当前位置:网站首页>esp32发布机器人电池电压到ros2(micro-ros+CoCube)
esp32发布机器人电池电压到ros2(micro-ros+CoCube)
2022-08-04 01:24:00 【zhangrelay】

示例程序测试端口ad数值:
#include "Arduino.h"
#include <ESP32AnalogRead.h>
ESP32AnalogRead adc;
void setup()
{
adc.attach(34);
Serial.begin(115200);
}
void loop()
{
delay(50);
Serial.println("Voltage = "+String(adc.readVoltage()));
}这只是一个简单测试ad口电压的程序,没有滤波,没有依据实际进行数值变换。
34是测量电压端口。
初始化,ad和串口波特率:
void setup()
{
adc.attach(34);
Serial.begin(115200);
}循环测电压并输出串口,时延50ms:
void loop()
{
delay(50);
Serial.println("Voltage = "+String(adc.readVoltage()));
}这是单片机简单测电压的程序。
需要补充滤波和标度变换。留作思考题。
效果如下图:

micro-ros发布一个消息案例如下:
#include <micro_ros_arduino.h>
#include <stdio.h>
#include <rcl/rcl.h>
#include <rcl/error_handling.h>
#include <rclc/rclc.h>
#include <rclc/executor.h>
#include <std_msgs/msg/int32.h>
#if !defined(ESP32) && !defined(TARGET_PORTENTA_H7_M7) && !defined(ARDUINO_NANO_RP2040_CONNECT)
#error This example is only avaible for Arduino Portenta, Arduino Nano RP2040 Connect and ESP32 Dev module
#endif
rcl_publisher_t publisher;
std_msgs__msg__Int32 msg;
rclc_support_t support;
rcl_allocator_t allocator;
rcl_node_t node;
#define LED_PIN 13
#define RCCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){error_loop();}}
#define RCSOFTCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){}}
void error_loop(){
while(1){
digitalWrite(LED_PIN, !digitalRead(LED_PIN));
delay(100);
}
}
void timer_callback(rcl_timer_t * timer, int64_t last_call_time)
{
RCLC_UNUSED(last_call_time);
if (timer != NULL) {
RCSOFTCHECK(rcl_publish(&publisher, &msg, NULL));
msg.data++;
}
}
void setup() {
set_microros_wifi_transports("***", "***", "***", 8888);
pinMode(LED_PIN, OUTPUT);
digitalWrite(LED_PIN, HIGH);
delay(2000);
allocator = rcl_get_default_allocator();
//create init_options
RCCHECK(rclc_support_init(&support, 0, NULL, &allocator));
// create node
RCCHECK(rclc_node_init_default(&node, "micro_ros_arduino_wifi_node", "", &support));
// create publisher
RCCHECK(rclc_publisher_init_best_effort(
&publisher,
&node,
ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Int32),
"topic_name"));
msg.data = 0;
}
void loop() {
RCSOFTCHECK(rcl_publish(&publisher, &msg, NULL));
msg.data++;
}需要修改哪些代码?
ROS1/2中的数据类型如下:
ROS Message Types
Bool
Byte
ByteMultiArray
Char
ColorRGBA
Duration
Empty
Float32
Float32MultiArray
Float64
Float64MultiArray
Header
Int16
Int16MultiArray
Int32
Int32MultiArray
Int64
Int64MultiArray
Int8
Int8MultiArray
MultiArrayDimension
MultiArrayLayout
String
Time
UInt16
UInt16MultiArray
UInt32
UInt32MultiArray
UInt64
UInt64MultiArray
UInt8
UInt8MultiArray
battery电池,电压情况:

高>4.1v为插入usb口,低为电池供电。

需要启动agent:

参考程序如下:
#include <micro_ros_arduino.h>
#include <stdio.h>
#include <rcl/rcl.h>
#include <rcl/error_handling.h>
#include <rclc/rclc.h>
#include <rclc/executor.h>
#include <std_msgs/msg/float32.h>
#if !defined(ESP32) && !defined(TARGET_PORTENTA_H7_M7) && !defined(ARDUINO_NANO_RP2040_CONNECT)
#error This example is only avaible for Arduino Portenta, Arduino Nano RP2040 Connect and ESP32 Dev module
#endif
#define BAT_DET 34
rcl_publisher_t publisher;
std_msgs__msg__Float32 msg;
rclc_support_t support;
rcl_allocator_t allocator;
rcl_node_t node;
#define LED_PIN 13
#define RCCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){error_loop();}}
#define RCSOFTCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){}}
void error_loop(){
while(1){
digitalWrite(LED_PIN, !digitalRead(LED_PIN));
delay(100);
}
}
void timer_callback(rcl_timer_t * timer, int64_t last_call_time)
{
RCLC_UNUSED(last_call_time);
if (timer != NULL) {
RCSOFTCHECK(rcl_publish(&publisher, &msg, NULL));
msg.data++;
}
}
void setup() {
set_microros_wifi_transports("***", "***", "***", 8888);
pinMode(BAT_DET, INPUT);
pinMode(LED_PIN, OUTPUT);
digitalWrite(LED_PIN, HIGH);
delay(2000);
allocator = rcl_get_default_allocator();
//create init_options
RCCHECK(rclc_support_init(&support, 0, NULL, &allocator));
// create node
RCCHECK(rclc_node_init_default(&node, "robot_battery_wifi_node", "", &support));
// create publisher
RCCHECK(rclc_publisher_init_best_effort(
&publisher,
&node,
ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Float32),
"robot_battery"));
msg.data = 0.66;
}
void loop() {
float battery = 4.21 * analogRead(BAT_DET) / 2435;
RCSOFTCHECK(rcl_publish(&publisher, &msg, NULL));
msg.data=battery;
delay(1000);
}边栏推荐
猜你喜欢
![Please refer to dump files (if any exist) [date].dump, [date]-jvmRun[N].dump and [date].dumpstream.](/img/10/87c0bedd49b5dce6fbcd28ac361145.png)
Please refer to dump files (if any exist) [date].dump, [date]-jvmRun[N].dump and [date].dumpstream.
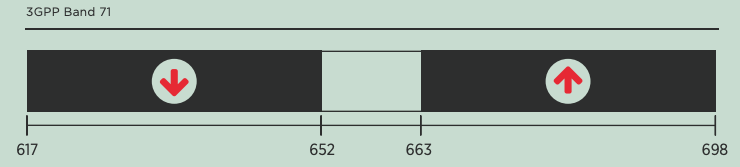
600MHz频段来了,它会是新的黄金频段吗?

共享新能源充电桩充电站建设需要些什么流程及资料?
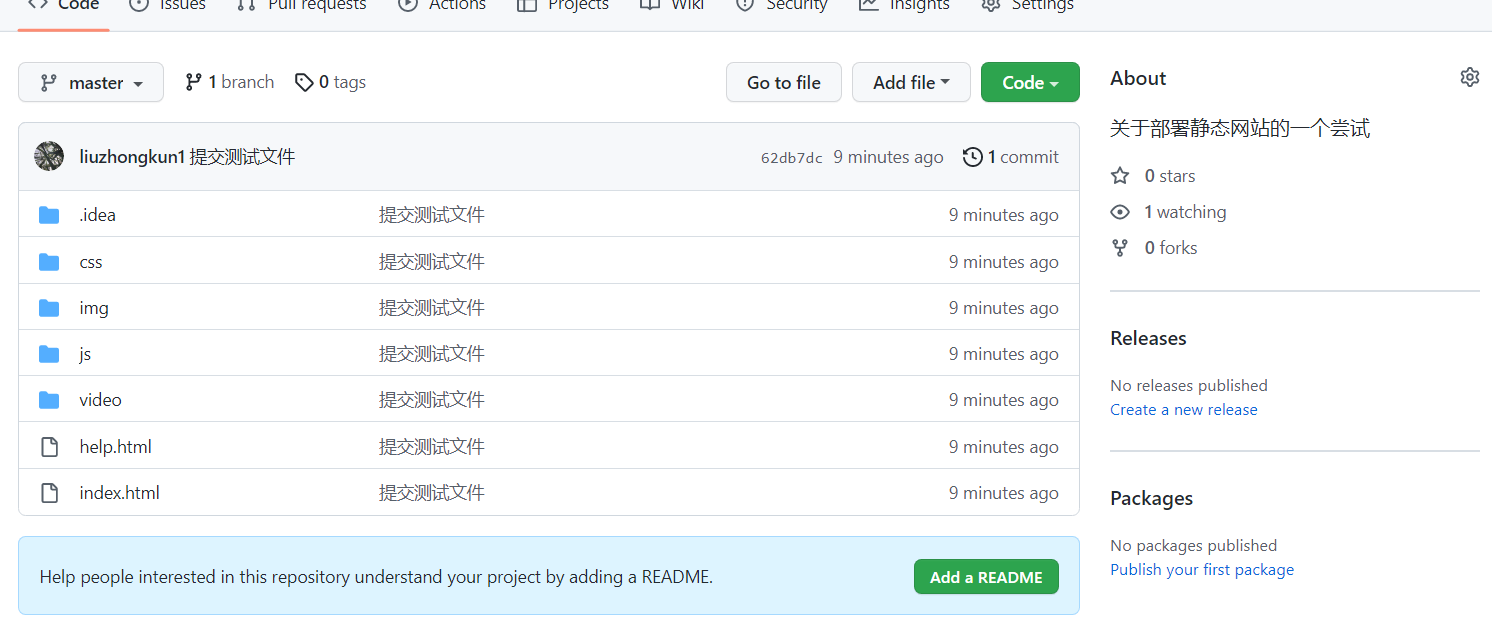
静态文件快速建站
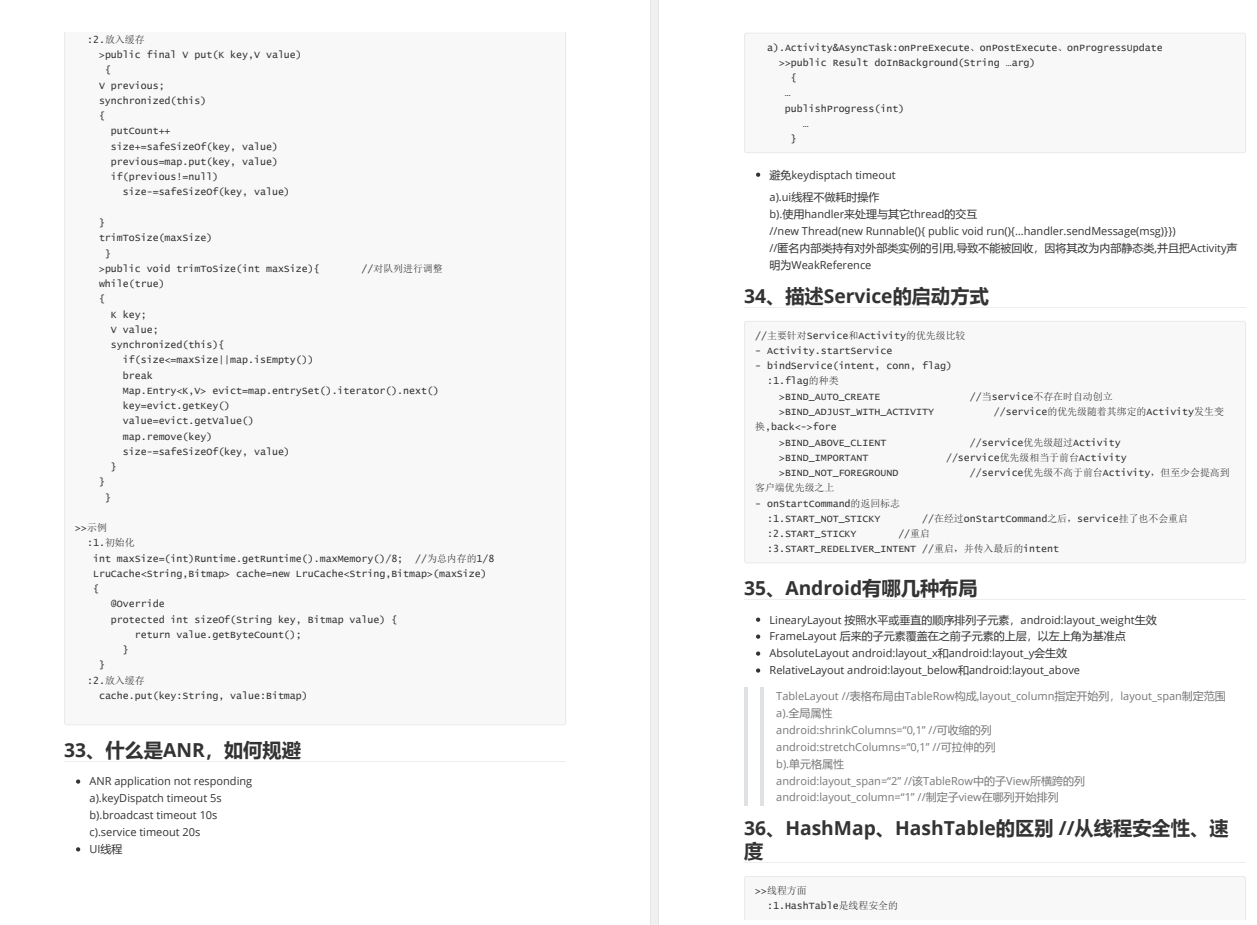
2022年上半年各大厂Android面试题整理及答案解析(持续更新中......)

Tanabata festival coming, VR panoramic look god assists for you

JS 从零教你手写节流throttle
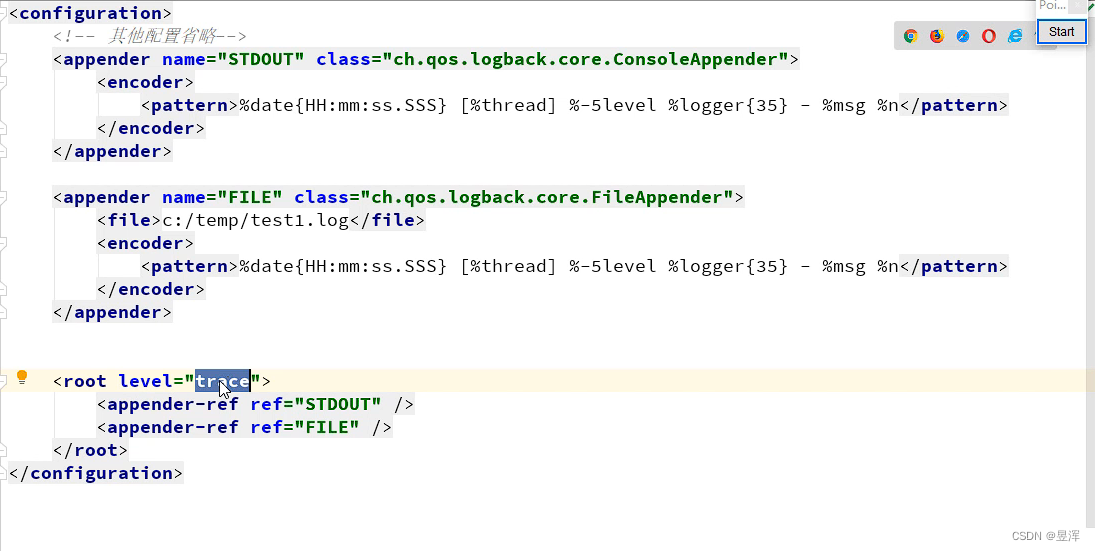
【日志框架】
The 600MHz band is here, will it be the new golden band?
GraphQL背后处理及执行过程是什么
随机推荐
typescript54-泛型约束
How to find the cause of Fiori Launchpad routing errors by single-step debugging
网络带宽监控,带宽监控工具哪个好
Eight things to pay attention to in spot silver
MATLAB三维绘图命令plot3入门
Tanabata festival coming, VR panoramic look god assists for you
ThreadLocal
【链路聚合原理及配置】
Google Earth Engine - Calculates the effective width of rivers using publicly available river data
Please refer to dump files (if any exist) [date].dump, [date]-jvmRun[N].dump and [date].dumpstream.
螺旋矩阵_数组 | leecode刷题笔记
字符串变形
pygame 中的transform模块
2022 China Computing Power Conference released the excellent results of "Innovation Pioneer"
C 学生管理系统 显示链表信息、删除链表
Apache DolphinScheduler actual combat task scheduling platform - a new generation of distributed workflow
即席查询——Presto
JS 从零教你手写节流throttle
Thinkphp commonly used techniques
【虚拟化生态平台】虚拟化平台esxi挂载USB硬盘