当前位置:网站首页>[personnel density detection] matlab simulation of personnel density detection based on morphological processing and GRNN network
[personnel density detection] matlab simulation of personnel density detection based on morphological processing and GRNN network
2022-07-02 03:41:00 【FPGA and MATLAB】
1. Software version
matlab2015b
2. Description of algorithm
The population density is divided into three levels ,(1) Green reminder in rare and uncrowded situations .(2) In a crowded situation , Yellow warning .(3) Very crowded , Red alarm . Different crowd densities are displayed on the interface in real time through corresponding alarm levels
There are two ways to classify population density :
(1) Estimate the number of people on the scene , According to the number of people , Judge the population density .
(2) Extract and analyze the overall characteristics of the population , The training sample , Use classifier to learn classification .
First, texture extraction of video , The method used is gray level co-occurrence matrix :
http://wenku.baidu.com/view/d60d9ff5ba0d4a7302763ae1.html?from=search
And then through GRNN Neural network training recognition algorithm :
Generalized regression neural network (Generalized regression neural network, GRNN) It is a neural network based on nonparametric kernel regression , Calculate the probability density function between the independent variable and the dependent variable by observing samples .GRNN Structure is shown in figure 1 Shown , The whole network consists of four layers of neurons : Input layer 、 Pattern layer 、 Summation layer and output layer .
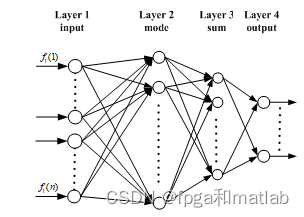
GRNN The performance of neural networks , It is mainly set by the smoothing factor of the kernel function of its implicit regression unit , Different smoothing factors can obtain different network performance . The number of neurons in the input layer is related to the dimension of the input vector in the learning sample m equal . Each neuron corresponds to a different learning sample , In the mode layer i The transfer function of neurons is :
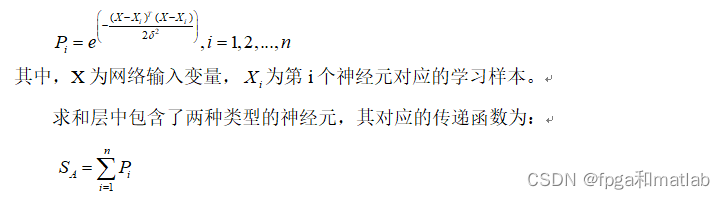
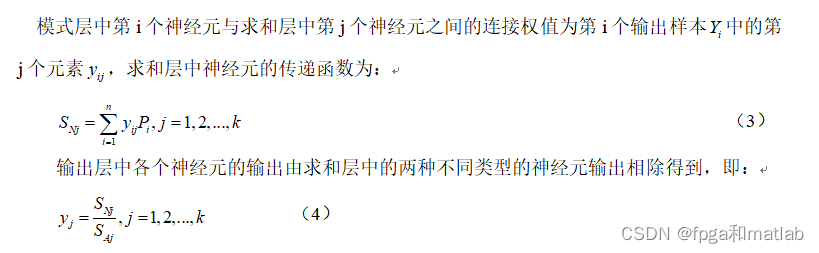
From this we can see that , After selecting the learning sample ,GRNN The structure and weight of the network are completely determined , So train GRNN Network is better than training BP The Internet and RBF The network is much more convenient . Based on the above GRNN The output calculation formula of each layer of the network , Whole GRNN The output of the network can be expressed as :

3. Part of the source code
function pushbutton2_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
global frameNum_Original;
global frameNum_Originals;
global Obj;
%%
% Parameter initialization
% Process video size
RR = 200;
CC = 300;
K = 3; % Components
Alpha = 0.02; % Adapt weight speed
Rho = 0.01; % Adaptive weighted velocity covariance
Deviation_sq = 49; % The threshold is used to find a match
Variance = 2; % The initial variance is the newly placed component
Props = 0.00001; % Initially for new placement
Back_Thresh = 0.8; % The proportion of body weight must account for the background model
Comp_Thresh = 10; % Filter out the smaller dimensions of the connecting components
SHADOWS =[0.7,0.25,0.85,0.95]; % Set the shadow removal threshold
CRGB = 3;
D = RR * CC;
Temps = zeros(RR,CC,CRGB,'uint8');
Temps = imresize(read(Obj,1),[RR,CC]);
Temps = reshape(Temps,size(Temps,1)*size(Temps,2),size(Temps,3));
Mus = zeros(D,K,CRGB);
Mus(:,1,:) = double(Temps(:,:,1));
Mus(:,2:K,:) = 255*rand([D,K-1,CRGB]);
Sigmas = Variance*ones(D,K,CRGB);
Weights = [ones(D,1),zeros(D,K-1)];
Squared = zeros(D,K);
Gaussian = zeros(D,K);
Weight = zeros(D,K);
background = zeros(RR,CC,frameNum_Original);
Shadows = zeros(RR,CC);
Images0 = zeros(RR,CC,frameNum_Original);
Images1 = zeros(RR,CC,frameNum_Original);
Images2 = zeros(RR,CC,frameNum_Original);
background_Update = zeros(RR,CC,CRGB,frameNum_Original);
indxx = 0;
for tt = frameNum_Originals
disp(' The current frame number ');
tt
indxx = indxx + 1;
pixel_original = read(Obj,tt);
pixel_original2 = imresize(pixel_original,[RR,CC]);
Temp = zeros(RR,CC,CRGB,'uint8');
Temp = pixel_original2;
Temp = reshape(Temp,size(Temp,1)*size(Temp,2),size(Temp,3));
image = Temp;
for kk = 1:K
Datac = double(Temp)-reshape(Mus(:,kk,:),D,CRGB);
Squared(:,kk) = sum((Datac.^ 2)./reshape(Sigmas(:,kk,:),D,CRGB),2);
end
[junk,index] = min(Squared,[],2);
Gaussian = zeros(size(Squared));
Gaussian(sub2ind(size(Squared),1:length(index),index')) = ones(D,1);
Gaussian = Gaussian&(Squared<Deviation_sq);
% Parameters are updated
Weights = (1-Alpha).*Weights+Alpha.*Gaussian;
for kk = 1:K
pixel_matched = repmat(Gaussian(:,kk),1,CRGB);
pixel_unmatched = abs(pixel_matched-1);
Mu_kk = reshape(Mus(:,kk,:),D,CRGB);
Sigma_kk = reshape(Sigmas(:,kk,:),D,CRGB);
Mus(:,kk,:) = pixel_unmatched.*Mu_kk+pixel_matched.*(((1-Rho).*Mu_kk)+(Rho.*double(image)));
Mu_kk = reshape(Mus(:,kk,:),D,CRGB);
Sigmas(:,kk,:) = pixel_unmatched.*Sigma_kk+pixel_matched.*(((1-Rho).*Sigma_kk)+repmat((Rho.* sum((double(image)-Mu_kk).^2,2)),1,CRGB));
end
replaced_gaussian = zeros(D,K);
mismatched = find(sum(Gaussian,2)==0);
for ii = 1:length(mismatched)
[junk,index] = min(Weights(mismatched(ii),:)./sqrt(Sigmas(mismatched(ii),:,1)));
replaced_gaussian(mismatched(ii),index) = 1;
Mus(mismatched(ii),index,:) = image(mismatched(ii),:);
Sigmas(mismatched(ii),index,:) = ones(1,CRGB)*Variance;
Weights(mismatched(ii),index) = Props;
end
Weights = Weights./repmat(sum(Weights,2),1,K);
active_gaussian = Gaussian+replaced_gaussian;
% Background segmentation
[junk,index] = sort(Weights./sqrt(Sigmas(:,:,1)),2,'descend');
bg_gauss_good = index(:,1);
linear_index = (index-1)*D+repmat([1:D]',1,K);
weights_ordered = Weights(linear_index);
for kk = 1:K
Weight(:,kk)= sum(weights_ordered(:,1:kk),2);
end
bg_gauss(:,2:K) = Weight(:,1:(K-1)) < Back_Thresh;
bg_gauss(:,1) = 1;
bg_gauss(linear_index) = bg_gauss;
active_background_gaussian = active_gaussian & bg_gauss;
foreground_pixels = abs(sum(active_background_gaussian,2)-1);
foreground_map = reshape(sum(foreground_pixels,2),RR,CC);
Images1 = foreground_map;
objects_map = zeros(size(foreground_map),'int32');
object_sizes = [];
Obj_pos = [];
new_label = 1;
% Compute connected region
[label_map,num_labels] = bwlabel(foreground_map,8);
for label = 1:num_labels
object = (label_map == label);
object_size = sum(sum(object));
if(object_size >= Comp_Thresh)
objects_map = objects_map + int32(object * new_label);
object_sizes(new_label) = object_size;
[X,Y] = meshgrid(1:CC,1:RR);
object_x = X.*object;
object_y = Y.*object;
Obj_pos(:,new_label) = [sum(sum(object_x)) / object_size;
sum(sum(object_y)) / object_size];
new_label = new_label + 1;
end
end
num_objects = new_label - 1;
% Remove shadows
index = sub2ind(size(Mus),reshape(repmat([1:D],CRGB,1),D*CRGB,1),reshape(repmat(bg_gauss_good',CRGB,1),D*CRGB,1),repmat([1:CRGB]',D,1));
background = reshape(Mus(index),CRGB,D);
background = reshape(background',RR,CC,CRGB);
background = uint8(background);
if indxx <= 500;
background_Update = background;
else
background_Update = background_Update;
end
background_hsv = rgb2hsv(background);
image_hsv = rgb2hsv(pixel_original2);
for i = 1:RR
for j = 1:CC
if (objects_map(i,j))&&...
(abs(image_hsv(i,j,1)-background_hsv(i,j,1))<SHADOWS(1))&&...
(image_hsv(i,j,2)-background_hsv(i,j,2)<SHADOWS(2))&&...
(SHADOWS(3)<=image_hsv(i,j,3)/background_hsv(i,j,3)<=SHADOWS(4))
Shadows(i,j) = 1;
else
Shadows(i,j) = 0;
end
end
end
Images0 = objects_map;
objecs_adjust_map = Shadows;
Images2 = objecs_adjust_map;
%%
% According to the size proportion of the region where the pixel is located and the texture feature analysis, the human density is obtained
% Corrosion treatment
se = strel('ball',6,6);
Images2BW = floor(abs(imdilate(Images2,se)-5));
Images3BW = zeros(size(Images2BW));
X1 = round(168/2);
X2 = round(363/2);
Y1 = round(204/2);
Y2 = round(339/2);
if indxx > 80;
% Calculate the pixel value in the region
S1 = sum(sum(Images2BW(Y1:Y2,X1:X2)));
S2(indxx-80) = S1/((X2-X1)*(Y2-Y1));
end
Images3BW(Y1:Y2,X1:X2) = Images2BW(Y1:Y2,X1:X2);
Images3Brgb = pixel_original2(Y1:Y2,X1:X2,:);
% Texture detection
% Calculate texture
[A,B] = func_wenli(rgb2gray(Images3Brgb));
% Select energy Entropy as the basis of judgment
if indxx > 80;
F1(indxx-80) = A(1);
F2(indxx-80) = A(2);
F3(indxx-80) = A(3);
end
if indxx > 80;
load train_model.mat
P = [S2(indxx-80);F2(indxx-80)];
y = round(NET(P));
if y == 1
set(handles.text2,'String',' Low density ');
set(handles.text2,'ForegroundColor',[0 1 0]) ;
end
if y == 2
set(handles.text2,'String',' Medium density ');
set(handles.text2,'ForegroundColor',[1 1 0]) ;
end
if y == 3
set(handles.text2,'String',' high-density ');
set(handles.text2,'ForegroundColor',[1 0 0]) ;
end
end
axes(handles.axes1)
imshow(pixel_original2);
% title(' Locate the detection area ');
hold on
line([X1,X2],[Y1,Y1],'LineWidth',1,'Color',[0 1 0]);
hold on
line([X2,X2],[Y1,Y2],'LineWidth',1,'Color',[0 1 0]);
hold on
line([X2,X1],[Y2,Y2],'LineWidth',1,'Color',[0 1 0]);
hold on
line([X1,X1],[Y2,Y1],'LineWidth',1,'Color',[0 1 0]);
axes(handles.axes2)
imshow(uint8(background_Update));
% title(' Background gain ');
axes(handles.axes3)
imshow(Images0,[]);
% title(' Dynamic background extraction ');
axes(handles.axes4)
imshow(Images3BW,[]);
% title(' Dynamic background extraction ( Within the detection area )');
pause(0.0000001);
end
4. Simulation results

边栏推荐
猜你喜欢

蓝桥杯单片机省赛第八届

蓝桥杯单片机省赛第十二届第一场
![[golang] leetcode intermediate bracket generation & Full Permutation](/img/93/ca38d97c721ccba2505052ef917788.jpg)
[golang] leetcode intermediate bracket generation & Full Permutation

What do you know about stock selling skills and principles
The 5th Blue Bridge Cup single chip microcomputer provincial competition

汇率的查询接口

软件测试人的第一个实战项目:web端(视频教程+文档+用例库)

Large screen visualization from bronze to the advanced king, you only need a "component reuse"!

《MATLAB 神经网络43个案例分析》:第42章 并行运算与神经网络——基于CPU/GPU的并行神经网络运算
"Analysis of 43 cases of MATLAB neural network": Chapter 42 parallel operation and neural network - parallel neural network operation based on cpu/gpu
随机推荐
一文彻底理解评分卡开发中——Y的确定(Vintage分析、滚动率分析等)
Kotlin basic learning 16
高性能 低功耗Cortex-A53核心板 | i.MX8M Mini
[untitled] basic operation of raspberry pie (2)
h5中的页面显示隐藏执行事件
[mv-3d] - multi view 3D target detection network
The second game of the 12th provincial single chip microcomputer competition of the Blue Bridge Cup
5G时代全面到来,浅谈移动通信的前世今生
PY3, PIP appears when installing the library, warning: ignoring invalid distribution -ip
Homework in Chapter 3 of slam course of dark blue vision -- derivative application of T6 common functions
MySQL connection query and subquery
The 11th Blue Bridge Cup single chip microcomputer provincial competition
js生成随机数
蓝桥杯单片机第六届温度记录器
蓝桥杯单片机省赛第十届
知物由学 | 自监督学习助力内容风控效果提升
Welcome the winter vacation multi school league game 2 partial solution (B, C, D, F, G, H)
Global and Chinese market of handheld ultrasonic scanners 2022-2028: Research Report on technology, participants, trends, market size and share
接口调试工具模拟Post上传文件——ApiPost
Flutter中深入了解MaterialApp,常用属性解析