当前位置:网站首页>[trio basic tutorial 17 from getting started to mastering] set up and connect the trio motion controller and input the activation code
[trio basic tutorial 17 from getting started to mastering] set up and connect the trio motion controller and input the activation code
2022-07-05 08:02:00 【Changjiang houlang blog】
Many new friends , Get the controller for the first time , I don't know how to connect . Some friends, the number of axes activated by the controller is limited , You need to activate additional axes or activate the robot 、IEC And so on .
Today's tutorial is to open the number of axes by hand , Do not need any technical skills , Business also handles this matter . Let's do it hand in hand .
1、 Connect the controller 24V Power Supply , Plug in the computer and controller network cable .
2、 Set computer local IP Address
1》 Control panel -》 The Internet and Internet-》 Network and Sharing Center

2》
Local connection settings IPV4
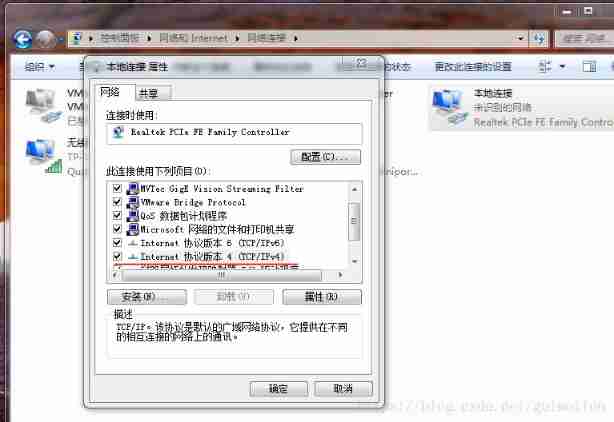

Set up IP Address , The controller address defaults to :192.168.0.250
Then we guarantee that the local computer and the controller are on the same network , You need to set IP:192.168.0.2 - 192.168.0.249
So here we're going to set theta 192.168.0.20 , Subnet mask :255.255.255.0
After confirming the settings, you can proceed to the next step
3、 Open the controller programming software Motion Profect V4 And establish the controller connection
》Controller -》Conncetion settings
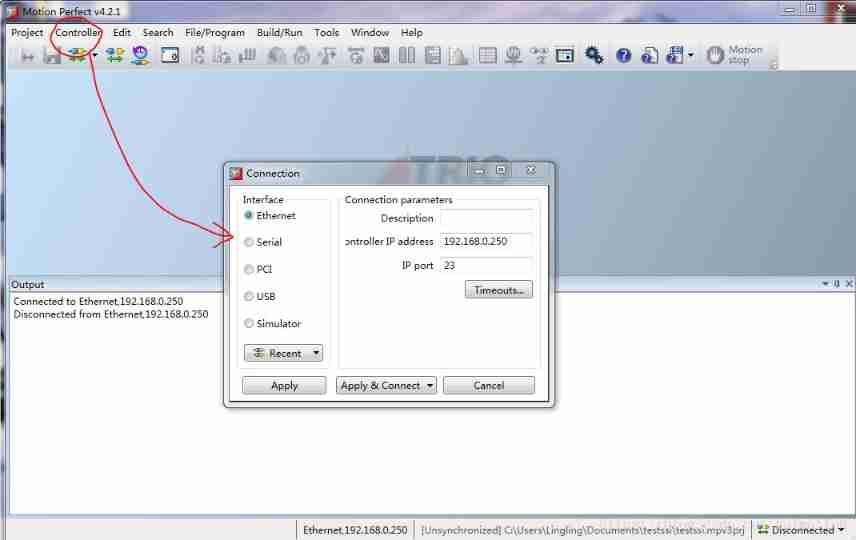
Apply & Connect ->Connect in tool mode
After entering the tool mode
Click on Controller-》Enable Features Enter the serial number input interface
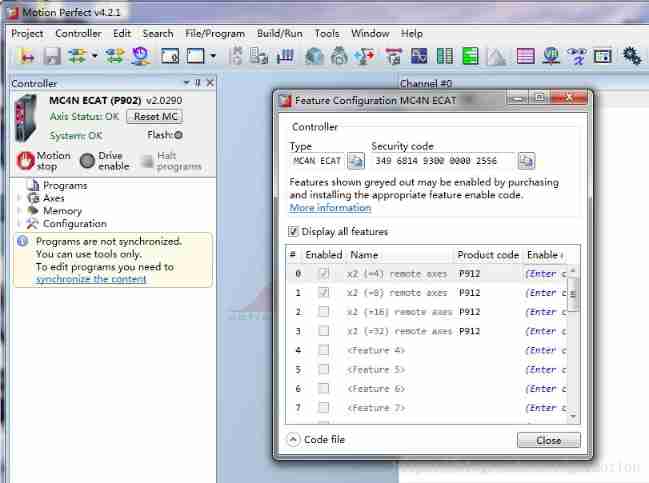
The serial number information obtained by continuous business is shown in the figure
Controller Type: MC4N ECAT (2 Axes) Motion Coordinator Controller Serial Number: P900-02556
Feature Code 0: 4L8AV6FQAE4U purchased this order P912 Remote Axes
Feature Code 1: DDVN7F2N0750 purchased this order P912 Remote Axes
Feature Code 2: XXXXXX P912 Remote Axes
Feature Code 3: XXXXXX P912 Remote Axes
Feature Code 21: XXXXXX P877 IEC
Feature Code 22: XXXXXX P750 Kinematic
Feature Code 31: XXXXXX P751 User Security
P900-02556 This is the controller serial number , After the controller security code 5 Bits can correspond to
Feature Code 0 The said code 0 Channel number
4L8AV6FQAE4U This expression corresponds to code Activation code
The input is shown in the figure below
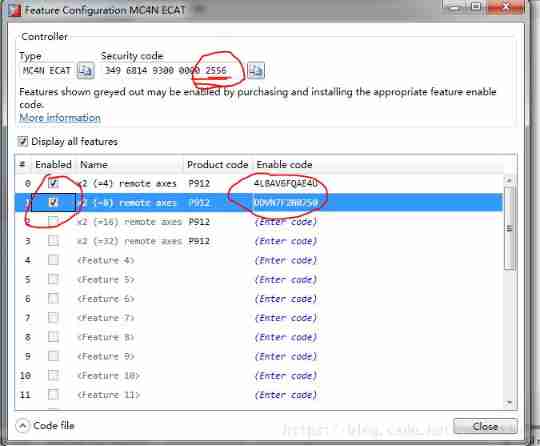
After input, the Enabled Check this column , Click on close To restart

After restarting the connection, you can check the open axis status in the direct connection mode
Enter the restart command in the channel :EX
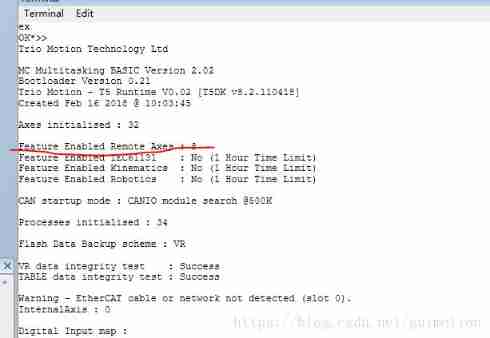
The activation code input information will be printed here , The above figure shows activation 8 Axis
The communication connection input activation code has been completed , Switching to a synchronous connection allows programming and other operations
Now you can start the journey of motion controller programming
This concludes the article , Thank you for your patience ....
边栏推荐
- Nb-iot technical summary
- Markdown tips
- UEFI development learning 5 - simple use of protocol
- Basic embedded concepts
- The research found that the cross-border e-commerce customer service system has these five functions!
- Global and Chinese markets for medical oxygen machines 2022-2028: Research Report on technology, participants, trends, market size and share
- Define in and define out
- C language enhancement -- pointer
- Pointnet++ classification practice
- Adaptive filter
猜你喜欢
![Halcon's practice based on shape template matching [1]](/img/68/206eed7502fbf108a929aa9365b1ae.jpg)
Halcon's practice based on shape template matching [1]

Application of ultra pure water particle counter in electronic semiconductors
Can't find real-time chat software? Recommend to you what e-commerce enterprises are using!
![Measurement fitting based on Halcon learning [i] fuse Hdev routine](/img/91/34c92065e797c87d6ce5ea13903993.jpg)
Measurement fitting based on Halcon learning [i] fuse Hdev routine
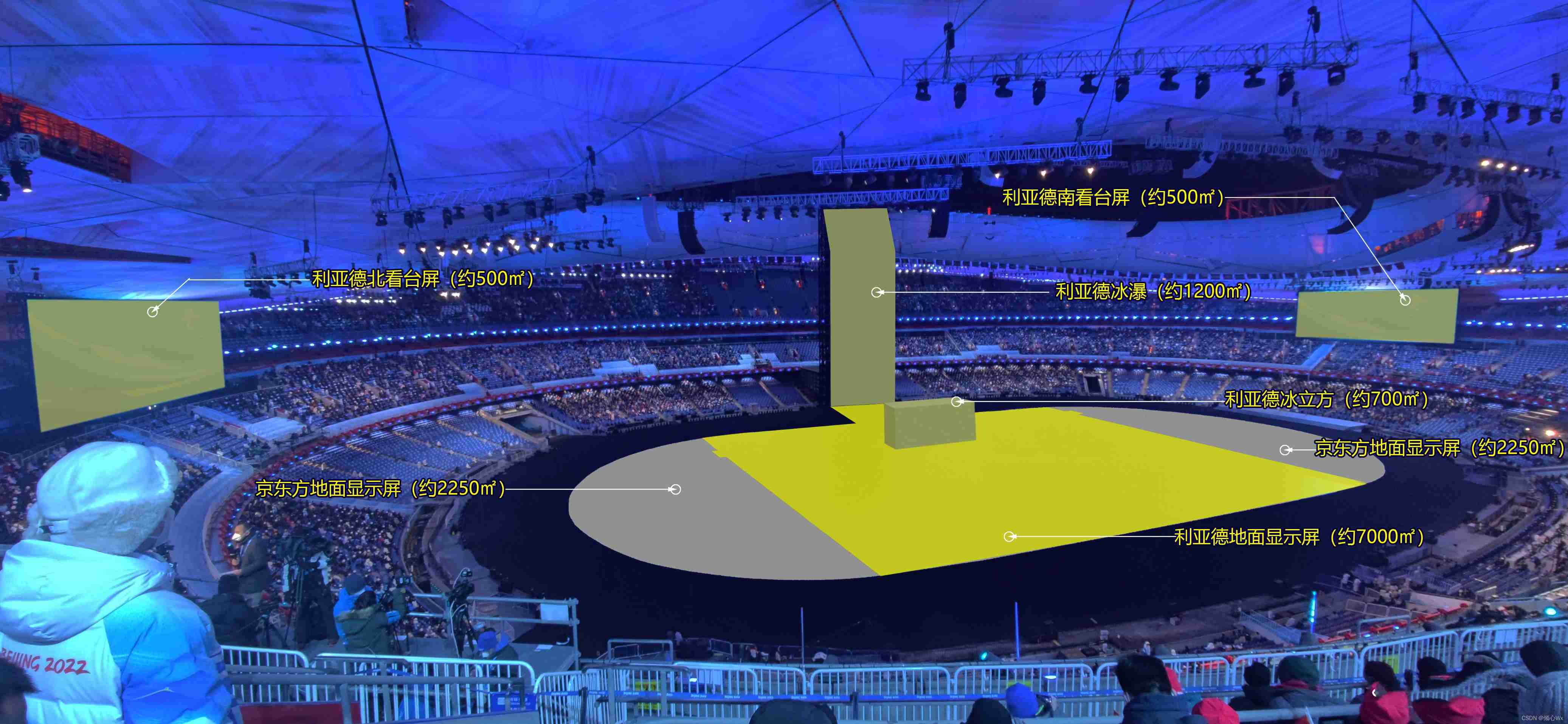
Record the visual shock of the Winter Olympics and the introduction of the screen 2

Wifi-802.11 negotiation rate table

Consul installation
Consul安装
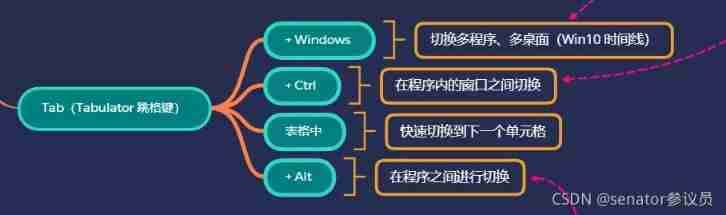
Win10 shortcut key

C language enhancement -- pointer
随机推荐
Global and Chinese markets for recycled boilers 2022-2028: Research Report on technology, participants, trends, market size and share
Matlab2018b problem solving when installing embedded coder support package for stmicroelectronic
1-stm32 operation environment construction
Global and Chinese market for blood typing 2022-2028: Research Report on technology, participants, trends, market size and share
Connection mode - bridge and net
L'étude a révélé que le système de service à la clientèle du commerce électronique transfrontalier a ces cinq fonctions!
Query the table name used by kettle in Oracle
How to realize audit trail in particle counter software
Summary -st2.0 Hall angle estimation
A simple method to prove 1/t Fourier transform
Detailed explanation of pragma usage
Ten thousand words detailed eight sorting must read (code + dynamic diagram demonstration)
Development tools -- gcc compiler usage
Altium Designer 19.1.18 - 更改铺铜的透明度
Global and Chinese market of peeled bourdon tubes 2022-2028: Research Report on technology, participants, trends, market size and share
2021-10-28
[popular science] some interesting things that I don't know whether they are useful or not
Define in and define out
C language enhancement -- pointer
Correlation based template matching based on Halcon learning [II] find_ ncc_ model_ defocused_ precision. hdev