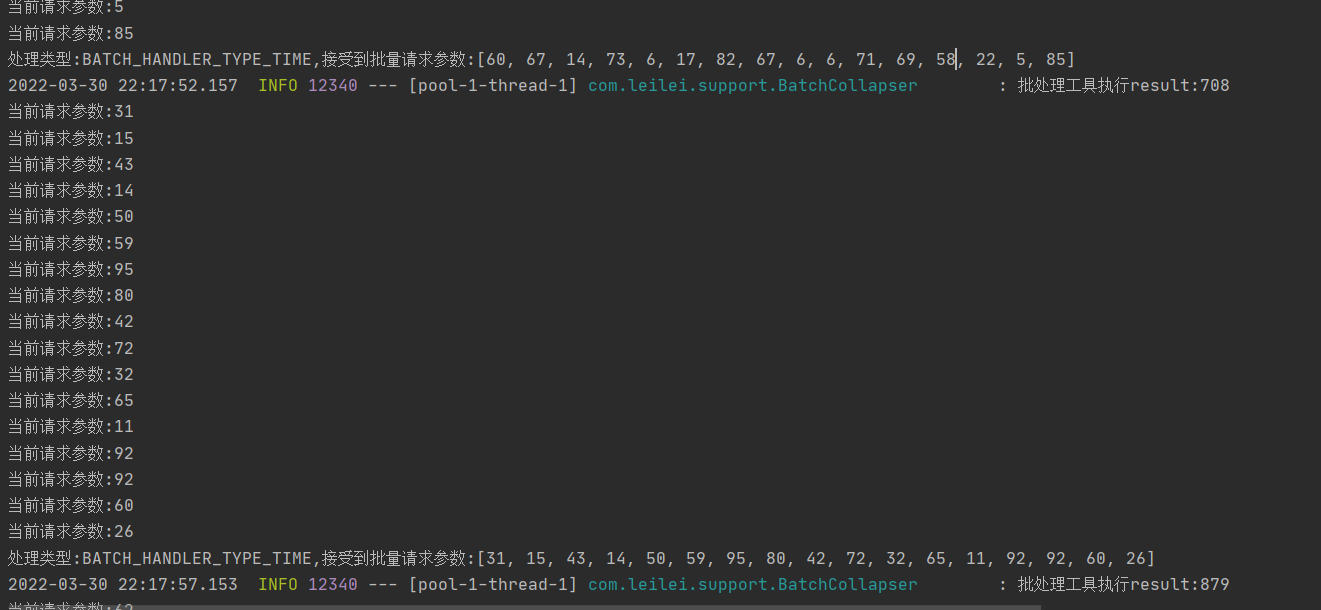
Timed thread pool implements request merging

Creation and jump of activity

ZK configuration center -- configuration and use of config Toolkit

Supplier selection and prequalification of Oracle project management system

Typora安装包分享
vs+qt 设置应用程序图标
Redis installation and deployment (windows/linux)

Microservice practice | Eureka registration center and cluster construction

In depth analysis of how the JVM executes Hello World

告别996,IDEA中必装插件有哪些?
随机推荐
每天睡觉前30分钟阅读_day3_Files
每天睡前30分钟阅读Day6_Day6_Date_Calendar_LocalDate_TimeStamp_LocalTime
并网逆变器PI控制(并网模式)
Statistical learning methods - Chapter 5, decision tree model and learning (Part 1)
Timed thread pool implements request merging
在SQL注入中,为什么union联合查询,id必须等于0
自定義Redis連接池
Probability is not yet. Look at statistical learning methods -- Chapter 4, naive Bayesian method
ZK configuration center -- configuration and use of config Toolkit
Redis 序列化 GenericJackson2JsonRedisSerializer和Jackson2JsonRedisSerializer的区别
In depth analysis of how the JVM executes Hello World
int与string、int与QString互转
Thinkphp5 how to determine whether a table exists
BugkuCTF-web16(备份是个好习惯)
微服务实战|Eureka注册中心及集群搭建
TD联合Modelsim进行功能仿真
JDBC回顾
微服务实战|熔断器Hystrix初体验
Machine learning practice: is Mermaid a love movie or an action movie? KNN announces the answer
Watermelon book -- Chapter 6 Support vector machine (SVM)