当前位置:网站首页>Interesting practice of robot programming 15- autoavoidobstacles
Interesting practice of robot programming 15- autoavoidobstacles
2022-07-05 01:32:00 【zhangrelay】
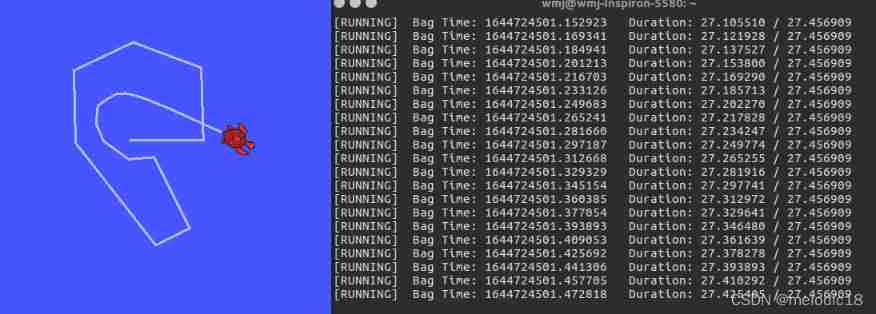
Before , Whether it's a two-dimensional platform , Or 3D platform , It's all controlled by keyboard , about turtlebot3 The robot is equipped with laser sensors , You can measure around 360 The distance between obstacles , This makes it very convenient to use it for autonomous driving to avoid obstacles .
Here the autonomous exercise is the most basic function, that is, to avoid obstacles in the environment, driving randomly in the open space .
Robot selection :
- export TURTLEBOT3_MODEL=burger
- export TURTLEBOT3_MODEL=waffle_pi
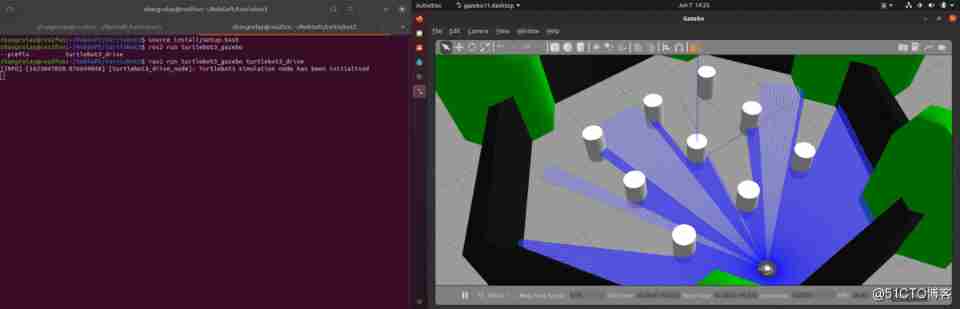
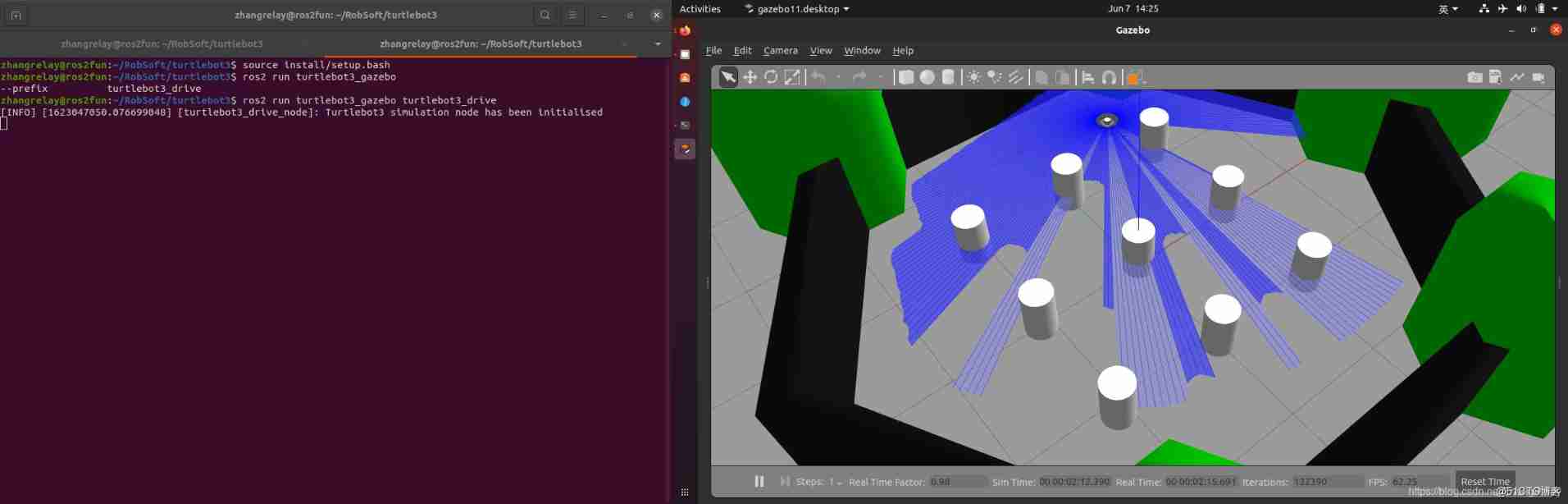
One out of two , Then you don't have to start the keyboard remote control node , Change to the following node :
- ros2 run turtlebot3_gazebo turtlebot3_drive
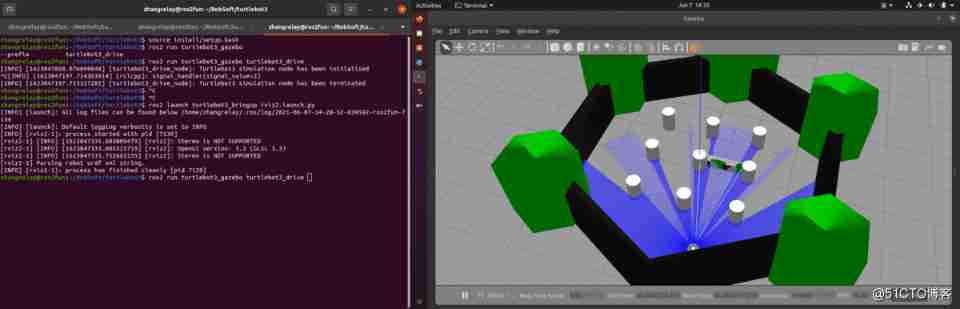
next , Continue to turn on 3D Visualization :
- ros2 launch turtlebot3_bringup rviz2.launch.py
The simulation software is Gazebo, The visualization tool is rviz, Don't use it wrong ^_^
get set
need ROS2+TurtleBot3 Simulation package .
practice
1 Basic commands
Need to master :
- ros2 run
- ros2 launch
Turn on the simulation environment and obstacle avoidance nodes .
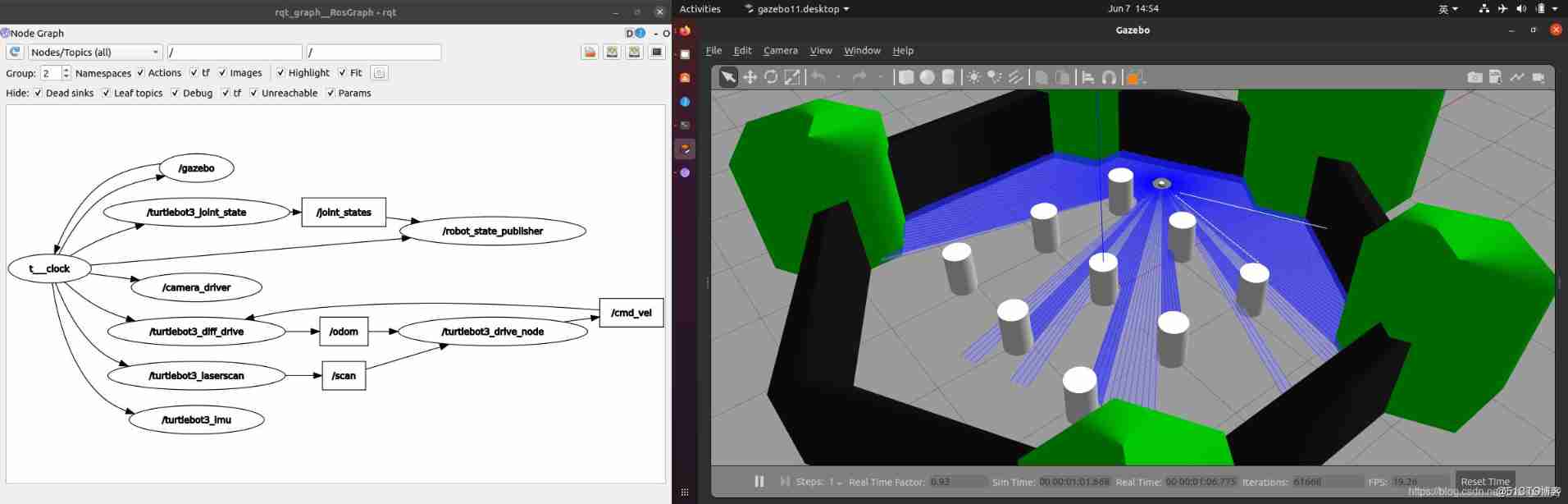
2 rqt Tools
Use rqt_graph Etc , Node information flow .
3 Source code reading
launch
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import LaunchConfiguration
TURTLEBOT3_MODEL = os.environ['TURTLEBOT3_MODEL']
def generate_launch_description():
use_sim_time = LaunchConfiguration('use_sim_time', default='true')
world_file_name = 'turtlebot3_worlds/' + TURTLEBOT3_MODEL + '.model'
world = os.path.join(get_package_share_directory('turtlebot3_gazebo'),
'worlds', world_file_name)
launch_file_dir = os.path.join(get_package_share_directory('turtlebot3_gazebo'), 'launch')
pkg_gazebo_ros = get_package_share_directory('gazebo_ros')
return LaunchDescription([
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(pkg_gazebo_ros, 'launch', 'gzserver.launch.py')
),
launch_arguments={'world': world}.items(),
),
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(pkg_gazebo_ros, 'launch', 'gzclient.launch.py')
),
),
IncludeLaunchDescription(
PythonLaunchDescriptionSource([launch_file_dir, '/robot_state_publisher.launch.py']),
launch_arguments={'use_sim_time': use_sim_time}.items(),
),
])
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
- 36.
- 37.
- 38.
drive
#include "turtlebot3_gazebo/turtlebot3_drive.hpp"
#include <memory>
using namespace std::chrono_literals;
Turtlebot3Drive::Turtlebot3Drive()
: Node("turtlebot3_drive_node")
{
/************************************************************
** Initialise variables
************************************************************/
scan_data_[0] = 0.0;
scan_data_[1] = 0.0;
scan_data_[2] = 0.0;
robot_pose_ = 0.0;
prev_robot_pose_ = 0.0;
/************************************************************
** Initialise ROS publishers and subscribers
************************************************************/
auto qos = rclcpp::QoS(rclcpp::KeepLast(10));
// Initialise publishers
cmd_vel_pub_ = this->create_publisher<geometry_msgs::msg::Twist>("cmd_vel", qos);
// Initialise subscribers
scan_sub_ = this->create_subscription<sensor_msgs::msg::LaserScan>(
"scan", \
rclcpp::SensorDataQoS(), \
std::bind(
&Turtlebot3Drive::scan_callback, \
this, \
std::placeholders::_1));
odom_sub_ = this->create_subscription<nav_msgs::msg::Odometry>(
"odom", qos, std::bind(&Turtlebot3Drive::odom_callback, this, std::placeholders::_1));
/************************************************************
** Initialise ROS timers
************************************************************/
update_timer_ = this->create_wall_timer(10ms, std::bind(&Turtlebot3Drive::update_callback, this));
RCLCPP_INFO(this->get_logger(), "Turtlebot3 simulation node has been initialised");
}
Turtlebot3Drive::~Turtlebot3Drive()
{
RCLCPP_INFO(this->get_logger(), "Turtlebot3 simulation node has been terminated");
}
/********************************************************************************
** Callback functions for ROS subscribers
********************************************************************************/
void Turtlebot3Drive::odom_callback(const nav_msgs::msg::Odometry::SharedPtr msg)
{
tf2::Quaternion q(
msg->pose.pose.orientation.x,
msg->pose.pose.orientation.y,
msg->pose.pose.orientation.z,
msg->pose.pose.orientation.w);
tf2::Matrix3x3 m(q);
double roll, pitch, yaw;
m.getRPY(roll, pitch, yaw);
robot_pose_ = yaw;
}
void Turtlebot3Drive::scan_callback(const sensor_msgs::msg::LaserScan::SharedPtr msg)
{
uint16_t scan_angle[3] = {0, 30, 330};
for (int num = 0; num < 3; num++) {
if (std::isinf(msg->ranges.at(scan_angle[num]))) {
scan_data_[num] = msg->range_max;
} else {
scan_data_[num] = msg->ranges.at(scan_angle[num]);
}
}
}
void Turtlebot3Drive::update_cmd_vel(double linear, double angular)
{
geometry_msgs::msg::Twist cmd_vel;
cmd_vel.linear.x = linear;
cmd_vel.angular.z = angular;
cmd_vel_pub_->publish(cmd_vel);
}
/********************************************************************************
** Update functions
********************************************************************************/
void Turtlebot3Drive::update_callback()
{
static uint8_t turtlebot3_state_num = 0;
double escape_range = 30.0 * DEG2RAD;
double check_forward_dist = 0.7;
double check_side_dist = 0.6;
switch (turtlebot3_state_num) {
case GET_TB3_DIRECTION:
if (scan_data_[CENTER] > check_forward_dist) {
if (scan_data_[LEFT] < check_side_dist) {
prev_robot_pose_ = robot_pose_;
turtlebot3_state_num = TB3_RIGHT_TURN;
} else if (scan_data_[RIGHT] < check_side_dist) {
prev_robot_pose_ = robot_pose_;
turtlebot3_state_num = TB3_LEFT_TURN;
} else {
turtlebot3_state_num = TB3_DRIVE_FORWARD;
}
}
if (scan_data_[CENTER] < check_forward_dist) {
prev_robot_pose_ = robot_pose_;
turtlebot3_state_num = TB3_RIGHT_TURN;
}
break;
case TB3_DRIVE_FORWARD:
update_cmd_vel(LINEAR_VELOCITY, 0.0);
turtlebot3_state_num = GET_TB3_DIRECTION;
break;
case TB3_RIGHT_TURN:
if (fabs(prev_robot_pose_ - robot_pose_) >= escape_range) {
turtlebot3_state_num = GET_TB3_DIRECTION;
} else {
update_cmd_vel(0.0, -1 * ANGULAR_VELOCITY);
}
break;
case TB3_LEFT_TURN:
if (fabs(prev_robot_pose_ - robot_pose_) >= escape_range) {
turtlebot3_state_num = GET_TB3_DIRECTION;
} else {
update_cmd_vel(0.0, ANGULAR_VELOCITY);
}
break;
default:
turtlebot3_state_num = GET_TB3_DIRECTION;
break;
}
}
/*******************************************************************************
** Main
*******************************************************************************/
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<Turtlebot3Drive>());
rclcpp::shutdown();
return 0;
}
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
- 36.
- 37.
- 38.
- 39.
- 40.
- 41.
- 42.
- 43.
- 44.
- 45.
- 46.
- 47.
- 48.
- 49.
- 50.
- 51.
- 52.
- 53.
- 54.
- 55.
- 56.
- 57.
- 58.
- 59.
- 60.
- 61.
- 62.
- 63.
- 64.
- 65.
- 66.
- 67.
- 68.
- 69.
- 70.
- 71.
- 72.
- 73.
- 74.
- 75.
- 76.
- 77.
- 78.
- 79.
- 80.
- 81.
- 82.
- 83.
- 84.
- 85.
- 86.
- 87.
- 88.
- 89.
- 90.
- 91.
- 92.
- 93.
- 94.
- 95.
- 96.
- 97.
- 98.
- 99.
- 100.
- 101.
- 102.
- 103.
- 104.
- 105.
- 106.
- 107.
- 108.
- 109.
- 110.
- 111.
- 112.
- 113.
- 114.
- 115.
- 116.
- 117.
- 118.
- 119.
- 120.
- 121.
- 122.
- 123.
- 124.
- 125.
- 126.
- 127.
- 128.
- 129.
- 130.
- 131.
- 132.
- 133.
- 134.
- 135.
- 136.
- 137.
- 138.
- 139.
- 140.
- 141.
- 142.
- 143.
- 144.
- 145.
- 146.
- 147.
- 148.
- 149.
- 150.
- 151.
- 152.
- 153.
- 154.
- 155.
- 156.
- 157.
- 158.
This involves some key reading sensors ,0 degree ,30 degree ,-30 Distance in degrees .
Then there are some initial values to look at the header file :
#ifndef TURTLEBOT3_GAZEBO__TURTLEBOT3_DRIVE_HPP_
#define TURTLEBOT3_GAZEBO__TURTLEBOT3_DRIVE_HPP_
#include <geometry_msgs/msg/twist.hpp>
#include <nav_msgs/msg/odometry.hpp>
#include <rclcpp/rclcpp.hpp>
#include <sensor_msgs/msg/laser_scan.hpp>
#include <tf2/LinearMath/Matrix3x3.h>
#include <tf2/LinearMath/Quaternion.h>
#define DEG2RAD (M_PI / 180.0)
#define RAD2DEG (180.0 / M_PI)
#define CENTER 0
#define LEFT 1
#define RIGHT 2
#define LINEAR_VELOCITY 0.3
#define ANGULAR_VELOCITY 1.5
#define GET_TB3_DIRECTION 0
#define TB3_DRIVE_FORWARD 1
#define TB3_RIGHT_TURN 2
#define TB3_LEFT_TURN 3
class Turtlebot3Drive : public rclcpp::Node
{
public:
Turtlebot3Drive();
~Turtlebot3Drive();
private:
// ROS topic publishers
rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr cmd_vel_pub_;
// ROS topic subscribers
rclcpp::Subscription<sensor_msgs::msg::LaserScan>::SharedPtr scan_sub_;
rclcpp::Subscription<nav_msgs::msg::Odometry>::SharedPtr odom_sub_;
// Variables
double robot_pose_;
double prev_robot_pose_;
double scan_data_[3];
// ROS timer
rclcpp::TimerBase::SharedPtr update_timer_;
// Function prototypes
void update_callback();
void update_cmd_vel(double linear, double angular);
void scan_callback(const sensor_msgs::msg::LaserScan::SharedPtr msg);
void odom_callback(const nav_msgs::msg::Odometry::SharedPtr msg);
};
#endif // TURTLEBOT3_GAZEBO__TURTLEBOT3_DRIVE_HPP_
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
- 36.
- 37.
- 38.
- 39.
- 40.
- 41.
- 42.
- 43.
- 44.
- 45.
- 46.
- 47.
- 48.
- 49.
- 50.
- 51.
- 52.
- 53.
- 54.
This is a general and easy obstacle avoidance code , As long as it is a laser sensor, two wheel differential car is applicable .
边栏推荐
- MySQL REGEXP:正则表达式查询
- [FPGA tutorial case 9] design and implementation of clock manager based on vivado core
- 【海浪建模3】三维随机真实海浪建模以及海浪发电机建模matlab仿真
- node工程中package.json文件作用是什么?里面的^尖括号和~波浪号是什么意思?
- PHP Joseph Ring problem
- PHP 约瑟夫环问题
- Interesting practice of robot programming 14 robot 3D simulation (gazebo+turtlebot3)
- Common bit operation skills of C speech
- [wave modeling 1] theoretical analysis and MATLAB simulation of wave modeling
- Redis master-slave replication cluster and recovery ideas for abnormal data loss # yyds dry goods inventory #
猜你喜欢
ROS command line tool

Call Huawei order service to verify the purchase token interface and return connection reset
Arbitrum: two-dimensional cost
![Yyds dry goods inventory [Gan Di's one week summary: the most complete and detailed in the whole network]; detailed explanation of MySQL index data structure and index optimization; remember collectio](/img/e8/de158982788fc5bc42f842b07ff9a8.jpg)
Yyds dry goods inventory [Gan Di's one week summary: the most complete and detailed in the whole network]; detailed explanation of MySQL index data structure and index optimization; remember collectio

MySQL REGEXP:正则表达式查询
Expansion operator: the family is so separated
![[development of large e-commerce projects] performance pressure test - Optimization - impact of middleware on performance -40](/img/e4/0bdee782a65028b2bc87db85d48738.png)
[development of large e-commerce projects] performance pressure test - Optimization - impact of middleware on performance -40
![[CTF] AWDP summary (WEB)](/img/4c/574742666bd8461c6f9263fd6c5dbb.png)
[CTF] AWDP summary (WEB)
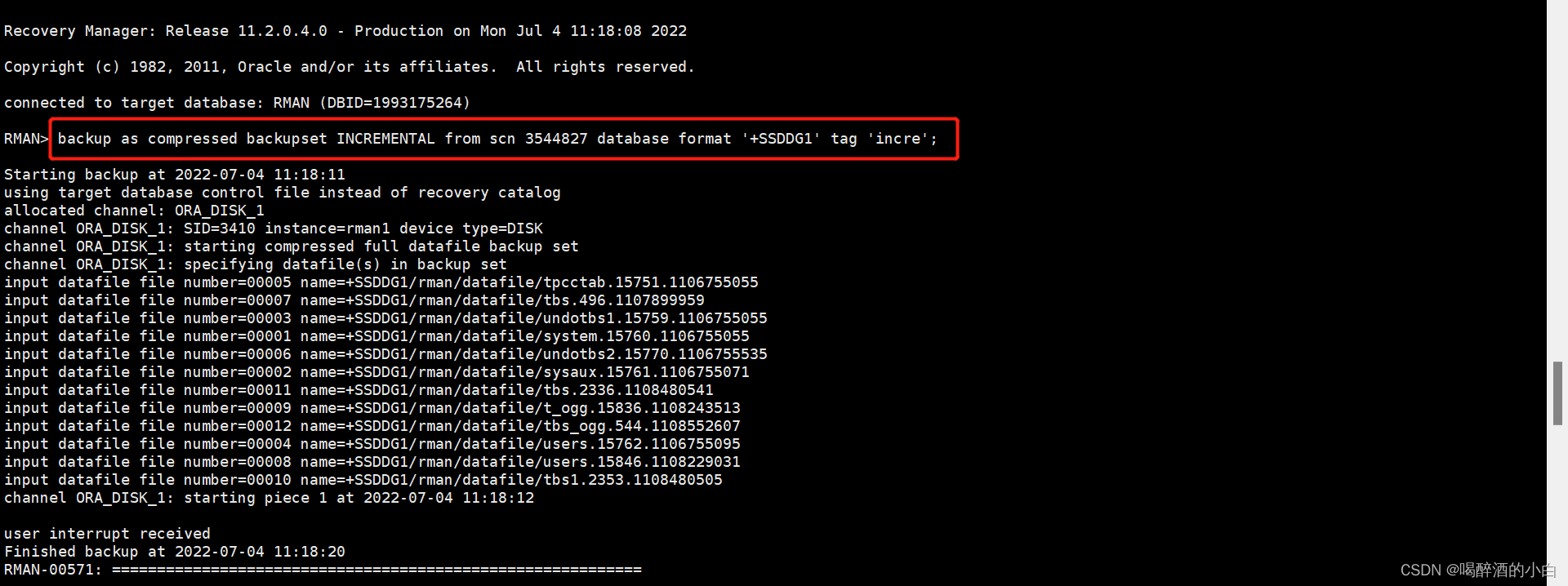
增量备份 ?db full
【CTF】AWDP总结(Web)
随机推荐
【海浪建模2】三维海浪建模以及海浪发电机建模matlab仿真
Wechat applet: new independent backstage Yuelao office one yuan dating blind box
【海浪建模1】海浪建模的理论分析和matlab仿真
Database postragesq peer authentication
FEG founder rox:smartdefi will be the benchmark of the entire decentralized financial market
Database postragesql client connection default
【FPGA教程案例10】基于Verilog的复数乘法器设计与实现
After reading the average code written by Microsoft God, I realized that I was still too young
Discrete mathematics: Main Normal Form (main disjunctive normal form, main conjunctive normal form)
Wechat applet: exclusive applet version of the whole network, independent wechat community contacts
Global and Chinese markets of emergency rescue vessels (errv) 2022-2028: Research Report on technology, participants, trends, market size and share
MySQL backup and recovery + experiment
[wave modeling 1] theoretical analysis and MATLAB simulation of wave modeling
What is the current situation and Prospect of the software testing industry in 2022?
es使用collapseBuilder去重和只返回某个字段
Armv8-a programming guide MMU (3)
Single step debugging of master data reading of SAP commerce cloud products
【LeetCode】88. Merge two ordered arrays
Expansion operator: the family is so separated
[development of large e-commerce projects] performance pressure test - Optimization - impact of middleware on performance -40