当前位置:网站首页>继电反馈PID控制器参数自整定
继电反馈PID控制器参数自整定
2022-07-06 07:35:00 【ba_wang_mao】
今天来给大家介绍一种控制算法参数的自动整定的方法,这种方法就叫基于继电反馈自整定。
一、继电反馈原理
通过在电路中加入有继电特性的非线性环节得到持续稳定的振荡,进而求得中间参数:临界增益和临界周期,结合整定公式实现对PID的参数整定。通过继电反馈产生持续的振荡作为对Z-N临界比例度法的一种改进。

图1.1 继电自整定结构框图


,


h为继电器幅值,a-为输出信号幅值。

图1.2 继电和控制对象频域响应曲线


由奈奎斯特稳定判据得:

得:

临界值可以粗略得到:

二、基于Z-N法的PID参数整定

| 控制器类型 | KP | Tn | Tv | Ki | Kd |
| P | 0.5*Kμ | --- | --- | --- | --- |
| PD | 0.8*Kμ | --- | 0.12*Tμ | --- | KP*Tn |
| PI | 0.45*Kμ | 0.85*Tμ | --- | KP/ Tn | --- |
| PID | 0.6*Kμ | 0.5*Tμ | 0.12*Tμ | KP/ Tn | KP*Tn |
三、继电反馈PID自整定流程介绍
1、先利用继电器使得系统震荡,震荡的过程为:当反馈小于期望值时,输出正满控制量;当反馈大于期望值时,输出负满控制量,使系统强行震荡。
2、测量系统震荡时的幅值与周期,就可以得到系统的临界增益与震荡周期(震荡周期由曲线相邻峰值得到)
3、根据得到的临界增益与震荡周期,由Z-N表获得所需的PID参数。

图3.1 继电反馈自整定PID控制器效果图

图3.2 系统震荡效果图
四、总结
继电反馈法整定PID参数能够整定出PID参数,效果较好。但在仿真过程中,PI效果差强人意。总体方案实现简单,适用性较强。继电反馈法自整定PID参数广泛应用于温控系统,其他适用场景不明确。
边栏推荐
- [MySQL learning notes 29] trigger
- Typescript indexable type
- Sélectionnez toutes les lignes avec un symbole dans Word et changez - les en titre
- Compliance and efficiency, accelerate the digital transformation of pharmaceutical enterprises, and create a new document resource center for pharmaceutical enterprises
- Méthode d'obtention des propriétés de l'objet JS (.Et [] méthodes)
- 【mysql学习笔记30】锁(非教程)
- The way to learn go (II) basic types, variables and constants
- Do you really think binary search is easy
- Three no resumes in the software testing industry. What does the enterprise use to recruit you? Shichendahai's resume
- After the hot update of uniapp, "mismatched versions may cause application exceptions" causes and Solutions
猜你喜欢
Go learning --- use reflection to judge whether the value is valid
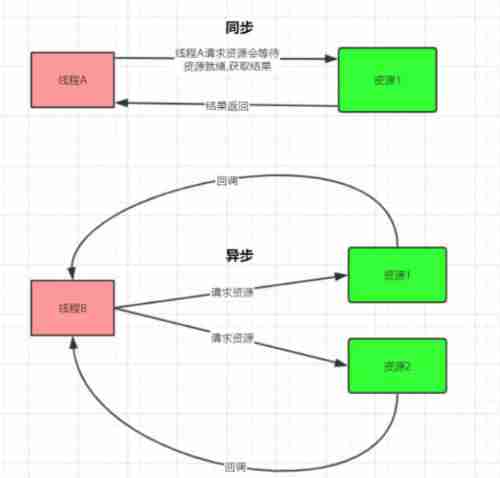
NiO programming introduction
TS 类型体操 之 extends,Equal,Alike 使用场景和实现对比
![Ble of Jerry [chapter]](/img/ed/32a5d045af8876d7b420ae9058534f.png)
Ble of Jerry [chapter]
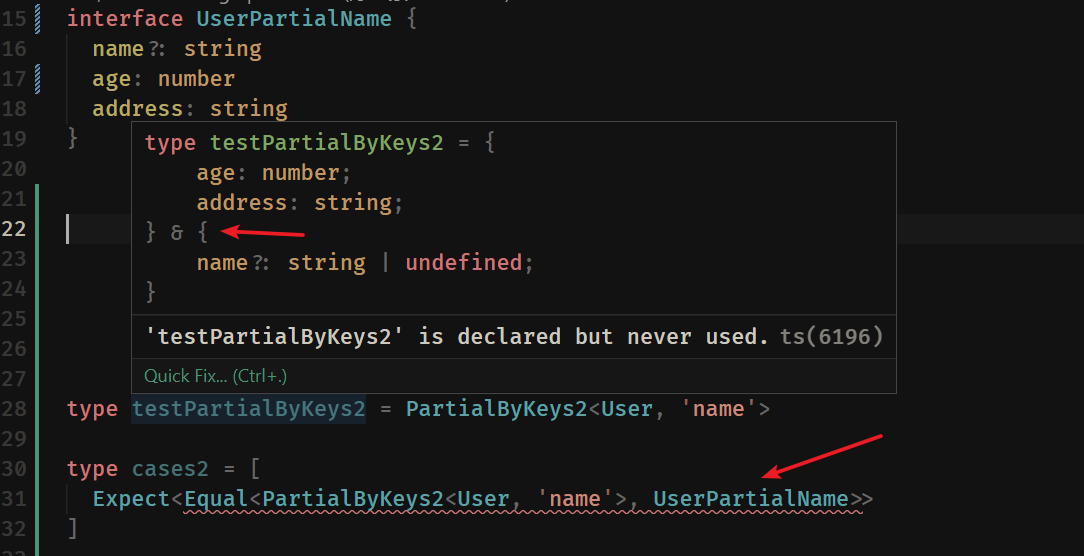
TS 类型体操 之 循环中的键值判断,as 关键字使用
杰理之BLE【篇】

QT color is converted to string and uint
Mise en œuvre du langage leecode - C - 15. Somme des trois chiffres - - - - - idées à améliorer
Comparison of usage scenarios and implementations of extensions, equal, and like in TS type Gymnastics

SSM learning

随机推荐
数字IC设计笔试题汇总(一)
Cf1036c class numbers solution
[computer skills]
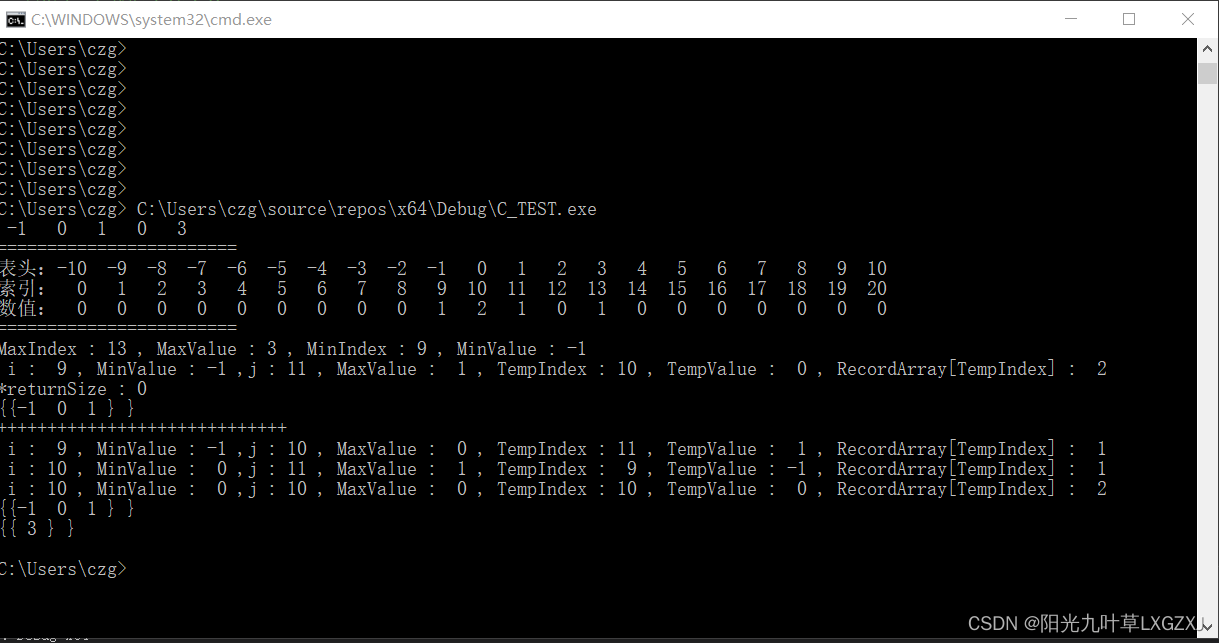
C语言 简单易懂的高精度加法
GET/POST/PUT/PATCH/DELETE含义
leecode-C语言实现-15. 三数之和------思路待改进版
Opencv learning notes 9 -- background modeling + optical flow estimation
NiO programming introduction
Pre knowledge reserve of TS type gymnastics to become an excellent TS gymnastics master
Brief explanation of instagram operation tips in 2022
Sélectionnez toutes les lignes avec un symbole dans Word et changez - les en titre
Sharing of source code anti disclosure scheme under burning scenario
Luogu p1836 number page solution
Supervisor usage document
C # connect to SQLite database to read content
Relevant introduction of clip image
Is the super browser a fingerprint browser? How to choose a good super browser?
Basics of reptile - Scratch reptile
Significance and measures of encryption protection for intelligent terminal equipment
C intercept string