当前位置:网站首页>Autoware--北科天绘rfans激光雷达使用相机&激光雷达联合标定文件验证点云图像融合效果
Autoware--北科天绘rfans激光雷达使用相机&激光雷达联合标定文件验证点云图像融合效果
2022-08-05 05:18:00 【cql_cqu】
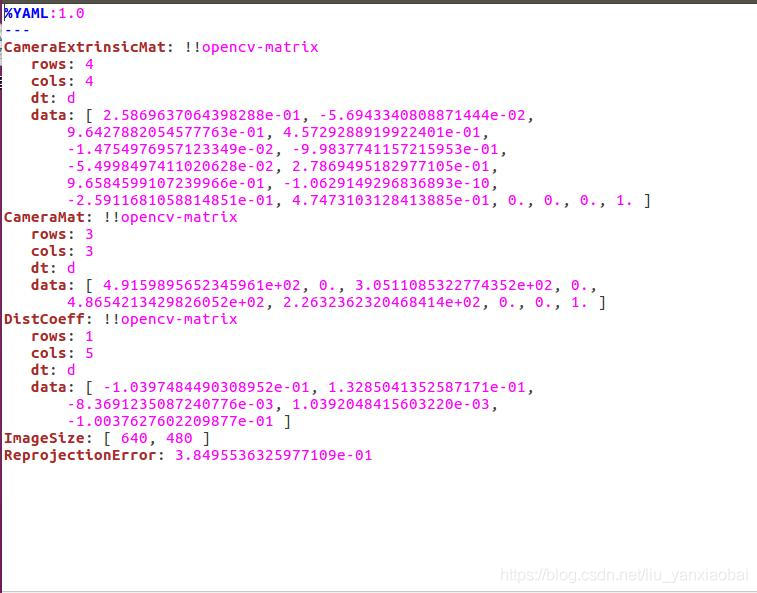
前期已使用Autoware联合标定工具箱CalibrationKit联合标定完成相机和激光雷达,得到标定后的YAML标定文件,包含内外参,如下图所示。
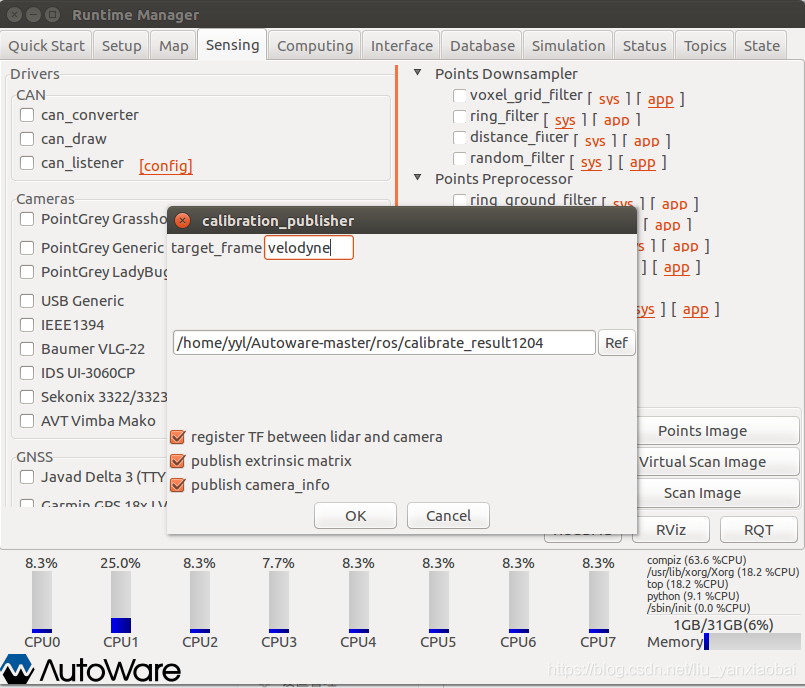
首先点Autoware->Sensing->Calibration Publisher加载YAML文件,此处注意左下角三项都得勾选,如下图,然后点Points Image加载节点/usb_cam,点击下方的RVIZ进入,在Panels选择add new plugin将ImageViewPlugin加载出来,分别选择/usb_cam/image_raw和point_image两个话题(前提是要播放录制的bag文件时才会有话题信息)。继续播放bag文件时出现问题:ImageViewPlugin中只有图像没有点云信息,查找原因,应该是录制的话题消息没有加载进来。
解决方法如下:因为用自己的激光雷达rfans16而非Autoware中指定的雷达,所以需要修改相应的节点话题消息。
修改1:将路径/home/yyl/Autoware-master/ros/src/sensing/fusion/packages/points2image/nodes/points2image这个路径下的points2image.cpp中points_topic = "/points_raw";改成自己的话题:points_topic = "/rfans_driver/rfans_points";
修改2:将路径/home/yyl/Autoware-master/ros/src/util/packages/runtime_manager/scripts这个路径下的points2image.launch文件中的<remap from="/points_raw" to="/sync_drivers/points_raw" if="$(arg sync)" /> 改为 <remap from="/rfans_driver/rfans_points" to="/sync_drivers/points_raw" if="$(arg sync)" />
修改以上两点,即可验证Autoware联合标定后的点云和图像融合信息,如下图(由于实验录制bag文件时激光雷达旋转问题,出现点云与图像成90度角度,后续实验还需注意及改进)。另外,修改过程中还需要特别注意的两点:
注意1:最最重要的是每次运行前在都得在~/Autoware-master/ros$路径下source一下!
注意2:Autoware->Sensing->Calibration Publisher->需要将左下角三个全部勾选(1.register TF between lidar and camera 2.publish extrinsic matrix 2.publish camera_info)

刚开始做相机和激光雷达信息融合,还有许多没注意到的问题,期待各位交流指教。
边栏推荐
- 【shell编程】第二章:条件测试语句
- 偷题——腾讯游戏开发面试问题及解答
- 每日一题-单调栈
- 常用 crud 的思考和设计
- 每日一题-两数相加-0711
- [Kaggle project actual combat record] Steps and ideas sharing of a picture classification project - taking leaf classification as an example (using Pytorch)
- 【UiPath2022+C#】UiPath数据类型
- Redis设计与实现(第三部分):多机数据库的实现
- 【ts】typescript高阶:键值类型及type与interface区别
- 网络信息安全运营方法论 (中)
猜你喜欢

随机推荐
5G中切片网络的核心技术FlexE
OSPF网络类型
CAN、CAN FD
如何用UE5渲染一个可爱的茶壶屋?
每日一题-二分法
LeetCode刷题之第86题
【UiPath2022+C#】UiPath数据类型
Lua,ILRuntime, HybridCLR(wolong)/huatuo热更对比分析
【UiPath2022+C#】UiPath变量和参数
[Kaggle project actual combat record] Steps and ideas sharing of a picture classification project - taking leaf classification as an example (using Pytorch)
[Intensive reading of the paper] R-CNN's Bounding box regression problem is detailed
C语言联合体union占用空间大小问题
C语言入门笔记 —— 分支与循环
IT系统运行维护方法及策略
UiPath简介
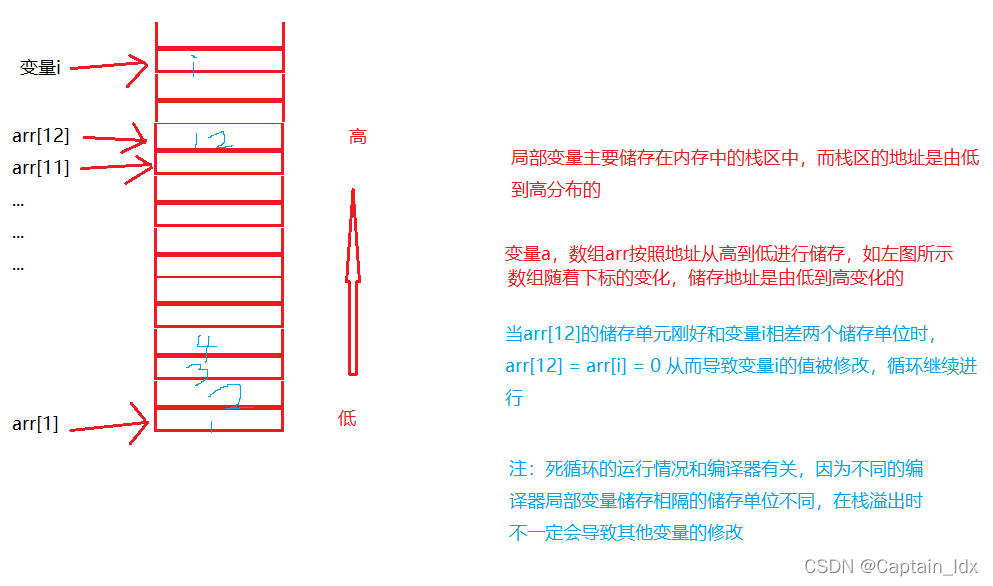
栈区中越界可能造成的死循环可能
D46_给刚体施加的力
二、自动配置之底层注解
【ts】typescript高阶:映射类型与keyof
阿里云视频点播