当前位置:网站首页>Hands on deep learning (IV) -- convolutional neural network CNN
Hands on deep learning (IV) -- convolutional neural network CNN
2022-07-07 07:45:00 【Long way to go 2021】
In the previous section, I learned the implementation of convolution layer and pooling layer of convolution neural network , Strike while the iron is hot and continue to learn the construction of modern Convolutional Neural Networks , Welcome friends to study and communicate together ~
In order to be able to respond ⽤softmax Regression and multi-layer perceptron , We ⾸ First, put each ⼤ Xiao Wei 28 × 28 28 \times 28 28×28 The image is flattened to ⼀ individual 784 Fixation of dimension ⻓ Degree ⼀ Dimension vector , then ⽤ The whole connection layer is for it ⾏ Handle . And now , We have mastered the treatment of convolution ⽅ Law , You can preserve the spatial structure in the image . meanwhile ,⽤ Convolution layer replaces another of the full connection layer ⼀ One advantage is that : The model is more concise 、 Fewer parameters required .
There are many detailed introductions and advantages and disadvantages of these networks on the Internet , Here we just introduce the composition and implementation of various convolution Networks . These models include :
- LeNet. Convolutional neural network, which was first released ⽹ Collaterals ⼀;
- AlexNet. The first ⼀ It's in ⼤ Beat the traditional computer vision model in the scale vision competition ⼤ Type nerve ⽹ Collateral ;
- send ⽤ Repeated block ⽹ Collateral (VGG). benefit ⽤ Many repetitive nerves ⽹ Collaterals ;
- ⽹ Collateral ⽹ Collateral (NiN). Repeat make ⽤ Composed of convolution and 1 × 1 1\times 1 1×1 Convolution layer (⽤ To replace the full connection layer ) To build deep ⽹ Collateral ;
- Contain and ⾏ Connected ⽹ Collateral (GoogLeNet). send ⽤ and ⾏ Connected ⽹ Collateral , Through different windows ⼤ Small convolution layers and the most ⼤ Convergence layer and ⾏ Extract information ;
- residual ⽹ Collateral (ResNet). Build cross layer data channels through residual blocks , It is the most popular in computer vision ⾏ The architecture of ;
- Dense connections ⽹ Collateral (DenseNet). Calculating the cost is very ⾼, But it has brought us better results .
1 LeNet
1.1 Model structures,
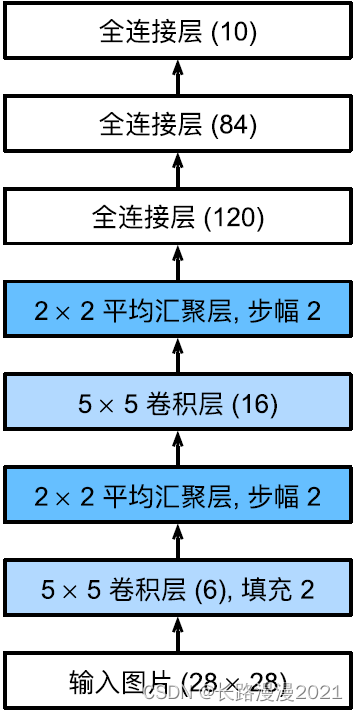
LeNet(LeNet-5) It consists of two parts :(1) Convolutional encoder : It consists of two convolutions ;(2) Full connection layer dense blocks : It consists of three fully connected layers . The architecture is shown in the following figure :
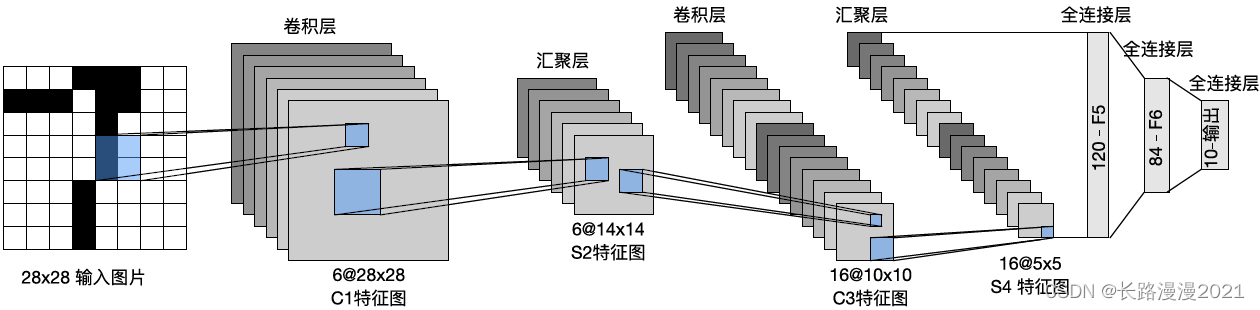
The basic unit in each convolution block is ⼀ Convolution layers 、⼀ individual sigmoid Activation function and average convergence layer . Please note that , although ReLU And the most ⼤ The convergence layer is more effective , But they are 20 century 90 The age has not yet appeared . Each convolution layer makes ⽤ 5 × 5 5\times 5 5×5 Convolution kernels and ⼀ individual sigmoid Activation function . These layers will lose ⼊ Map to multiple ⼆ Dimension feature output , Usually increase the number of channels at the same time . The first ⼀ The convolution layer has 6 Output channels , And the first ⼆ There are three convolution layers 16 Output channels . Every 2 × 2 2\times 2 2×2 Pooling operation ( step 2) The dimension is reduced by spatial down sampling 4 times . The output shape of convolution is determined by batch ⼤ Small 、 The channel number 、⾼ degree 、 Width determination .
In order to pass the output of convolution block to dense block , We have to flatten each sample in a small batch . in ⾔ And , Lose this four dimension ⼊ Convert to what the full connection layer expects ⼆ Maintenance and transportation ⼊. this ⾥ Of ⼆ Dimension table ⽰ Of the ⼀ Dimension index samples in small batches , The first ⼆ Four dimensions give the average of each sample ⾯ Vector table ⽰.LeNet The dense block of has three full connection layers , There were 120、84 and 10 Outputs . Because we are still holding ⾏ classification , So the output layer 10 The dimension corresponds to the number of final output results .LeNet You only need to instantiate one Sequential Block and connect the required layers together .
import torch
from torch import nn
from d2l import torch as d2l
from torchvision import transforms
from torch.utils.data import DataLoader
from mnist_dataset import FashionMnistDataset # Custom dataset import
# Model structures,
LeNet = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5, padding=2), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Flatten(),
nn.Linear(16 * 5 * 5, 120), nn.Sigmoid(),
nn.Linear(120, 84), nn.Sigmoid(),
nn.Linear(84, 10))
The original model is made here ⼀ A little change , Remove the last ⼀ Layer of ⾼ S activation . besides , This ⽹ Collaterals with the original LeNet-5⼀ Cause .
Next ⾯, We will ⼀ individual ⼤ Xiao Wei 28 × 28 28\times 28 28×28 Single channel (⿊⽩) The image passes through LeNet. Through every ⼀ The shape of the layer printout , We can check the model , To ensure that it operates as we expect ⼀ Cause .
X = torch.rand(size=(1, 1, 28, 28), dtype=torch.float32)
for layer in LeNet:
X = layer(X)
print(layer.__class__.__name__, 'output shape: \t', X.shape)
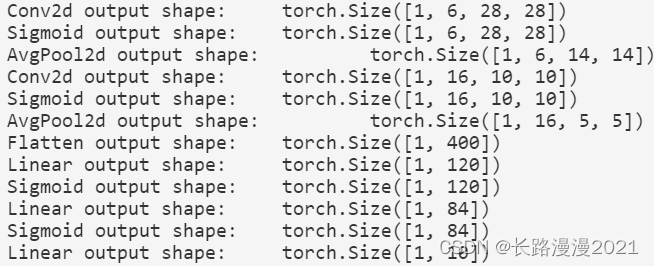
reminder , In the whole convolution block , And upper ⼀ Stratigraphy ⽐, Every time ⼀ Layer characteristic ⾼ The degree and width are reduced . The first ⼀ A convolution layer makes ⽤2 Pixel fill , To compensate 5 × 5 5 \times 5 5×5 The feature reduction caused by convolution kernel . contrary , The first ⼆ The convolution layer is not filled , therefore ⾼ The degree and width are reduced 4 Pixel . As the stack rises , The number of channels is from ⼊ At the time of the 1 individual , Add to ⼀ After a convolution 6 individual , And then to the ⼆ After a convolution 16 individual . meanwhile , Of each convergence layer ⾼ Both degree and width are halved . Last , Each fully connected layer reduces the dimension , Final output ⼀ Output whose dimension matches the number of result classifications .
1.2 model training
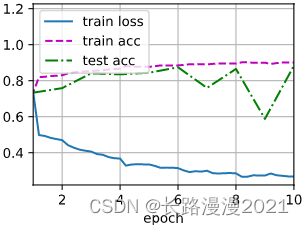
Let's take a look at LeNet stay Fashion-MNIST Performance on dataset .
Because of the domestic network , Downloading datasets is particularly slow , So use the downloaded local data set , Download datasets online , have access to d2l In the bag load_data_fashion_mnist, as follows :
batch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size=batch_size)
The custom data import is as follows :
# -*- coding: utf-8 -*-
""" Function Name:mnist_dataset.py Version:0.1 Description: Realization mnsit and Fashion-mnist Import of two datasets Author:CarpeDiem """
import gzip
import os
import numpy as np
from torch.utils.data import Dataset
class FashionMnistDataset(Dataset):
""" Reading data 、 Initialization data """
def __init__(self, folder, data_name, label_name, transform=None):
(train_set, train_labels) = load_data(folder, data_name, label_name)
self.train_set = train_set
self.train_labels = train_labels
self.transform = transform
def __getitem__(self, index):
img, target = self.train_set[index], int(self.train_labels[index])
if self.transform is not None:
img = self.transform(img)
return img, target
def __len__(self):
return len(self.train_set)
def load_data(data_folder, data_name, label_name):
with gzip.open(os.path.join(data_folder, label_name), 'rb') as labpath:
y_train = np.frombuffer(labpath.read(), np.uint8, offset=8)
with gzip.open(os.path.join(data_folder, data_name), 'rb') as imgpath:
x_train = np.frombuffer(imgpath.read(), np.uint8,
offset=16).reshape(len(y_train), 28, 28)
return (x_train, y_train)
# Dataset import
batch_size = 256
transform = transforms.Compose([transforms.ToTensor()])
train_dataset = FashionMnistDataset('../dataset/fashion-mnist', 'train-images-idx3-ubyte.gz', 'train-labels-idx1-ubyte.gz', transform=transform)
train_loader = DataLoader(train_dataset, shuffle=True, batch_size=batch_size)
test_dataset = FashionMnistDataset('../dataset/fashion-mnist', 't10k-images-idx3-ubyte.gz', 't10k-labels-idx1-ubyte.gz', transform=transform)
test_loader = DataLoader(test_dataset, shuffle=False, batch_size=batch_size)
Although convolution nerve ⽹ The parameters of the complex are less , But with the depth of the multi-layer perceptron ⽐, Their computational costs are still very ⾼, Because each parameter is involved in more multiplication . This is where ⽤GPU Speed up training . Rewrite here evaluate_accuracy function .
def evaluate_accuracy_gpu(net, data_loader, device=None):
""" Use GPU Calculate the accuracy of the model on the dataset """
if isinstance(net, nn.Module):
net.eval() # Set to evaluation mode
if not device:
device = next(iter(net.parameters())).device
# The number of correct predictions , Total forecast quantity
metric = d2l.Accumulator(2)
with torch.no_grad():
for X, y in data_loader:
if isinstance(X, list):
X = [x.to(device) for x in X]
else:
X = X.to(device)
y = y.to(device)
metric.add(d2l.accuracy(net(X), y), y.numel())
return metric[0] / metric[1]
In into ⾏ Before forward and backward propagation , We need to put every ⼀ Small batch data is moved to our designated equipment ( for example GPU) On . With full connection layer ⼀ sample , send ⽤ Cross entropy loss function and small batch random gradient descent , The training model is as follows .
def train_ch6(net, train_loader, test_loader, num_epoches, lr, device):
""" use GPU Training models """
def init_weights(m):
if isinstance(m, nn.Linear) or isinstance(m, nn.Conv2d):
nn.init.xavier_normal_(m.weight)
net.apply(init_weights)
print('training on', device)
net.to(device)
optimizer = torch.optim.SGD(net.parameters(), lr=lr)
criterion = nn.CrossEntropyLoss()
animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epoches], legend=['train loss', 'train acc', 'test acc'])
timer, num_batches = d2l.Timer(), len(train_loader)
for epoch in range(num_epoches):
# The sum of training losses , The sum of training accuracy , Number of examples
metric = d2l.Accumulator(3)
net.train()
for iteration, (X, y) in enumerate(train_loader):
timer.start()
optimizer.zero_grad()
X, y = X.to(device), y.to(device)
y_hat = net(X)
loss = criterion(y_hat, y)
loss.backward()
optimizer.step()
with torch.no_grad():
metric.add(loss * X.shape[0], d2l.accuracy(y_hat, y), X.shape[0])
timer.stop()
train_loss = metric[0] / metric[2]
train_acc = metric[1] / metric[2]
if (iteration + 1) % (num_batches // 5) == 0 or iteration == num_batches - 1: # Every time num_batches//5 Calculate the loss and training accuracy every time
animator.add(epoch + (iteration + 1) / num_batches, (train_loss, train_acc, None))
test_acc = evaluate_accuracy_gpu(net, test_loader) # After a round of training, calculate the accuracy of prediction
animator.add(epoch+1, (None, None, test_acc))
print(f'loss {
train_loss:.3f}, train acc {
train_acc:.3f}, test acc {
test_acc:.3f}')
print(f'{
metric[2] * num_epoches / timer.sum():.1f} examples/sec, on {
str(device)}')
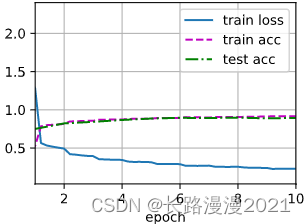
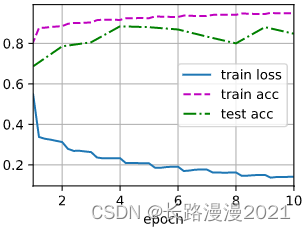
Next , Training and evaluation LeNet-5 Model .
lr, num_epochs = 0.9, 10
train_ch6(LeNet, train_loader, test_loader,num_epochs, lr, d2l.try_gpu())
# loss 0.465, train acc 0.826, test acc 0.824
# 84969.9 examples/sec, on cuda:0

2 AlexNet
2012 year ,AlexNet Born in the sky . it ⾸ This proves that the learned characteristics can surpass ⼿⼯ Design features . it ⼀ It breaks the current situation of computer vision research .AlexNet send ⽤ 了 8 Layer convolution nerve ⽹ Collateral , And it's very ⼤ Has won the advantage of 2012 year ImageNet Image recognition challenge .
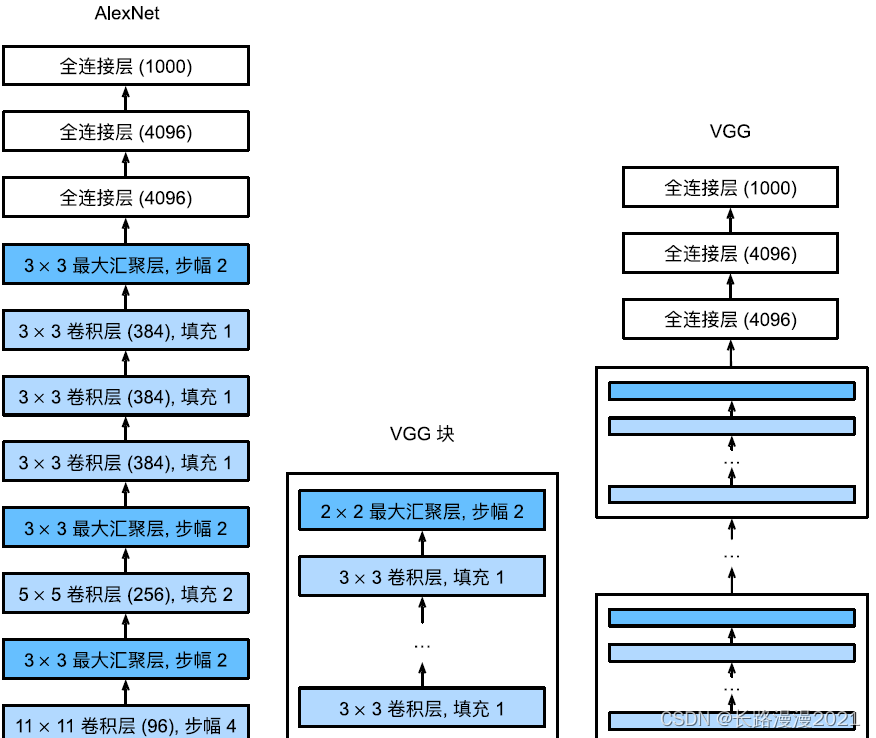
AlexNet and LeNet The architecture of ⾮ Often similar , As shown below ⽰. Be careful , this ⾥ Provides ⼀ A slightly simplified version AlexNet, It eliminates the need for two small GPU Design features of simultaneous operation .
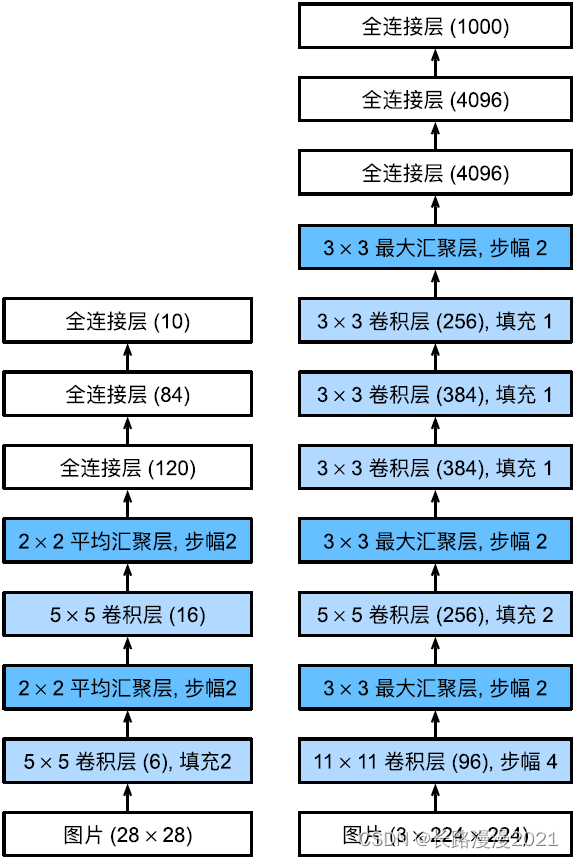
AlexNet and LeNet Design concept of ⾮ Often similar , But there are also significant differences .⾸ First ,AlexNet⽐ Relatively small LeNet5 Much deeper .AlexNet from ⼋ layers : Five convolutions 、 Two fully connected hidden layers and ⼀ All connected output layers . secondly ,AlexNet send ⽤ReLU instead of sigmoid As its activation function . Next ⾯, Let's go deep ⼊ Research AlexNet The details of the .
2.1 Model design
stay AlexNet Of the ⼀ layer , The shape of the convolution window is 11 × 11 11\times 11 11×11. because ImageNet in ⼤ The width and width of most images ⾼⽐MNIST More images 10 More than times , therefore , need ⼀ A change ⼤ Convolution window to capture ⽬ mark . The first ⼆ The convolution window shape in the layer is reduced to 5 × 5 5\times 5 5×5, And then there was 3 × 3 3\times 3 3×3. Besides , In the ⼀ layer 、 The first ⼆ Layer and the fifth layer after the convolution layer , Add ⼊ The window shape is 3 × 3 3\times 3 3×3、 The stride is 2 The most ⼤ Convergence layer . and ,AlexNet Number of convolution channels ⽬ yes LeNet Of 10 times .
In the end ⼀ There are two fully connected layers behind the convolution layer , There were 4096 Outputs . These two giants ⼤ The full connection layer of has nearly 1GB Model parameters of . Because of the early GPU Limited memory , The original AlexNet Mining ⽤ A dual data flow design , Make each GPU Only responsible for storing and calculating models ⼀ Semiparametric . Fortunately, , Now? GPU Video memory is relatively abundant , So we seldom need to cross GPU Decompose the model ( therefore , our AlexNet The model is here ⽅⾯ And primitive theory ⽂ not quite the same ).
AlexNet take sigmoid Change the activation function to a simpler ReLU Activation function .⼀⽅⾯,ReLU The calculation of the activation function is simpler , It doesn't need to be like sigmoid The complex exponentiation of the activation function . another ⼀⽅⾯, When to make ⽤ Different parameter initialization ⽅ Legal time ,ReLU The activation function makes the training model easier . When sigmoid Activate the output of the function ⾮ Often close to 0 or 1 when , The gradient of these areas ⼏ Hu Wei 0, So back propagation ⽆ The law continues to be updated ⼀ Some model parameters . contrary ,ReLU The gradient of the activation function in the positive interval is always 1. therefore , If the model parameters are not initialized correctly ,sigmoid The function may get... In a positive interval ⼏ Hu Wei 0 Gradient of , So that the model ⽆ Get effective training .
AlexNet adopt dropout Control the model complexity of the whole connection layer , and LeNet Only make ⽤ Weight attenuation .
Alexnet = nn.Sequential(
# this ⾥ send ⽤⼀ individual 11*11 The change of ⼤ window ⼝ To snap objects .
# The stride is 4, To reduce the output ⾼ Degree and width .
# Number of output channels ⽬ far ⼤ On LeNet
nn.Conv2d(1, 96, kernel_size=11, stride=4), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
# reduce ⼩ Convolution window ⼝, send ⽤ Fill in with 2 To make you lose ⼊ With the output ⾼ And width ⼀ Cause , And increase ⼤ Number of output channels
nn.Conv2d(96, 256, kernel_size=5, padding=2), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
# send ⽤ Three consecutive convolution layers and ⼩ Convolution window of ⼝.
# Except for the last convolution layer , The number of output channels goes into ⼀ Step increase .
# After the first two convolutions , The convergence layer is not ⽤ In reducing losses ⼊ Of ⾼ Degree and width
nn.Conv2d(256, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 256, kernel_size=3, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Flatten(),
# this ⾥, The number of outputs of the full connection layer is LeNet Good in ⼏ times . send ⽤dropout Layer to reduce over fitting
nn.Linear(6400, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
nn.Linear(4096, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
# Finally, the output layer . Because of this ⾥ send ⽤Fashion-MNIST, therefore ⽤ The number of categories is 10,⽽⾮ On ⽂ Medium 1000
nn.Linear(4096, 10))
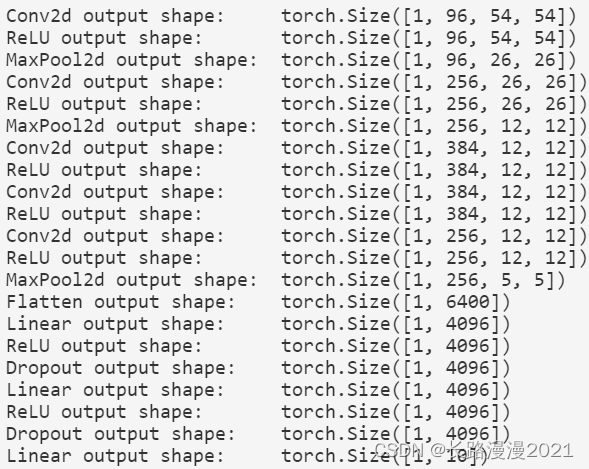
structure ⼀ individual ⾼ Degree and width are 224 Single channel data of , To observe every ⼀ The shape of the layer output .
X = torch.randn(1, 1, 224, 224)
for layer in Alexnet:
X = layer(X)
print(layer.__class__.__name__, 'output shape:\t', X.shape)
2.2 Reading data sets
Although Ben ⽂ in AlexNet Is in ImageNet progresses ⾏ Trained , But we're here ⾥ send ⽤ Yes. Fashion-MNIST Data sets . Because even in modern times GPU On , Training ImageNet Model , At the same time, it may take hours or days to converge . take AlexNet Directly respond to ⽤ On Fashion-MNIST Of ⼀ The problem is ,Fashion-MNIST The resolution of the image ( 28 × 28 28\times28 28×28 Pixels ) lower than ImageNet Images . To solve this problem , We add them to 224 × 224 224\times224 224×224( Generally speaking, this is not ⼀ A wise approach , But we're here ⾥ This is done in order to effectively make ⽤AlexNet framework ).
# Dataset import
batch_size = 256
resize = 224
transform = transforms.Compose([transforms.ToTensor(), transforms.Resize(resize)])
train_dataset = FashionMnistDataset('../dataset/fashion-mnist', 'train-images-idx3-ubyte.gz', 'train-labels-idx1-ubyte.gz', transform=transform)
train_loader = DataLoader(train_dataset, shuffle=True, batch_size=batch_size)
test_dataset = FashionMnistDataset('../dataset/fashion-mnist', 't10k-images-idx3-ubyte.gz', 't10k-labels-idx1-ubyte.gz', transform=transform)
test_loader = DataLoader(test_dataset, shuffle=False, batch_size=batch_size)
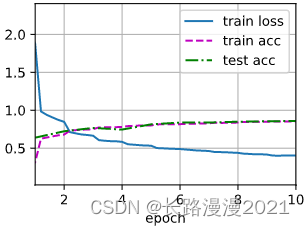
2.3 Training AlexNet
With the last section of LeNet phase ⽐, this ⾥ The main change is to make ⽤ Lower learning rate training , This is because ⽹ The collaterals are deeper and more ⼴、 The image resolution is higher ⾼, Train convolution nerve ⽹ Collaterals are more expensive .
lr, num_epochs = 0.01, 10
d2l.train_ch6(Alexnet, train_loader, test_loader, num_epochs, lr, d2l.try_gpu())
# loss 0.402, train acc 0.853, test acc 0.859
# 3433.1 examples/sec on cuda:0
3 VGG
3.1 VGG block
Classical convolutional nerve ⽹ The basic component of collaterals is lower ⾯ This sequence of :1. Convolution layer with filling to maintain resolution ;1. ⾮ Linear activation function , Such as ReLU;1. Convergence layer , Like the most ⼤ Convergence layer .
and ⼀ individual VGG Block is similar to it , from ⼀ Series convolution layer composition , after ⾯ Plus ⽤ The most..., sampled in space ⼤ Convergence layer . In the initial VGG On ⽂Simonyan & Zisserman, 2014 in , The author made ⽤ With 3 × 3 3 \times 3 3×3 Convolution kernel 、 Fill in with 1( keep ⾼ Degree and width ) The convolution of layer , And with 2 × 2 2 \times 2 2×2 Convergence window 、 The stride is 2( The resolution after each block is halved ) The most ⼤ Convergence layer . Under ⾯ In the code of , Defined ⼀ One is called vgg_block The function of ⼀ individual VGG block . This function has three arguments , Corresponding to the number of convolution layers num_convs、 transport ⼊ The number of channels in_channels And the number of output channels out_channels.
def vgg_block(num_convs, in_channels, out_channels):
layers = []
for _ in range(num_convs):
layers.append(nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1))
layers.append(nn.ReLU())
in_channels = out_channels
layers.append(nn.MaxPool2d(kernel_size=2, stride=2))
return nn.Sequential(*layers)
3.2 VGG The Internet
And AlexNet、LeNet⼀ sample ,VGG⽹ Collaterals can be divided into two parts : The first ⼀ The part is mainly composed of convolution layer and convergence layer , The first ⼆ Part consists of the whole connection layer . The network structure is shown in the figure below .
VGG nerve ⽹ The network connects the ⼏ individual VGG block ( stay vgg_block Function ). There are super parametric variables conv_arch. This variable specifies each VGG block ⾥ Number of convolution layers and output channels . The fully connected module is connected with AlexNet The same in .
original VGG⽹ Collaterals 5 Convolution blocks , The first two blocks each have ⼀ Convolution layers , The last three blocks each contain two convolution layers . The first ⼀ There are two modules 64 Output channels , Each subsequent module doubles the number of output channels , Until the number reaches 512. Because of the ⽹ Collateral envoy ⽤8 Convolutions and 3 All connection layers , So it's often called VGG-11. Next ⾯ The code of VGG-11. It can be done by conv_arch Hold on to ⾏for Loop to simply implement .
def vgg(conv_arch):
conv_blks = []
in_channels = 1
for (num_convs, out_channels) in conv_arch:
conv_blks.append(vgg_block(num_convs, in_channels, out_channels))
in_channels = out_channels
return nn.Sequential(
*conv_blks, nn.Flatten(),
nn.Linear(out_channels * 7 * 7, 4096), nn.ReLU(), nn.Dropout(0.5),
nn.Linear(4096, 4096), nn.ReLU(), nn.Dropout(0.5),
nn.Linear(4096, 10))
conv_arch = ((1, 64), (1, 128), (2, 256), (2, 512), (2, 512))
net = vgg(conv_arch)
Next , structure ⼀ individual ⾼ Degree and width are 224 Single channel data sample , To observe the shape of the output of each layer .
X = torch.rand(size=(1, 1, 224, 224))
for blk in net:
X = blk(X)
print(blk.__class__.__name__, 'output shape:\t', X.shape)
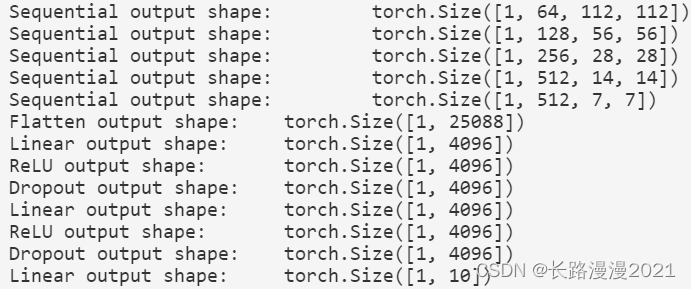
You can find , In each block ⾼ Half the degree and width , Final ⾼ Degree and width are 7. Finally, flatten the table ⽰, send ⼊ Full connection layer processing .
3.3 Training models
because VGG-11⽐AlexNet The amount of calculation is more ⼤, So we built ⼀ Less channels ⽹ Collateral ,⾜ enough ⽤ In training Fashion-MNIST Data sets .
ratio = 4
small_conv_arch = [(pair[0], pair[1] // ratio) for pair in conv_arch]
net = vgg(small_conv_arch)
The model training process is the same as that in the previous section AlexNet similar .
lr, num_epochs = 0.05, 10
d2l.train_ch6(net, train_loader, test_loader, num_epochs, lr, d2l.try_gpu())
# loss 0.228, train acc 0.917, test acc 0.894
# 1851.7 examples/sec on cuda:0
4 NiN
LeNet、AlexNet and VGG There are ⼀ Common design patterns : adopt ⼀ A series of convolution layers and convergence layers are used to extract spatial structure features ; Then, through the characterization of the features of the full connection layer ⾏ Handle .AlexNet and VGG Yes LeNet The improvement of mainly lies in how to expand ⼤ And deepen these two modules . perhaps , It is conceivable to make ⽤ Fully connected layer . However , If so ⽤ A full connection layer , May completely abandon the spatial structure of representation .⽹ Collateral ⽹ Collateral (NiN) Provides ⼀ individual ⾮ Often simple solution ⽅ case : Make ⽤ Multilayer perceptron .
4.1 NiN block
NiN The idea is at each pixel position ( For each ⾼ Degree and width ) Should be ⽤⼀ All connection layers . If we connect weights to each spatial location , We can think of it as 1 × 1 1 \times 1 1×1 Convolution layer , Or as unique in each pixel position ⽴ do ⽤ The full connection layer of . From the other side ⼀ individual ⻆ To see , That is, each pixel in the spatial dimension is regarded as a single sample , Consider channel dimensions as different characteristics (feature).
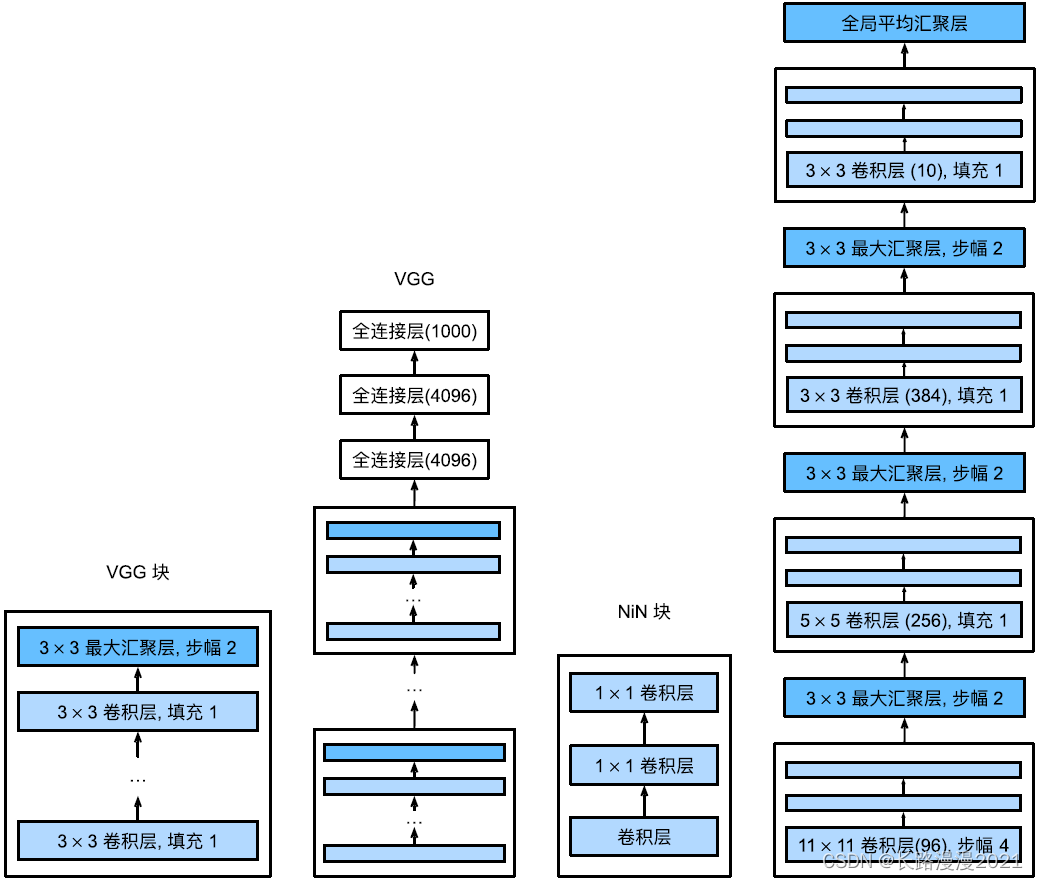
The following figure illustrates VGG and NiN And the main architectural differences between their blocks .NiN Block with ⼀ Start with an ordinary convolution , after ⾯ Are the two 1 × 1 1 \times 1 1×1 The convolution of layer . these two items. 1 × 1 1 \times 1 1×1 The convolution layer acts as a band ReLU Activate the pixel by pixel full connection layer of the function . The first ⼀ The convolution window shape of a layer is usually determined by ⽤⼾ Set up . The subsequent convolution window shape is fixed to 1 × 1 1 \times 1 1×1.
def nin_block(in_channels, out_channels, kernel_size, strides, padding):
return nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size, strides, padding),
nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1), nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1), nn.ReLU())
4.2 NiN Model
NiN send ⽤ The window shape is 11 × 11 11\times11 11×11、 5 × 5 5\times5 5×5 and 3 × 3 3\times3 3×3 The convolution of layer , The number of output channels is the same as AlexNet The same in . Every NiN There is... Behind the block ⼀ The most ⼤ Convergence layer , The shape of the convergence window is 3 × 3 3 \times 3 3×3, The stride is 2.
NiN and AlexNet Between ⼀ One notable difference is NiN The full connection layer has been completely eliminated . contrary ,NiN send ⽤⼀ individual NiN block , The number of output channels is equal to the number of label categories . At last ⼀ Global average convergence layer (global average pooling layer),⽣ become ⼀ Multiple logic vectors (logits).NiN The design of the ⼀ One advantage is , It significantly reduces the number of parameters required by the model . However , In practice , This design sometimes increases the time of training the model .
net = nn.Sequential(
nin_block(1, 96, kernel_size=11, strides=4, padding=0),
nn.MaxPool2d(3, stride=2),
nin_block(96, 256, kernel_size=5, strides=1, padding=2),
nn.MaxPool2d(3, stride=2),
nin_block(256, 384, kernel_size=3, strides=1, padding=1),
nn.MaxPool2d(3, stride=2),
nn.Dropout(0.5),
nin_block(384, 10, kernel_size=3, strides=1, padding=1),
nn.AdaptiveAvgPool2d((1, 1)),
# Convert the four-dimensional output to ⼆ Output of dimension , Its shape is ( Batch ⼤⼩,10)
nn.Flatten())
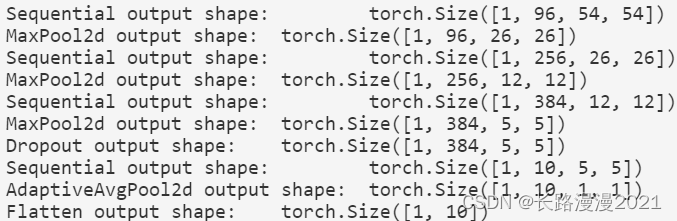
establish ⼀ Data samples to see the output shape of each block .
X = torch.rand(size=(1, 1, 224, 224))
for layer in net:
X = layer(X)
print(layer.__class__.__name__, 'output shape:\t', X.shape)
4.3 Training models
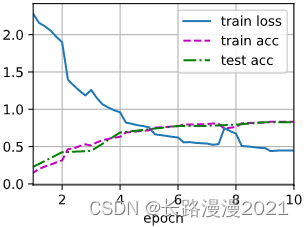
And before ⼀ sample , send ⽤Fashion-MNIST To train the model . Training NiN And training AlexNet、VGG Time similarity .
lr, num_epochs = 0.1, 10
d2l.train_ch6(net, train_loader, test_loader, num_epochs, lr, d2l.try_gpu())
# loss 0.448, train acc 0.833, test acc 0.827
# 2613.3 examples/sec on cuda:0
5 GoogLeNet
stay GoogLeNet in , The basic convolution block is called Inception block (Inception block). It's probably named after the movie 《 Inception 》(Inception), Because in the movie ⼀ Sentence “ We need to go deeper ”(“We need to go deeper”).
5.1 Inception block
As shown in the figure below ,Inception The block consists of four and ⾏ Path composition . The first three paths make ⽤ window ⼤ Xiao Wei 1 × 1 1\times1 1×1、 3 × 3 3\times3 3×3 and 5 × 5 5\times5 5×5 The convolution of layer , From different spaces ⼤ Extract information from small . The two paths in the middle are losing ⼊ Hold on to ⾏ 1 × 1 1 \times 1 1×1 Convolution , To reduce the number of channels , So as to reduce the complexity of the model . The fourth path makes ⽤ 3 × 3 3 \times 3 3×3 most ⼤ Convergence layer , Then make ⽤ 1 × 1 1 \times 1 1×1 Convolution layer to change the number of channels . All four paths make ⽤ Fill properly to make it lose ⼊ With the output ⾼ And width ⼀ Cause , Finally, we link the output of each line in the channel dimension , And constitute Inception Block output . stay Inception In block , Usually, the super parameter to be adjusted is the number of output channels per layer .
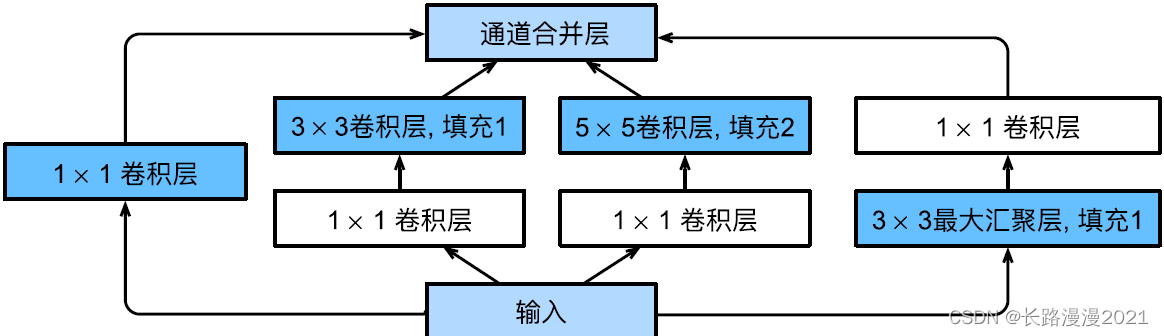
from torch.nn import functional as F
class Inception(nn.Module):
# c1--c4 Is the number of output channels per path
def __init__(self, in_channels, c1, c2, c3, c4, **kwargs):
super(Inception, self).__init__(**kwargs)
# line 1, single 1×1 Convolution layer
self.p1_1 = nn.Conv2d(in_channels, c1, kernel_size=1)
# line 2,1x1 Convolution layer followed by 3x3 Convolution layer
self.p2_1 = nn.Conv2d(in_channels, c2[0], kernel_size=1)
self.p2_2 = nn.Conv2d(c2[0], c2[1], kernel_size=3, padding=1)
# line 3,1x1 Convolution layer followed by 5x5 Convolution layer
self.p3_1 = nn.Conv2d(in_channels, c3[0], kernel_size=1)
self.p3_2 = nn.Conv2d(c3[0], c3[1], kernel_size=5, padding=2)
# line 4,3x3 most ⼤ The convergence layer is followed by 1x1 Convolution layer
self.p4_1 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
self.p4_2 = nn.Conv2d(in_channels, c4, kernel_size=1)
def forward(self, x):
p1 = F.relu(self.p1_1(x))
p2 = F.relu(self.p2_2(F.relu(self.p2_1(x))))
p3 = F.relu(self.p3_2(F.relu(self.p3_1(x))))
p4 = F.relu(self.p4_2(self.p4_1(x)))
# Link the output in the channel dimension
return torch.cat((p1, p2, p3, p4), dim=1)
So why GoogLeNet This ⽹ Collaterals are so effective ?⾸ Let's think about it first ⼀ Lower filter (filter) The combination of , They can ⽤ Various filter rulers ⼨ Explore images , It means different ⼤ Small filters can effectively identify different ranges of image details . meanwhile , We can assign different numbers of parameters to different filters .
5.2 GoogLeNet Model
GoogLeNet⼀ Make... Together ⽤9 individual Inception Stack of blocks and global average convergence layer ⽣ Become its estimated value .Inception The most ⼤ The aggregation layer can reduce the dimension . The first ⼀ Modules are similar to AlexNet and LeNet,Inception Combination of blocks from VGG Inherit , The global average convergence layer avoids making ⽤ Fully connected layer . The network structure is shown in the figure below .

By ⼀ Realization GoogLeNet Each module of . The first ⼀ Two modules make ⽤64 Channels 、 7 × 7 7 \times 7 7×7 Convolution layer .
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
The first ⼆ Two modules make ⽤ Two layers of convolution : The first ⼀ A convolution layer is 64 Channels 、 1 × 1 1 \times 1 1×1 Convolution layer ; The first ⼆ A convolution layer makes ⽤ Tripled the number of channels 3 × 3 3 \times 3 3×3 Convolution layer . This corresponds to Inception The... In the block ⼆ Paths .
b2 = nn.Sequential(nn.Conv2d(64, 64, kernel_size=1),
nn.ReLU(),
nn.Conv2d(64, 192, kernel_size=3, padding=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
The third module connects two complete modules in series Inception block . The first ⼀ individual Inception The number of output channels of the block is 64 + 128 + 32 + 32 = 256, Number of output channels between the four paths ⽐ by 64 : 128 : 32 : 32 = 2 : 4 : 1 : 1. The first ⼆ The first and third paths ⾸ Lose first ⼊ The number of channels is reduced to 96/192 = 1/2 and 16/192 = 1/12, Then connect the second ⼆ Convolution layers . The first ⼆ individual Inception Increase the number of output blocks to 128 + 192 + 96 + 64 = 480, Number of output channels between the four paths ⽐ by 128 : 192 : 96 : 64 = 4 : 6 : 3 : 2. The first ⼆ And the third path ⾸ Lose first ⼊ The number of channels is reduced to 128/256 = 1/2 and 32/256 = 1/8.
b3 = nn.Sequential(Inception(192, 64, (96, 128), (16, 32), 32),
Inception(256, 128, (128, 192), (32, 96), 64),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
The fourth module is more complex , It's connected in series 5 individual Inception block , The number of output channels is 192+208+48+64 = 512、160+224+64 + 64 = 512、128 + 256 + 64 + 64 = 512、112 + 288 + 64 + 64 = 528 and 256 + 320 + 128 + 128 = 832. The channel number allocation of these paths is similar to that in the third module ,⾸ First, including 3×3 In the convolution layer ⼆ The maximum number of output channels per path , Secondly, it only contains 1×1 In the convolution layer ⼀ Paths , And then there's 5×5 The third path of convolution layer and containing 3×3 most ⼤ The fourth path of the convergence layer . Among them the first ⼆、 The third path will first press ⽐ For example, reduce the number of channels . these ⽐ For example, in each Inception The blocks are all slightly different .
b4 = nn.Sequential(Inception(480, 192, (96, 208), (16, 48), 64),
Inception(512, 160, (112, 224), (24, 64), 64),
Inception(512, 128, (128, 256), (24, 64), 64),
Inception(512, 112, (144, 288), (32, 64), 64),
Inception(528, 256, (160, 320), (32, 128), 128),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
The fifth module contains output channels with a number of 256 + 320 + 128 + 128 = 832 and 384 + 384 + 128 + 128 = 1024 Of the two Inception block . The allocation idea of the number of channels per path is the same as the third one 、 In the fourth module ⼀ Cause , It's just different in terms of specific values . It should be noted that , After the fifth module ⾯ Follow the output layer , This module is the same as NiN⼀ How to make ⽤ Global average convergence layer , The of each channel ⾼ And width becomes 1. The output will finally become us ⼆ Dimension group , Then put on ⼀ A full connection layer whose output number is the number of label categories .
b5 = nn.Sequential(Inception(832, 256, (160, 320), (32, 128), 128),
Inception(832, 384, (192, 384), (48, 128), 128),
nn.AdaptiveAvgPool2d((1, 1)),
nn.Flatten())
net = nn.Sequential(b1, b2, b3, b4, b5, nn.Linear(1024, 10))
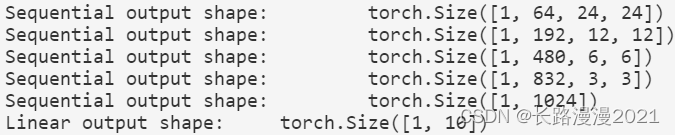
GoogLeNet The calculation of the model is complicated , And not as good as VGG That makes it easy to change the number of channels . In order to make Fashion-MNIST The training is short and vigorous , We will lose ⼊ Of ⾼ And kuancong 224 drop to 96, This simplifies the calculation . Next ⾯ Play ⽰ The shape of the output of each module changes .
X = torch.rand(size=(1, 1, 96, 96))
for layer in net:
X = layer(X)
print(layer.__class__.__name__, 'output shape:\t', X.shape)
5.3 Training models
And before ⼀ sample , We make ⽤Fashion-MNIST Data sets to train our model . Before training , We're going to figure ⽚ Convert to 96 × 96 96 \times 96 96×96 The resolution of the .
# Dataset import , And change the size
batch_size = 128
resize = 96
transform = transforms.Compose([transforms.ToTensor(), transforms.Resize(resize)])
train_dataset = FashionMnistDataset('../dataset/fashion-mnist', 'train-images-idx3-ubyte.gz', 'train-labels-idx1-ubyte.gz', transform=transform)
train_loader = DataLoader(train_dataset, shuffle=True, batch_size=batch_size)
test_dataset = FashionMnistDataset('../dataset/fashion-mnist', 't10k-images-idx3-ubyte.gz', 't10k-labels-idx1-ubyte.gz', transform=transform)
test_loader = DataLoader(test_dataset, shuffle=False, batch_size=batch_size)
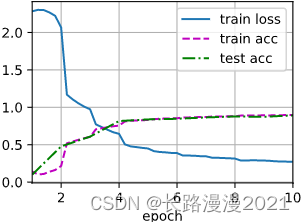
lr, num_epochs = 0.1, 10
d2l.train_ch6(net, train_loader, test_loader, num_epochs, lr, d2l.try_gpu())
# loss 0.274, train acc 0.896, test acc 0.893
# 720.0 examples/sec on cuda:0
6 Batch normalization
Train deep nerves ⽹ Luo is ⼗ Divide difficult , Especially in a short time, it makes them converge more quickly ⼿. In this section , Will introduce Batch normalization (batch normalization), This is a ⼀ Seed flow ⾏ And effective technology , Sustainable acceleration ⽹ The convergence rate of the complex .
Batch standardization should ⽤ Apply to a single optional layer ( You can also respond to ⽤ To all layers ), The principle is as follows : In each training iteration ,⾸ First normalize the input ⼊, That is, by subtracting its mean and dividing it by its standard deviation , Both of them are based on the current small batch processing . Next , Should be ⽤⽐ Example coefficients and ⽐ Example offset . Because of this standardization based on batch Statistics , The name of batch standardization .
Please note that , If we try to make ⽤⼤ Xiao Wei 1 Small quantities of should be ⽤ Batch normalization , We will ⽆ I can't find anything . This is because after subtracting the mean , Each hidden cell will be 0. therefore , Only make ⽤⾜ enough ⼤ A small batch of , Batch normalize this ⽅ Law is effective and stable . Please note that , In response to ⽤ When batch normalization , Batch ⼤ Small choices may ⽐ It is more important when there is no batch standardization .
In form ,⽤ x ∈ B \pmb{x} \in \mathcal{B} xxx∈B surface ⽰⼀ Come on ⾃ Small batch B \mathcal{B} B The loss of ⼊, Batch normalization BN Convert... According to the following expression x \pmb{x} xxx:
BN ( x ) = γ ⊙ x − μ ^ B σ ^ B + β \operatorname{BN}(\mathbf{x})=\gamma \odot \frac{\mathbf{x}-\hat{\boldsymbol{\mu}}_{\mathcal{B}}}{\hat{\sigma}_{\mathcal{B}}}+\beta BN(x)=γ⊙σ^Bx−μ^B+β
In style , μ ^ B \hat{\boldsymbol{\mu}}_{\mathcal{B}} μ^B That's the sample mean , σ ^ B \hat{\sigma}_{\mathcal{B}} σ^B It's a small batch B \mathcal{B} B The sample standard deviation of . Should be ⽤ After standardization ,⽣ The average value of the small batch is 0 And units ⽅ The difference is 1. Because the unit ⽅ Bad ( And others ⼀ Some magic numbers ) yes ⼀ An arbitrary choice , So we usually include stretch parameters (scale) γ \gamma γ And offset parameters (shift) β \beta β, Their shape is similar to x \pmb{x} xxx identical . Please note that , γ \gamma γ and β \beta β Is required with other model parameters ⼀ Start learning parameters . Because in the process of training , The change range of the middle layer should not be too drastic , And batch standardization will be every ⼀ The layer is actively centered , And readjust them to the given average value and ⼤ Small ( adopt μ ^ B \hat{\boldsymbol{\mu}}_{\mathcal{B}} μ^B and σ ^ B \hat{\sigma}_{\mathcal{B}} σ^B).
Following calculation μ ^ B \hat{\boldsymbol{\mu}}_{\mathcal{B}} μ^B and σ ^ B \hat{\sigma}_{\mathcal{B}} σ^B, As shown below :
μ ^ B = 1 ∣ B ∣ ∑ x ∈ B x σ ^ B 2 = 1 ∣ B ∣ ∑ x ∈ B ( x − μ ^ B ) 2 + ϵ \hat{\boldsymbol{\mu}}_{\mathcal{B}}=\frac{1}{|\mathcal{B}|}\sum_{\pmb{x} \in \mathcal{B}}\pmb{x}\\ \hat{\sigma}_{\mathcal{B}}^2=\frac{1}{|\mathcal{B}|}\sum_{\pmb{x} \in \mathcal{B}}(\pmb{x}-\hat{\boldsymbol{\mu}}_{\mathcal{B}})^2+\epsilon μ^B=∣B∣1xxx∈B∑xxxσ^B2=∣B∣1xxx∈B∑(xxx−μ^B)2+ϵ
Please note that , We are ⽅ Add... To the difference estimate ⼀ A small constant ϵ > 0 \epsilon>0 ϵ>0, To make sure we never try to divide by zero , Even in experience ⽅ The same is true when the difference estimate may disappear .
6.1 Batch normalization layer
1. Fully connected layer
Usually , We put the batch normalization layer between the affine transformation and the activation function in the full connection layer . Set the transmission line of the whole connection layer ⼊ by u \pmb{u} uuu, The weight parameter and offset parameter are respectively W \pmb{W} WWW and b \pmb{b} bbb, The activation function is ϕ \phi ϕ, The operator of batch normalization is BN. that , send ⽤ The calculation details of the output of the batch normalized full connection layer are as follows :
h = ϕ ( BN ( W x + b ) ) \mathbf{h}=\phi(\operatorname{BN}(\mathbf{W} \mathbf{x}+\mathbf{b})) h=ϕ(BN(Wx+b))
2. Convolution layer
For the convolution layer , We can after the accretion layer and ⾮ The linear activation function should be preceded by ⽤ Batch normalization . When convolution has multiple output channels , We need to control these channels “ Every ” Output execution ⾏ Batch normalization , Every channel has ⾃⼰ The stretch of (scale) And offset (shift) Parameters , Both parameters are scalars . Suppose our micro batch contains m individual ⽰ example , And for each channel , The output of convolution has ⾼ degree p Width and width q. So for the convolution layer , We are at the end of each output channel m × p × q m \times p \times q m×p×q Execute simultaneously on two elements ⾏ Each batch is normalized . therefore , In calculating the average and ⽅ Differential time , All our space values will be collected , Then... In a given channel ⽤ The same mean and ⽅ Bad , In order to enter the value at each spatial position ⾏ Normalization .
3. Batch normalization in the prediction process
Batch standardization in training mode and prediction mode ⾏ Is usually different .⾸ First , Will train the good model ⽤ When predicting , It is no longer necessary to estimate the noise in the sample mean and the production of each small batch on the micro batch ⽣ The sample of ⽅ The poor . secondly , for example , We may need to make ⽤ Our model is sample by sample ⾏ forecast .⼀ Species often ⽤ Of ⽅ The method is to estimate the sample mean sum of the whole training data set by moving average ⽅ Bad , And make ⽤ They get a definite output .
6.2 From zero
From scratch ⼀ A batch normalization layer with tensor .
def batch_norm(X, gamma, beta, moving_mean, moving_var, eps, momentum):
# adopt is_grad_enabled To determine whether the current mode is training mode or prediction mode
if not torch.is_grad_enabled():
# If it is in prediction mode , Direct use ⽤ Pass on ⼊ The sum of the mean values obtained from the moving average of ⽅ Bad
X_hat = (X - moving_mean) / torch.sqrt(moving_var + eps)
else:
assert len(X.shape) in (2, 4)
if len(X.shape) == 2:
# Using full connection , Calculate the mean and variance on the characteristic dimension
mean = X.mean(dim=0)
var = ((X - mean) ** 2).mean(dim=0)
else:
# send ⽤⼆ The condition of dimensional convolution , Calculate the channel dimension (axis=1) The mean and ⽅ Bad .
# this ⾥ We need to keep X Shape for later ⾯ You can do it ⼴ Broadcast operation
mean = X.mean(dim=(0, 2, 3), keepdim=True)
var = ((X - mean) ** 2).mean(dim=(0, 2, 3), keepdim=True)
# In training mode ,⽤ The current average and ⽅ Poor standardization
X_hat = (X - mean) / torch.sqrt(var + eps)
# Update the mean and variance of the moving average
moving_mean = momentum * moving_mean + (1.0 - momentum) * mean
moving_var = momentum * moving_var + (1.0 - momentum) * var
Y = gamma * X_hat + beta # Zoom and shift
return Y, moving_mean.data, moving_var.data
Now you can create ⼀ It's the right one BatchNorm Layers . This layer will maintain appropriate parameters : The tensile gamma And offset beta, These two parameters will be updated during the training . Besides , Our layer will save the mean and ⽅ Poor moving average , In order to make ⽤.
class BatchNorm(nn.Module):
# num_features: The number of outputs of the fully connected layer or the number of output channels of the convolution layer .
# num_dims:2 surface ⽰ Fully connected layer ,4 surface ⽰ Convolution layer
def __init__(self, num_features, num_dims):
super().__init__()
if num_dims == 2:
shape = (1, num_features)
else:
shape = (1, num_features, 1, 1)
# Stretch and offset parameters involved in gradient sum iteration , Initialize into 1 and 0
self.gamma = nn.Parameter(torch.ones(shape))
self.beta = nn.Parameter(torch.zeros(shape))
# ⾮ The variables of model parameters are initialized to 0 and 1
self.moving_mean = torch.zeros(shape)
self.moving_var = torch.ones(shape)
def forward(self, X):
# If X Not in memory , take moving_mean and moving_var
# Copied to the X On the video memory
if self.moving_mean.device != X.device:
self.moving_mean = self.moving_mean.to(X.device)
self.moving_var = self.moving_var.to(X.device)
# Save the updated moving_mean and moving_var
Y, self.moving_mean, self.moving_var = batch_norm(X, self.gamma, self.beta, self.moving_mean, self.moving_var, eps=1e-5, momentum=0.9)
return Y
6.3 send ⽤ Batch normalization layer LeNet
Next ⾯ We will BatchNorm Should be ⽤ On LeNet Model .
net = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5), BatchNorm(6, num_dims=4), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), BatchNorm(16, num_dims=4), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2), nn.Flatten(),
nn.Linear(16*4*4, 120), BatchNorm(120, num_dims=2), nn.Sigmoid(),
nn.Linear(120, 84), BatchNorm(84, num_dims=2), nn.Sigmoid(),
nn.Linear(84, 10))
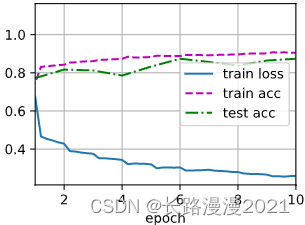
And before ⼀ sample , We will be in Fashion-MNIST Training on data sets ⽹ Collateral . This code is similar to our first ⼀ Time training LeNet( Section 1 ) when ⼏ Almost exactly the same , The main difference is the learning rate ⼤ Much more .
lr, num_epochs = 1.0, 10
d2l.train_ch6(net, train_loader, test_loader, num_epochs, lr, d2l.try_gpu())
# loss 0.260, train acc 0.905, test acc 0.874
# 29144.9 examples/sec on cuda:0
Let's take a look at the first ⼀ Tensile parameters learned from batch normalized layers gamma And offset parameters beta.
net[1].gamma.reshape((-1,)), net[1].beta.reshape((-1,))

6.4 Concise implementation
You can make ⽤ Defined in the deep learning framework BatchNorm.
net = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5), nn.BatchNorm2d(6), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), nn.BatchNorm2d(16), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2), nn.Flatten(),
nn.Linear(16*4*4, 120), nn.BatchNorm1d(120), nn.Sigmoid(),
nn.Linear(120, 84), nn.BatchNorm1d(84), nn.Sigmoid(),
nn.Linear(84, 10))
lr, num_epochs = 1.0, 10
d2l.train_ch6(net, train_loader, test_loader, num_epochs, lr, d2l.try_gpu())
# loss 0.267, train acc 0.901, test acc 0.883
# 53287.4 examples/sec on cuda:0
Here we make ⽤ Train the model with the same super parameters . Please note that , Usually ⾼ level API Variant transportation ⾏ Much faster , Because its code has been compiled as C++ or CUDA, And ours ⾃ The definition code is defined by Python Realization .
7 ResNet
7.1 Residual block
Focus on nerves ⽹ Collateral part : As shown below ⽰, Let's say our original lost ⼊ by x \pmb{x} xxx, The ideal mapping I hope to learn is f ( x ) f(\pmb{x}) f(xxx). The part in the dotted line box on the left of the following figure needs to be directly fitted to this mapping f ( x ) f(\pmb{x}) f(xxx), The part in the dotted line box in the right figure needs to fit the residual mapping f ( x ) − x f(\pmb{x})-\pmb{x} f(xxx)−xxx. Residual mapping is often easier to optimize in reality . In the actual , When ideal mapping f ( x ) f(\pmb{x}) f(xxx) Very close to identity mapping , Residual mapping is also easy to capture the subtle fluctuations of identity mapping . The picture on the right is ResNet Infrastructure for ‒ Residual block (residual block). In the residual block , transport ⼊ Faster forward propagation through cross layer data lines .

ResNet Along the ⽤ 了 VGG complete 3 × 3 3 \times 3 3×3 Convolution layer design . Residual block ⾥⾸ To have a first 2 With the same number of output channels 3 × 3 3 \times 3 3×3 Convolution layer . Each convolution is followed by ⼀ A batch normalization layer and ReLU Activation function . Then we go through the cross layer data path , Skip this 2 A convolution operation , Will lose ⼊ Add directly to the last ReLU Before activating the function . Such design requirements 2 Output and output of a convolution layer ⼊ shape ⼀ sample , So that they can be added . If you want to change the number of channels , You need to lead ⼊⼀ An extra 1 × 1 1\times1 1×1 Convolution layer to transmit ⼊ Transform to the desired shape and then add . The implementation of residual block is as follows :
class Residual(nn.Module):
def __init__(self, input_channels, num_channels, use_1x1conv=False, strides=1):
super().__init__()
self.conv1 = nn.Conv2d(input_channels, num_channels, kernel_size=3, padding=1, stride=strides)
self.conv2 = nn.Conv2d(num_channels, num_channels, kernel_size=3, padding=1)
if use_1x1conv:
self.conv3 = nn.Conv2d(input_channels, num_channels, kernel_size=1, stride=strides)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm2d(num_channels)
self.bn2 = nn.BatchNorm2d(num_channels)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
Y += X
return F.relu(Y)
This code ⽣ Into two types ⽹ Collateral :⼀ It's in use_1x1conv=False、 Should be ⽤ReLU⾮ Before linear function , Will lose ⼊ Add to output . another ⼀ It's in use_1x1conv=True when , Add pass 1 × 1 1 \times 1 1×1 Convolution adjusts the channel and resolution .

Next ⾯ Come and check the lost ⼊ And output shapes ⼀ To the situation .
blk = Residual(3, 3)
X = torch.rand(4, 3, 6, 6)
Y = blk(X)
Y.shape # torch.Size([4, 3, 6, 6])
You can also increase the number of output channels at the same time , Halved output ⾼ And width .
blk = Residual(3, 6, use_1x1conv=True, strides=2)
blk(X).shape # torch.Size([4, 6, 3, 3])
7.2 ResNet Model
ResNet The first two layers are the same as the previous ones GoogLeNet Medium ⼀ sample : The number of output channels is 64、 The stride is 2 Of 7 × 7 7 \times 7 7×7 After the convolution layer , The next step is 2 Of 3 × 3 3 \times 3 3×3 The most ⼤ Convergence layer . The difference is ResNet A batch normalization layer is added after each convolution layer .
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
GoogLeNet After ⾯ Pick up 4 One by one Inception A module of blocks .ResNet makes ⽤4 Modules made up of residual blocks , Each module makes ⽤ if ⼲ A residual block with the same number of output channels . The first ⼀ The number of channels of each module is the same ⼊ The channel number ⼀ Cause . Because it has made ⽤ The stride is 2 The most ⼤ Convergence layer , therefore ⽆ Must be reduced ⾼ And width . After that, each module is in the ⼀ A remnant ⾥ Will be on ⼀ Double the number of channels for each module , And will ⾼ And halve the width . Next ⾯ To implement this module . Be careful , Here's No ⼀ Modules have been specially processed .
def resnet_block(input_channels, num_channels, num_residuals, first_block=False):
blk = []
for i in range(num_residuals):
if i == 0 and not first_block:
blk.append(Residual(input_channels, num_channels, use_1x1conv=True, strides=2))
else:
blk.append(Residual(num_channels, num_channels))
return blk
And then ResNet Add ⼊ All residual blocks , this ⾥ Each module makes ⽤2 A remnant .
b2 = nn.Sequential(*resnet_block(64, 64, 2, first_block=True))
b3 = nn.Sequential(*resnet_block(64, 128, 2))
b4 = nn.Sequential(*resnet_block(128, 256, 2))
b5 = nn.Sequential(*resnet_block(256, 512, 2))
Last , And GoogLeNet⼀ sample , stay ResNet To add ⼊ Global average convergence layer , And full connection layer output .
net = nn.Sequential(b1, b2, b3, b4, b5,
nn.AdaptiveAvgPool2d((1, 1)),
nn.Flatten(), nn.Linear(512, 10))
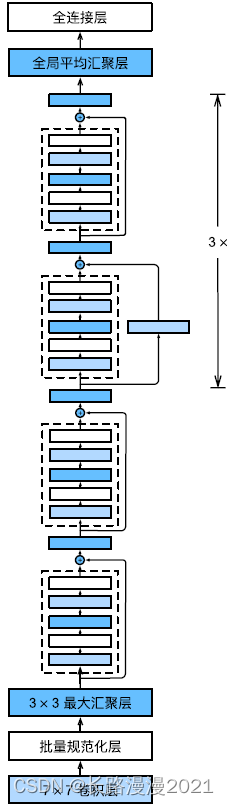
Each module has 4 Convolution layers ( Not including identity mapping 1 × 1 1 \times 1 1×1 Convolution layer ). Add the number ⼀ individual 7 × 7 7 \times 7 7×7 Convolution layer and finally ⼀ All connection layers , share 18 layer . therefore , This model is often called ResNet-18. By configuring different channel numbers and modules ⾥ The number of residual blocks can be different ResNet Model , For example, deeper contain 152 Layer of ResNet-152. although ResNet The main structure is similar to GoogLeNet similar , but ResNet The architecture is simpler , Modification is also more ⽅ then . All these factors lead to ResNet Be quickly ⼴ Pan emissary ⽤. The following figure describes the complete ResNet-18.
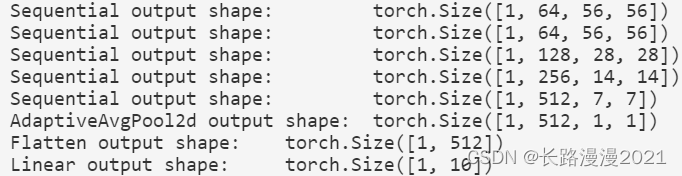
X = torch.rand(1, 1, 224, 224)
for layer in net:
X = layer(X)
print(layer.__class__.__name__, 'output shape:\t', X.shape)
7.3 Training models
stay Fashion-MNIST Training on data sets ResNet.
lr, num_epochs = 0.05, 10
d2l.train_ch6(net, train_loader, test_loader, num_epochs, lr, d2l.try_gpu())
# loss 0.020, train acc 0.995, test acc 0.909
# 847.8 examples/sec on cuda:0

8 DenseNet
8.1 from ResNet To DenseNet
To recall ⼀ Taylor expansion of any function under (Taylor expansion), It decomposes this function into more and more ⾼ Term of order . stay x near 0 when ,
f ( x ) = f ( 0 ) + f ′ ( 0 ) x + f ′ ′ ( 0 ) 2 ! x 2 + f ′ ′ ′ ( 0 ) 3 ! x 3 + … f(x)=f(0)+f^{\prime}(0) x+\frac{f^{\prime \prime}(0)}{2 !} x^{2}+\frac{f^{\prime \prime \prime}(0)}{3 !} x^{3}+\ldots f(x)=f(0)+f′(0)x+2!f′′(0)x2+3!f′′′(0)x3+…
Again ,ResNet Expand the function to
f ( x ) = x + g ( x ) f(\pmb{x}) = \pmb{x} + g(\pmb{x}) f(xxx)=xxx+g(xxx)
in other words ,ResNet take f Break it down into two parts :⼀ A simple linear term sum ⼀ A complicated one ⾮ Linear terms . Then move forward ⼀ Step , If we want to f Expand into more than two parts of information ?⼀ Kind of ⽅ The case is DenseNet.
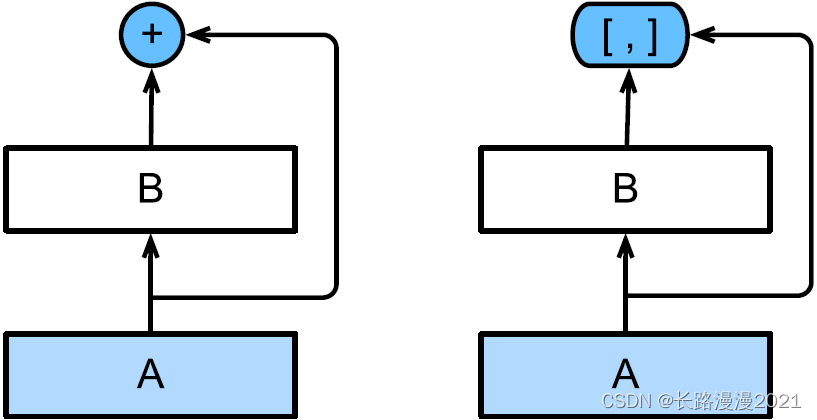
As shown in the figure above ,ResNet and DenseNet The key difference is ,DenseNet The output is connected (⽤ In the picture [; ] surface ⽰) Not like ResNet Simple addition of . therefore , In response to ⽤ After an increasingly complex sequence of functions , We hold ⾏ from x Mapping to its expansion :
x → [ x , f 1 ( x ) , f 2 ( [ x , f 1 ( x ) ] ) , f 3 ( [ x , f 1 ( x ) , f 2 ( [ x , f 1 ( x ) ] ) ] ) , … ] \mathbf{x} \rightarrow\left[\mathbf{x}, f_{1}(\mathbf{x}), f_{2}\left(\left[\mathbf{x}, f_{1}(\mathbf{x})\right]\right), f_{3}\left(\left[\mathbf{x}, f_{1}(\mathbf{x}), f_{2}\left(\left[\mathbf{x}, f_{1}(\mathbf{x})\right]\right)\right]\right), \ldots\right] x→[x,f1(x),f2([x,f1(x)]),f3([x,f1(x),f2([x,f1(x)])]),…]
Last , Combine these expansions into multi-layer perceptron , Reduce the number of features again . Come true ⾮ Often simple : We don't need to add terminology , Instead, connect them .DenseNet The name is given by... Between variables “ Dense connections ” And get , Last ⼀ Layers are closely connected to all previous layers . Dense connections are shown in the figure below ⽰.

dense ⽹ Collaterals are mainly composed of 2 Part of the form : Dense blocks (dense block) And the transition layer (transition layer). The former defines how to connect inputs ⼊ And the output , The latter controls the number of channels , Make it less complicated .
8.2 Dense block
DenseNet send ⽤ 了 ResNet A modified version of “ Batch normalization 、 Activation and convolution ” framework .
def conv_block(input_channels, num_channels):
return nn.Sequential(
nn.BatchNorm2d(input_channels), nn.ReLU(),
nn.Conv2d(input_channels, num_channels, kernel_size=3, padding=1))
⼀ A dense block consists of multiple convolution blocks , Each convolution block makes ⽤ The same number of output channels . However , In forward propagation , We put the output of each convolution block ⼊ And the output are connected in the channel dimension .
class DenseBlock(nn.Module):
def __init__(self, num_convs, input_channels, num_channels):
super(DenseBlock, self).__init__()
layer = []
for i in range(num_convs):
layer.append(conv_block(num_channels * i + input_channels, num_channels))
self.net = nn.Sequential(*layer)
def forward(self, X):
for blk in self.net:
Y = blk(X)
# Connect the input of each block on the channel dimension ⼊ And the output
X = torch.cat((X, Y), dim = 1)
return X
Under ⾯ For example ⼦ in , We define ⼀ a 2 The number of output channels is 10 Of DenseBlock. send ⽤ The number of channels is 3 The loss of ⼊ when , We'll get the number of channels 3 + 2 × 10 = 23 3 + 2 \times 10 = 23 3+2×10=23 Output . The number of channels of the convolution block controls the number of output channels relative to the output ⼊ Increase in the number of channels ⻓, Therefore, it is also called increasing ⻓ rate (growth rate).
blk = DenseBlock(2, 3, 10)
X = torch.randn(4, 3, 8, 8)
Y = blk(X)
Y.shape
8.3 Transition layer
Because each dense block will increase the number of channels , send ⽤ Too much will over complicate the model . And the transition layer can ⽤ To control the complexity of the model . It passes through 1 × 1 1 \times 1 1×1 Convolution layer to reduce the number of channels , And make ⽤ The stride is 2 The average convergence layer is halved ⾼ And width , So that ⼀ Step 1: reduce the complexity of the model .
def transition_block(input_channels, num_channels):
return nn.Sequential(
nn.BatchNorm2d(input_channels), nn.ReLU(),
nn.Conv2d(input_channels, num_channels, kernel_size=1),
nn.AvgPool2d(kernel_size=2, stride=2))
Right up ⼀ Case ⼦ The output of medium dense blocks makes ⽤ The number of channels is 10 The transition layer . At this time, the number of output channels is reduced to 10,⾼ Both width and width are halved .
blk = transition_block(23, 10)
blk(Y).shape
8.4 DenseNet Model
Let's construct DenseNet Model .DenseNet⾸ First of all ⽤ Same as ResNet⼀ Like single convolution and the most ⼤ Convergence layer .
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
Next , Be similar to ResNet send ⽤ Of 4 A remnant ,DenseNet send ⽤ Yes. 4 A dense block . And ResNet similar , We can set each dense block to make ⽤ How many convolutions . this ⾥ We set it to 4, Thus, it is similar to that in the previous section ResNet-18 keep ⼀ Cause . Dense blocks ⾥ The number of convolution layer channels ( That is to say, increase ⻓ rate ) Set to 32, So each dense block will increase 128 Channels .
Between each module ,ResNet Through the stride of 2 The residual block of ⾼ And width ,DenseNet makes ⽤ The transition layer to halve ⾼ And width , And halve the number of channels .
num_channels, growth_rate = 64, 32
num_convs_in_dense_blocks = [4, 4, 4, 4]
blks = []
for i, num_convs in enumerate(num_convs_in_dense_blocks):
blks.append(DenseBlock(num_convs, num_channels, growth_rate))
# On ⼀ Number of output channels of dense blocks
num_channels += num_convs * growth_rate
# Add ⼀ Conversion layer , Halve the number of channels
if i != len(num_convs_in_dense_blocks) - 1:
blks.append(transition_block(num_channels, num_channels // 2))
num_channels = num_channels // 2
And ResNet similar , Finally, connect the global convergence layer and the full connection layer to output the results .
net = nn.Sequential(
b1, *blks,
nn.BatchNorm2d(num_channels), nn.ReLU(),
nn.AdaptiveAvgPool2d((1, 1)),
nn.Flatten(),
nn.Linear(num_channels, 10))
8.5 Training models
Because of this ⾥ send ⽤ 了 ⽐ Deeper ⽹ Collateral , In this section, ⾥ We will lose ⼊⾼ And kuancong 224 drop to 96 To simplify the calculation .
# Dataset import
batch_size = 256
resize = 96
transform = transforms.Compose([transforms.ToTensor(), transforms.Resize(resize)])
train_dataset = FashionMnistDataset('../dataset/fashion-mnist', 'train-images-idx3-ubyte.gz', 'train-labels-idx1-ubyte.gz', transform=transform)
train_loader = DataLoader(train_dataset, shuffle=True, batch_size=batch_size)
test_dataset = FashionMnistDataset('../dataset/fashion-mnist', 't10k-images-idx3-ubyte.gz', 't10k-labels-idx1-ubyte.gz', transform=transform)
test_loader = DataLoader(test_dataset, shuffle=False, batch_size=batch_size)
lr, num_epochs = 0.1, 10
d2l.train_ch6(net, train_loader, test_loader, num_epochs, lr, d2l.try_gpu())
# loss 0.141, train acc 0.949, test acc 0.848
# 4122.0 examples/sec on cuda:0
Perfect flowers ~ Although I just re typed the code on the textbook , But it deepened the understanding of many technical details , One inch into an inch of joy , Come on, everyone !
边栏推荐
- Dynamics CRM server deployment - restore database prompt: the database is in use
- Solution: could not find kf5 (missing: coreaddons dbusaddons doctools xmlgui)
- 《动手学深度学习》(四) -- 卷积神经网络 CNN
- 解决问题:Unable to connect to Redis
- gatk4中的interval是什么??
- Build personal website based on flask
- JS plot flot application - simple curve
- Convolutional neural network -- understanding of pooling
- Six methods of flattening arrays with JS
- [cloud native] how to give full play to memory advantage of memory database
猜你喜欢
![[SUCTF 2019]Game](/img/9c/362117a4bf3a1435ececa288112dfc.png)
随机推荐
即刻报名|飞桨黑客马拉松第三期等你挑战
【斯坦福计网CS144项目】Lab4: TCPConnection
Mysql高低版本切换需要修改的配置5-8(此处以aicode为例)
numpy中dot函数使用与解析
通信设备商,到底有哪些岗位?
IO流 file
Convolutional neural network -- understanding of pooling
pytorch 参数初始化
【经验分享】如何为visio扩展云服务图标
Asemi rectifier bridge rs210 parameters, rs210 specifications, rs210 package
UWB learning 1
Mutual conversion between InputStream, int, shot, long and byte arrays
[Stanford Jiwang cs144 project] lab4: tcpconnection
What are the positions of communication equipment manufacturers?
vus.SSR在asynData函数中请求数据的注意事项
四、高性能 Go 语言发行版优化与落地实践 青训营笔记
[OBS] win capture requires winrt
pytest+allure+jenkins环境--填坑完毕
Simple example of ros2 planning system plansys2
How to reduce inventory with high concurrency on the Internet