当前位置:网站首页>Visual slam Lecture 3 -- Lie groups and Lie Algebras
Visual slam Lecture 3 -- Lie groups and Lie Algebras
2022-07-02 03:39:00 【Reading fitness code】
0. Content

1. What is a group
Why introduce groups ?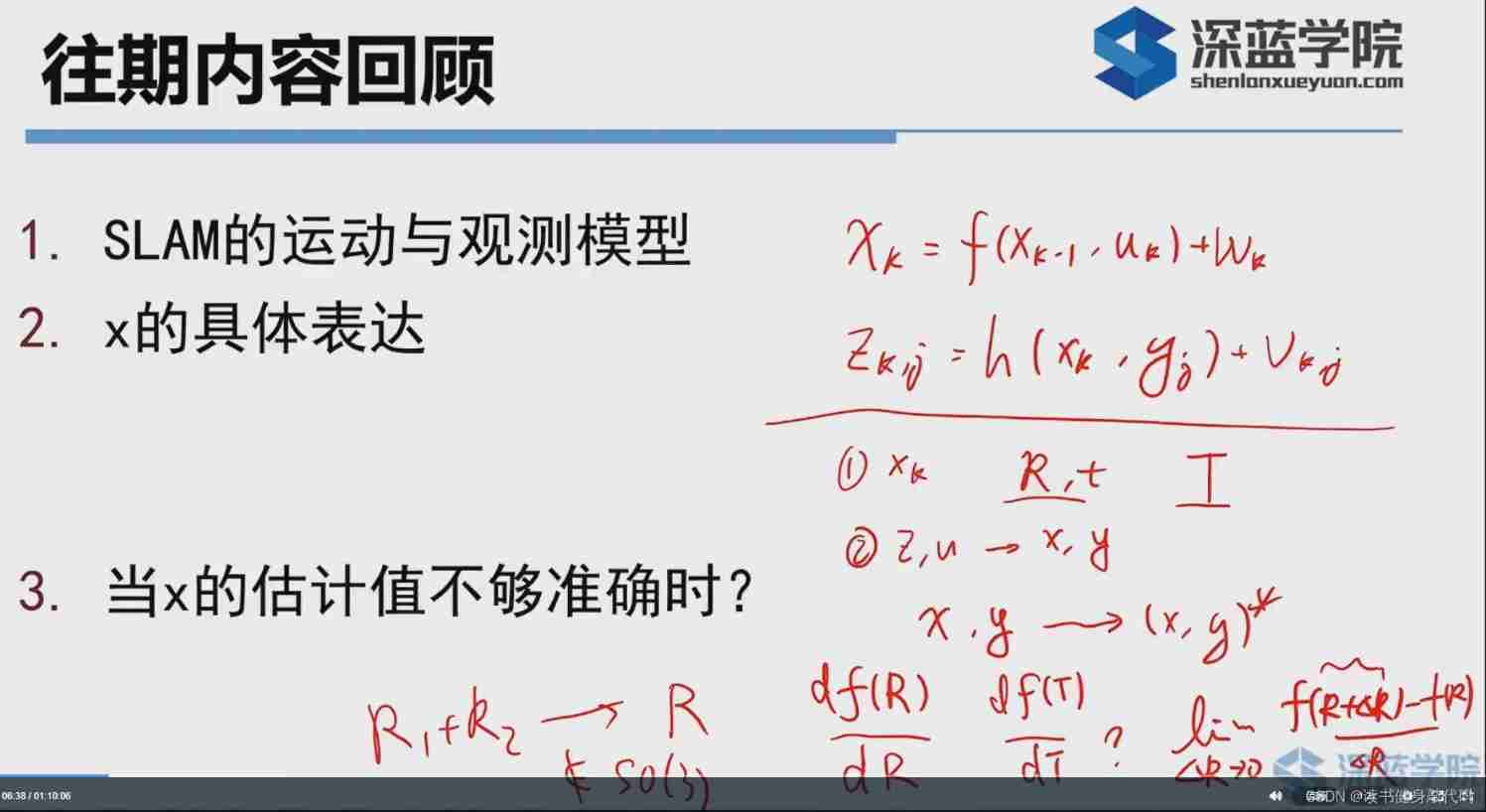
Because when calculating the derivative of rotation matrix or transformation matrix , Addition no longer holds , So finding the derivative of a matrix requires introducing other methods , So the group is introduced .
“ Group , Ring , Domain ” They are all things in abstract algebra 
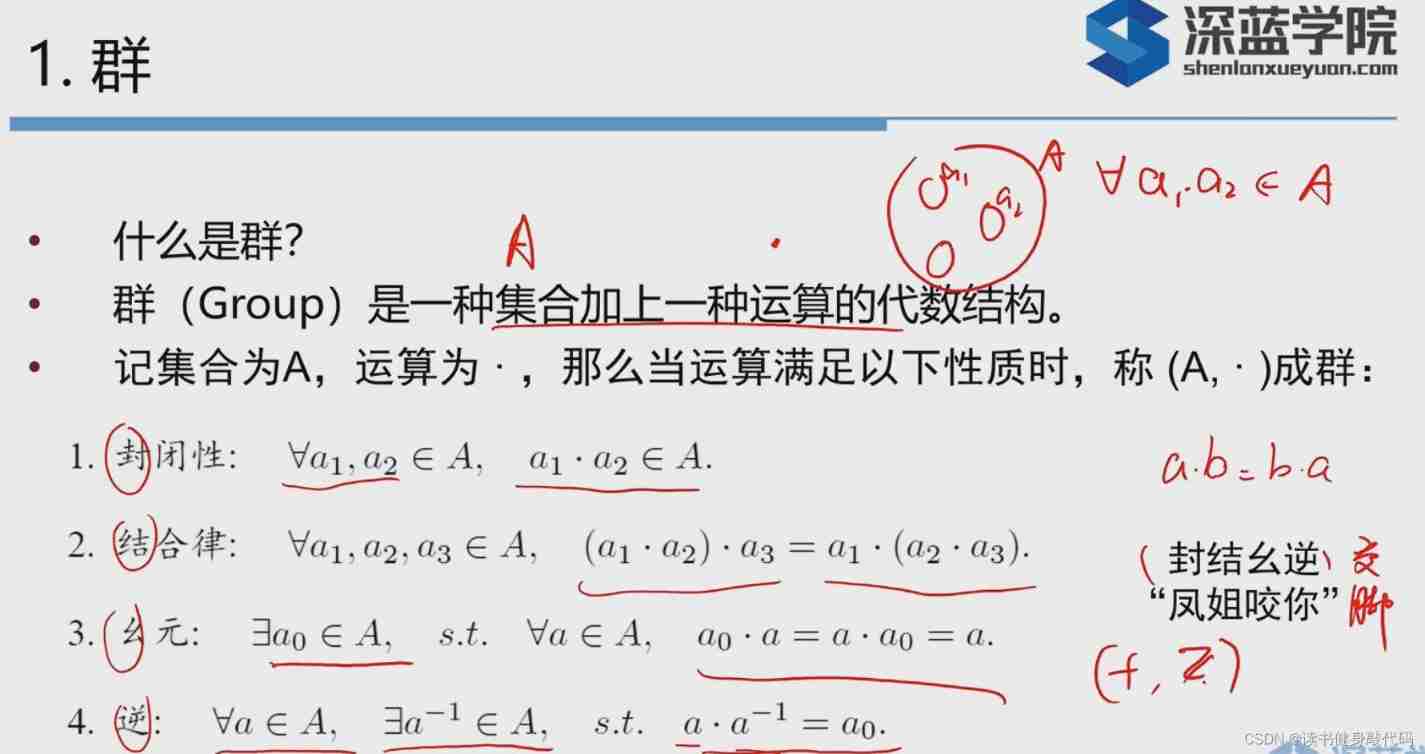
Because addition is a commutative group on integers , therefore 2+3=3+2=5
for example : Operations on addition , Univariate is 0,a+(-a)=0
In multiplication , Univariate is 1, a ∗ 1 a = 1 a* \dfrac{1}{a}=1 a∗a1=1
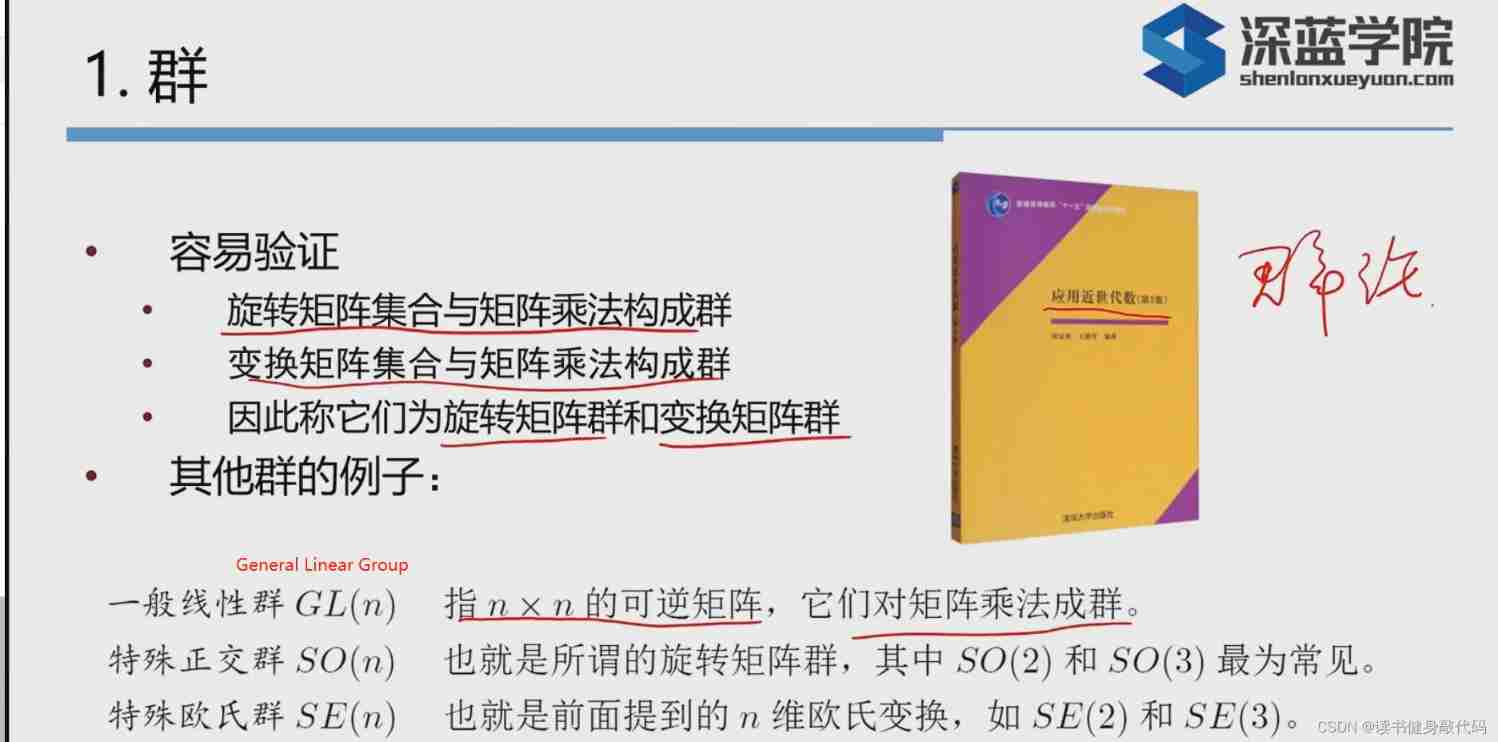
The rotation matrix is reversible , Is an orthogonal matrix , And matrix multiplication to form a group .
If not in groups , Basically, there is no need to discuss .
General n × n n\times n n×n The invertible matrix of is a general linear group GL(n)

Basic knowledge supplement :《 Abstract algebra 》,《 Differential geometry 》
2. Lie groups and Lie algebras

With continuous ( smooth ) A group of properties is called a lie group (Lie Group).
Basic knowledge supplement :《 Differential geometry 》
Definition of manifold ( I understand it ): A manifold is a space . Manifold is a space formed by mapping low dimensional data to high dimensions . Data in high-dimensional space will produce dimensional redundancy , But in fact, these data can be uniquely represented only by using lower dimensions . And the manifold learning I've heard before is : Suppose the data is a low dimensional manifold uniformly sampled in a high-dimensional Euclidean space , Manifold learning is to recover low dimensional manifold structure from high dimensional sampled data , And find low dimensional manifolds in high dimensional space , And find the corresponding embedding mapping , To achieve dimension reduction or data visualization . He is looking for the essence of things from the observed phenomena , The internal law of data generation has been found .
The following pictures are from Reference blog

SO(3) and SE(3) Only well-defined multiplication , No addition , So it is difficult to reach the limit of retrograde , Derivation and other operations .( It was said before that the group was introduced in order to find the derivative of the rotation matrix ? Why can't we ask here ?)

First of all SO(3)( Rotation matrix ) To introduce Lie algebra .
First, for the rotation matrix , It is orthogonal. , Derivation of time on both sides , After finishing, we get an antisymmetric matrix
R ˙ ( t ) R ( t ) T \dot{R}(t)R(t)^T R˙(t)R(t)T
a^ Represents from vector to antisymmetric matrix , and 
Denotes that the vector is represented by an antisymmetric matrix .

Can be regarded as right R(t) After derivation , One more on the left ϕ ( t ) \phi(t) ϕ(t)^
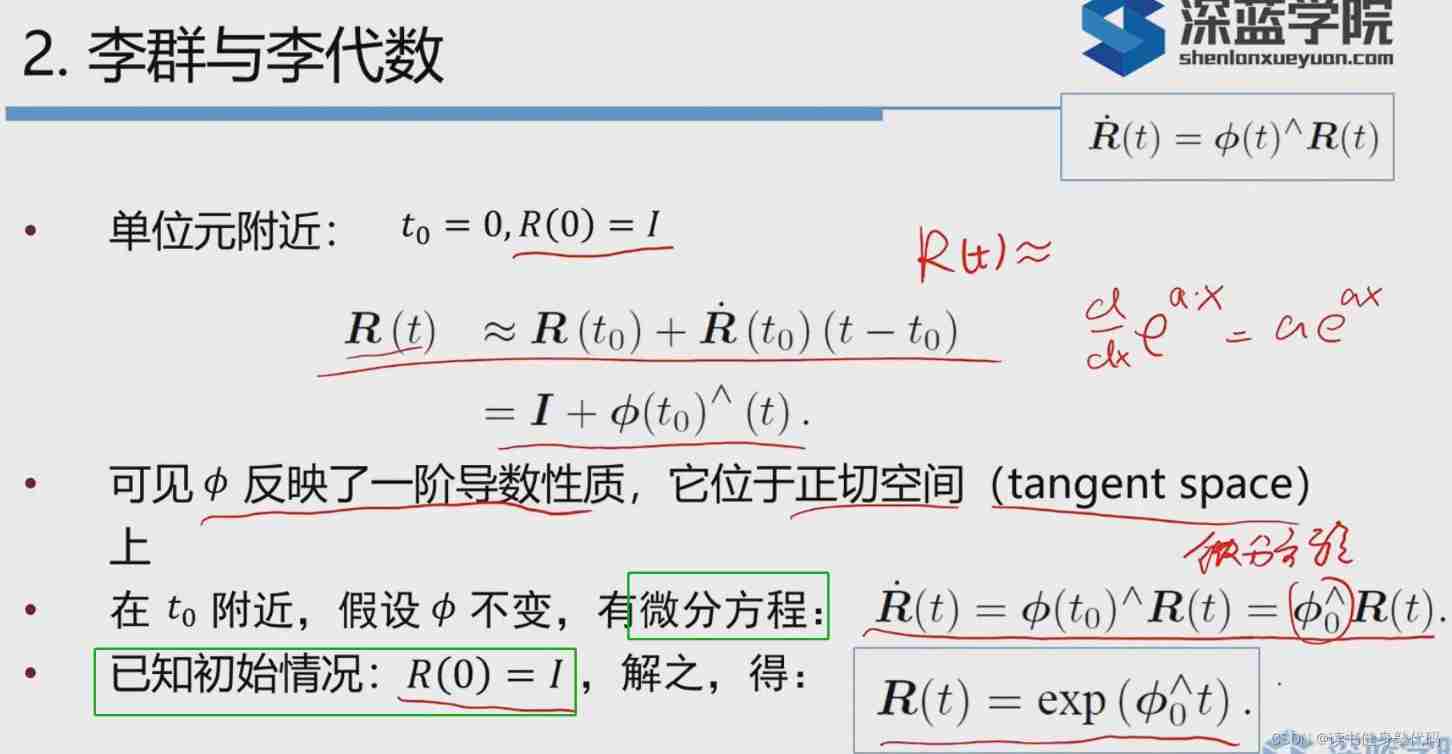
Yes R(t) First order Taylor expansion , stay t 0 t_0 t0 near ϕ \phi ϕ unchanged , Into differential equations , Bring in the initial condition solution ( There are some details that have not been discussed carefully )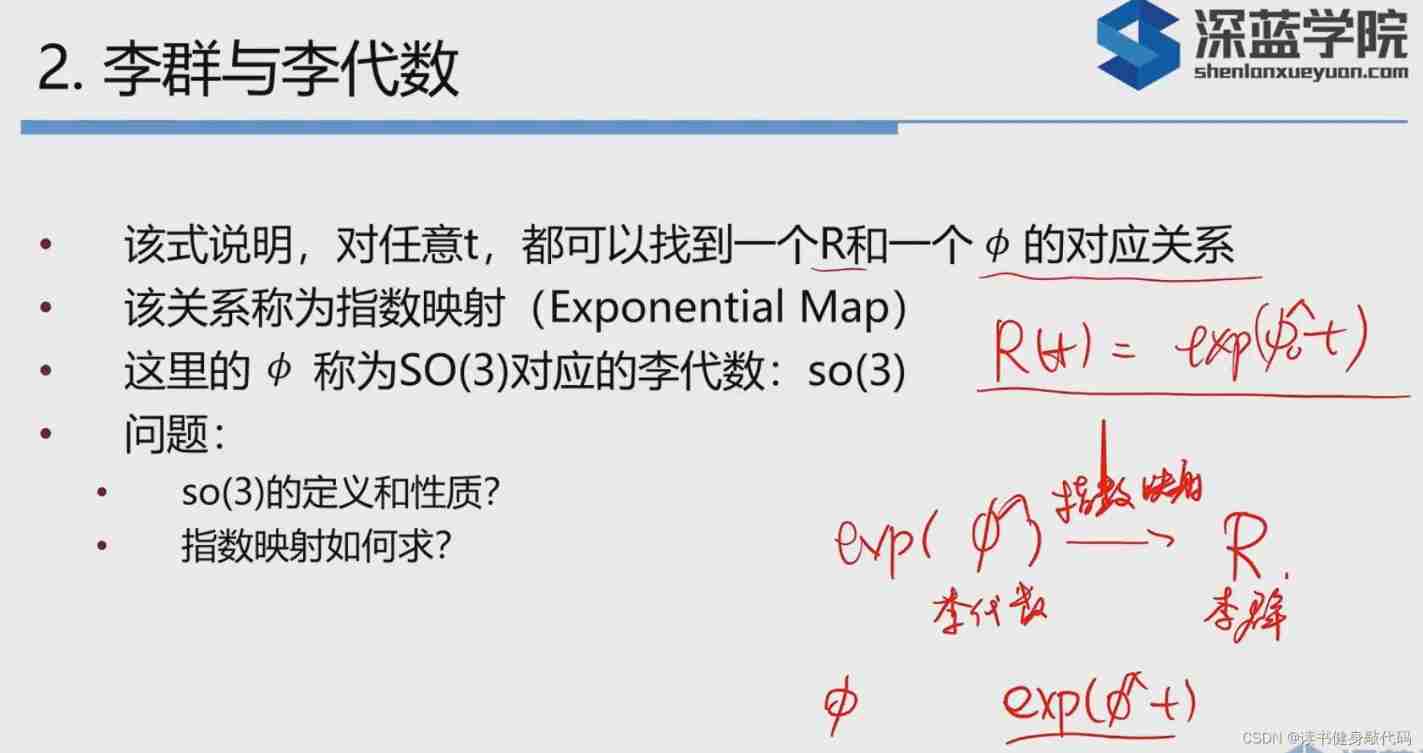
Any given vector ϕ \phi ϕ, Can find a corresponding relationship ,
e ϕ ^ 0 t = R ( t ) e^{\hat\phi_0 t}=R(t) eϕ^0t=R(t)
among ϕ \phi ϕ It's lie algebra , The correspondence is exponential mapping , R R R It's Li Qun .
The following is a strict definition of Lie algebra :
Given the structure, we can check whether it is a lie algebra .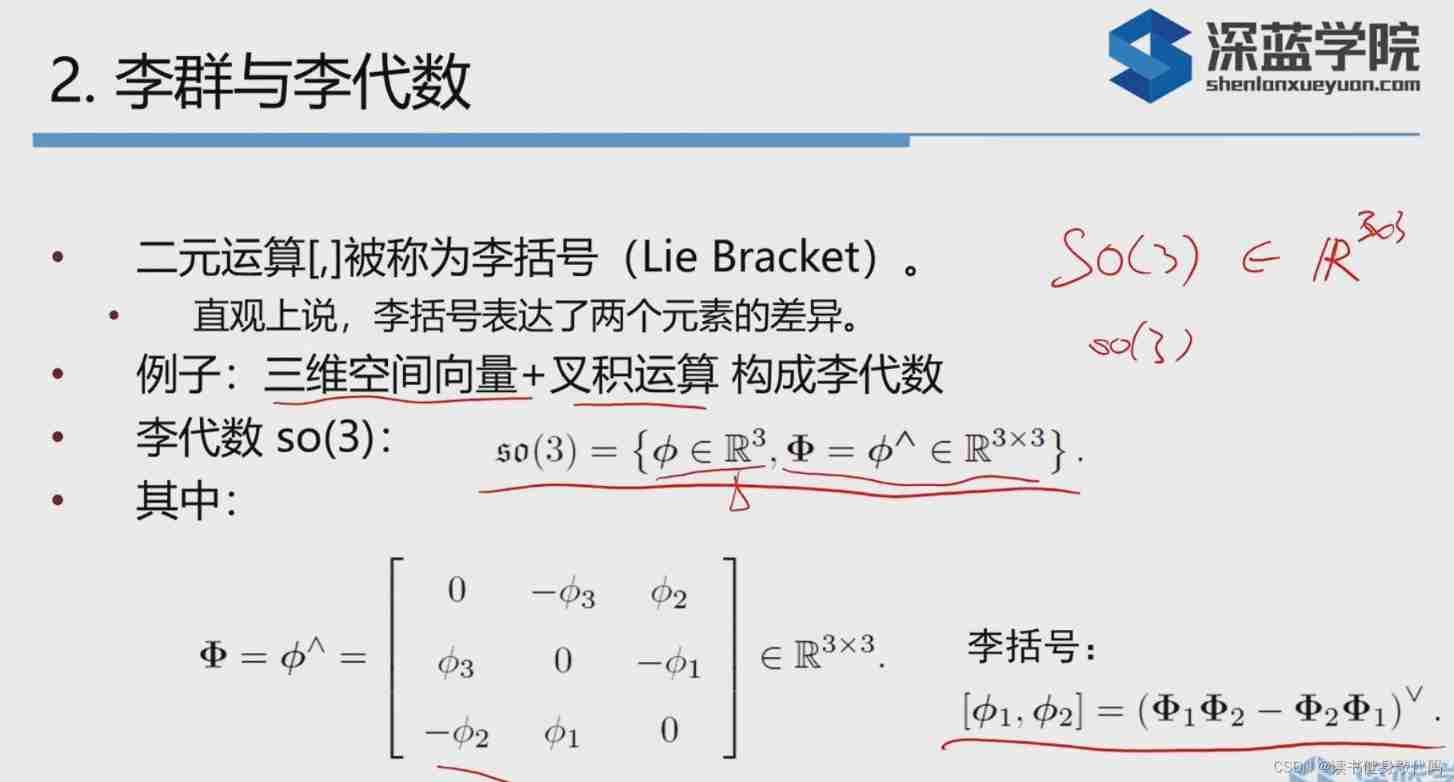
[,] It's a lie bracket operation .
SO(3) It's a matrix ,so(3) It's a vector ( In fact, matrix and vector correspond one by one , Fine , But this is more natural ), Lie brackets are operations that act on vectors .

SE(3) The lie algebra of is 6 Dimension vector , ρ \rho ρ Represents translation , ϕ \phi ϕ For rotation , And the top tip ^ No longer represent a symmetric matrix , But still retain the notation . Just put the rotating part ϕ \phi ϕ Do antisymmetry , The translation part remains unchanged , from (6,1)->(4,4)

3. Exponential mapping and logarithmic mapping
Taylor expansion 

Expand by infinite series ( See high number 18 speak P244)
e x = ∑ n = 0 ∞ x n n ! e^x=\sum_{n=0}^\infty \frac{x^n}{n!} ex=n=0∑∞n!xn
sin x = ∑ n = 0 ∞ ( − 1 ) n x 2 n + 1 ( 2 n + 1 ) ! \sin x=\sum_{n=0}^\infty (-1)^n\frac{x^{2n+1}}{(2n+1)!} sinx=n=0∑∞(−1)n(2n+1)!x2n+1
cos x = ∑ n = 0 ∞ ( − 1 ) n x 2 n ( 2 n ) ! \cos x=\sum_{n=0}^\infty (-1)^n\frac{x^{2n}}{(2n)!} cosx=n=0∑∞(−1)n(2n)!x2n
among 3 The expansions converge to − ∞ < x < + ∞ -\infty<x<+\infty −∞<x<+∞
Add the following properties to deal with higher powers 
You can deduce Rodriguez formula .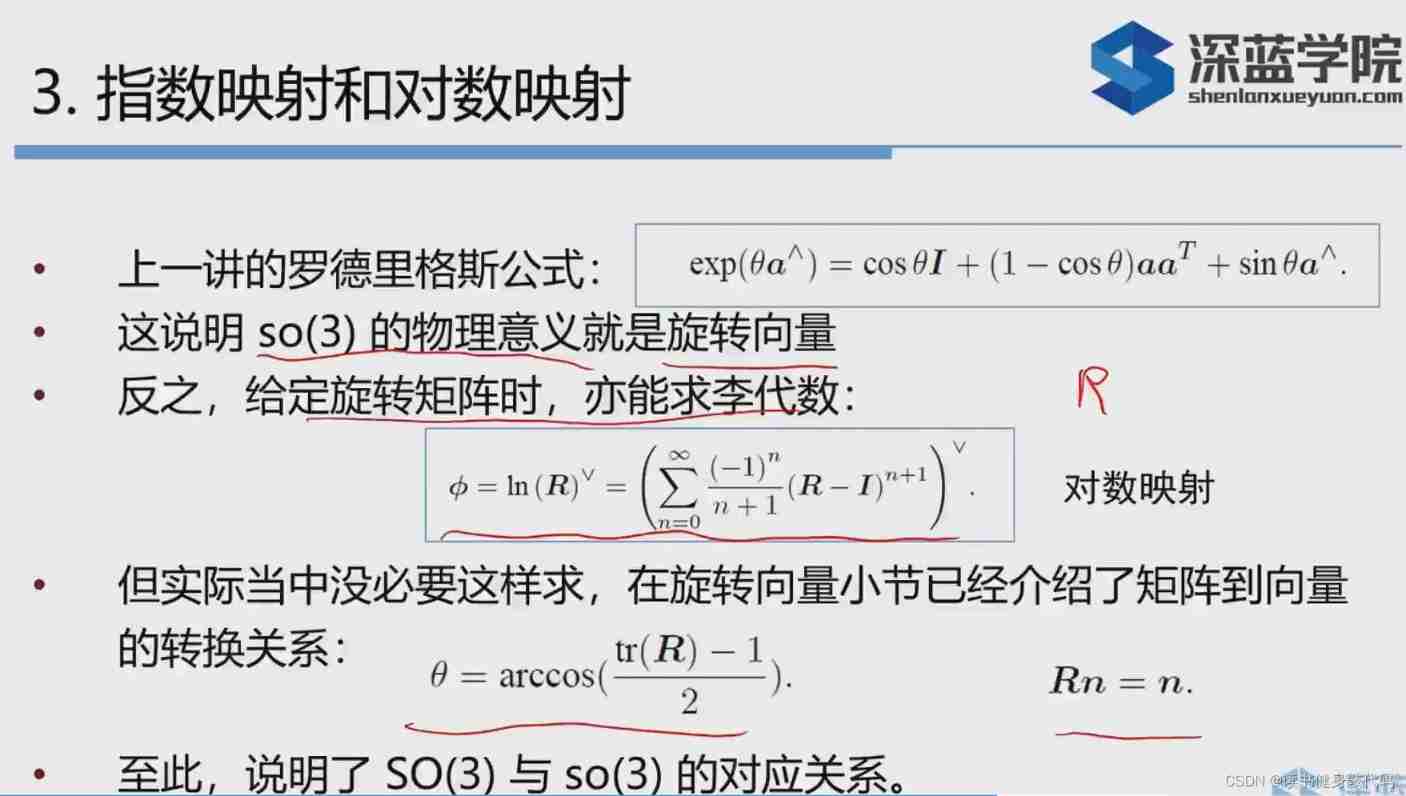
Then explain Lie algebra so(3) The physical meaning of is actually rotation vector ( Rodrigues formula is rotation vector to rotation matrix , On the left is the rotation matrix R R R). conversely , Given the rotation matrix, the rotation vector can be obtained , You can use logarithmic mapping or the following transformation relationship :
about SE(3)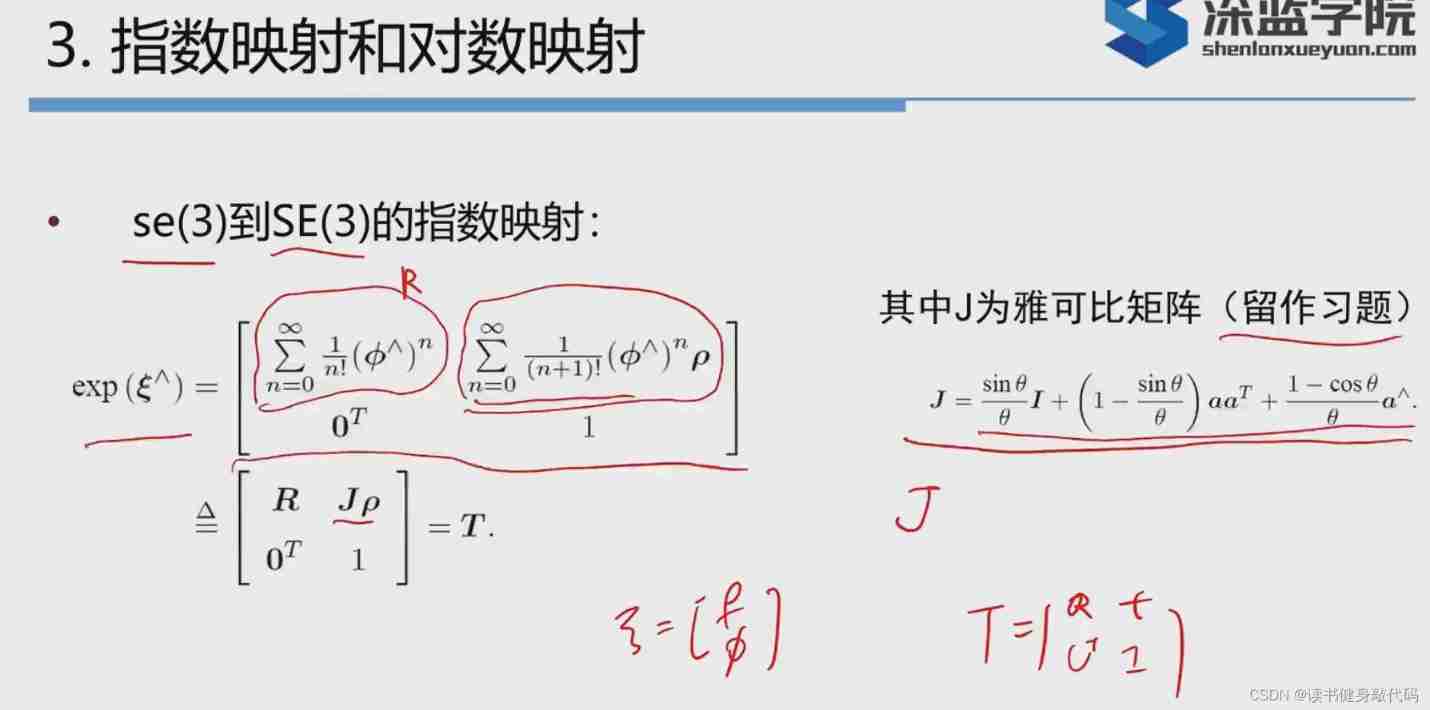
Where the translation vector ρ \rho ρ And the translation in the transformation matrix t t t A coefficient matrix is missing , That is Jacobian matrix , It's related to the angle , The rotating part is just a so(3).
This part summarizes

Li Qun –> Exponential mapping –> Lie algebra
Lie algebra –> Logarithmic mapping –> Li Qun
4. Derivation and perturbation model
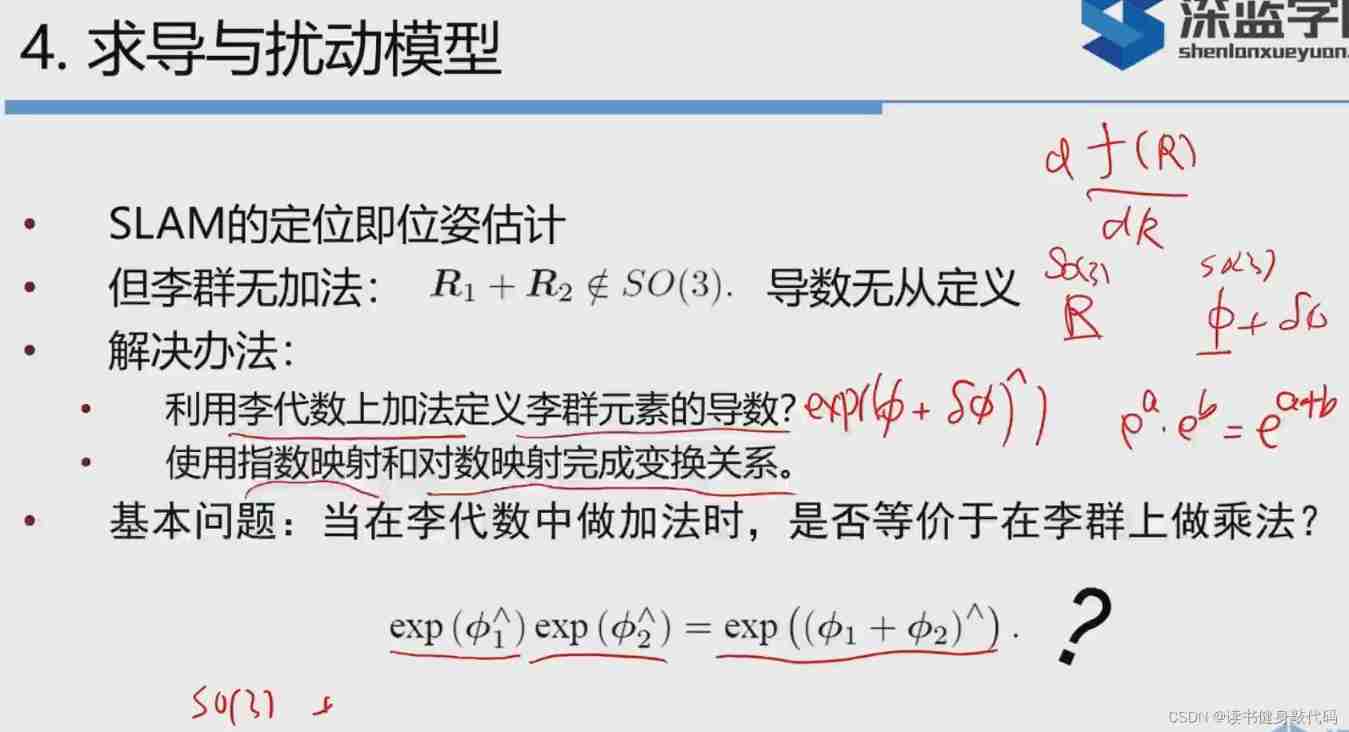
Or derivation , Because lie groups have no addition , Therefore, the derivation is required to start from the perspective of Lie algebra , Add a small quantity to lie algebra δ ϕ \delta \phi δϕ Then it is transformed into Lie group by exponential operation , But the question is whether addition in Lie algebra is equivalent to multiplication of Lie groups . It is obviously true in scalar ,a,b It is obviously true when it is scalar e a ∗ e b = e a + b e^a*e^b=e^{a+b} ea∗eb=ea+b, But it doesn't hold when the power is a matrix .
introduce BCH The formula :
Matrix two exp And then take ln Expansion is a formula about lie brackets , Quite complicated , After some approximation :
When one of the two matrices is a small quantity , Gu slightly makes the following approximation in higher order :
When multiplying left by a small quantity , The coefficient is the left Jacobian matrix ; When multiplying left by right by a small amount , The coefficient is the right Jacobian matrix , It is often compared with Zuo Ya .
So when adding small quantities on Lie algebra , Equivalent to the upper left of the Group ( Right ) Multiply by a quantity with Jacobi .
SE(3) Than SO(3) complex , In the top right corner of the Q r Q_r Qr Very complicated .
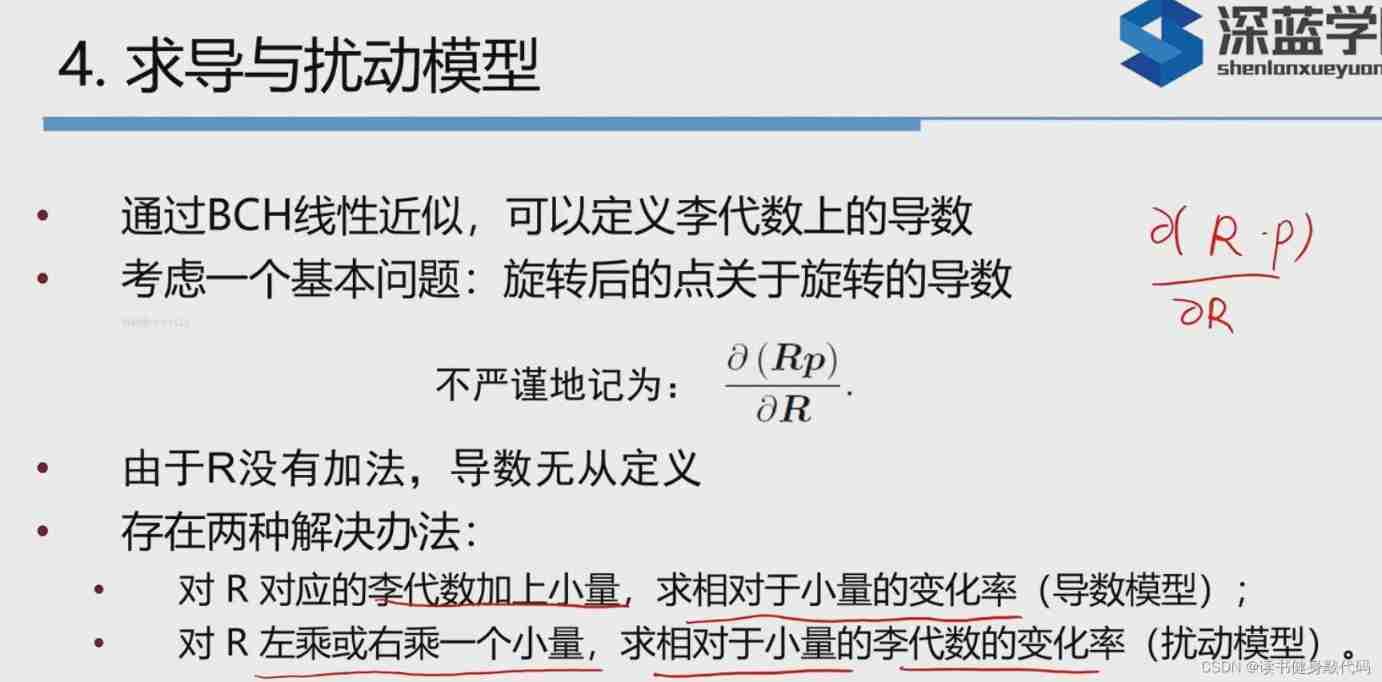
There are two ways to find derivatives :
- Add a small quantity to lie algebra , Find the rate of change
- Liqun is superior to a small quantity , Find the rate of change relative to lie algebra
Derivative model :
Reverse use BCH The formula , Then Taylor expands , The quadratic term is 0 了 , So Taylor expansion only retains the first two .
Disturbance model , Left ( Right ) Multiply the group corresponding to a disturbance 
SE(3) Perturbation model : Left multiply perturbation 
5. Sophus practice
边栏推荐
- UI (New ui:: MainWindow) troubleshooting
- The 10th Blue Bridge Cup single chip microcomputer provincial competition
- The first game of the 11th provincial single chip microcomputer competition of the Blue Bridge Cup
- 蓝桥杯单片机第四届省赛
- Unity脚本的基础语法(6)-特定文件夹
- Object oriented thinking
- Oracle viewing locked tables and unlocking
- Oracle 常用SQL
- 蓝桥杯单片机省赛第十一届
- aaaaaaaaaaaaa
猜你喜欢
![[HCIA continuous update] working principle of OSPF Protocol](/img/bc/4eeb091c511fd563fb1e00c8c8881a.jpg)
[HCIA continuous update] working principle of OSPF Protocol

MySQL connection query and subquery
"Analysis of 43 cases of MATLAB neural network": Chapter 41 implementation of customized neural network -- personalized modeling and Simulation of neural network

Uniapp uses canvas to generate posters and save them locally
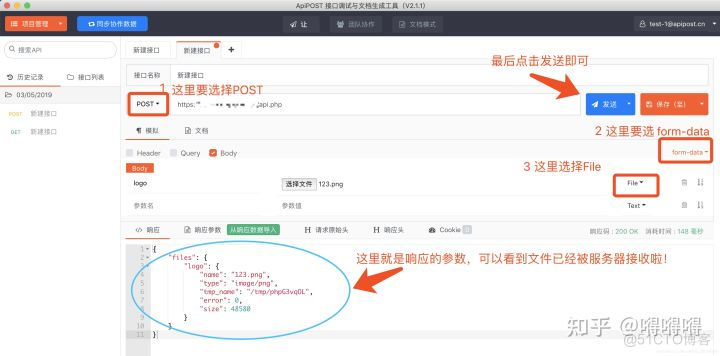
Interface debugging tool simulates post upload file - apipost

JIT deep analysis

Large screen visualization from bronze to the advanced king, you only need a "component reuse"!
![[HCIA continuous update] overview of dynamic routing protocol](/img/03/83c883afb63b7c63f6879b5513bac3.jpg)
[HCIA continuous update] overview of dynamic routing protocol
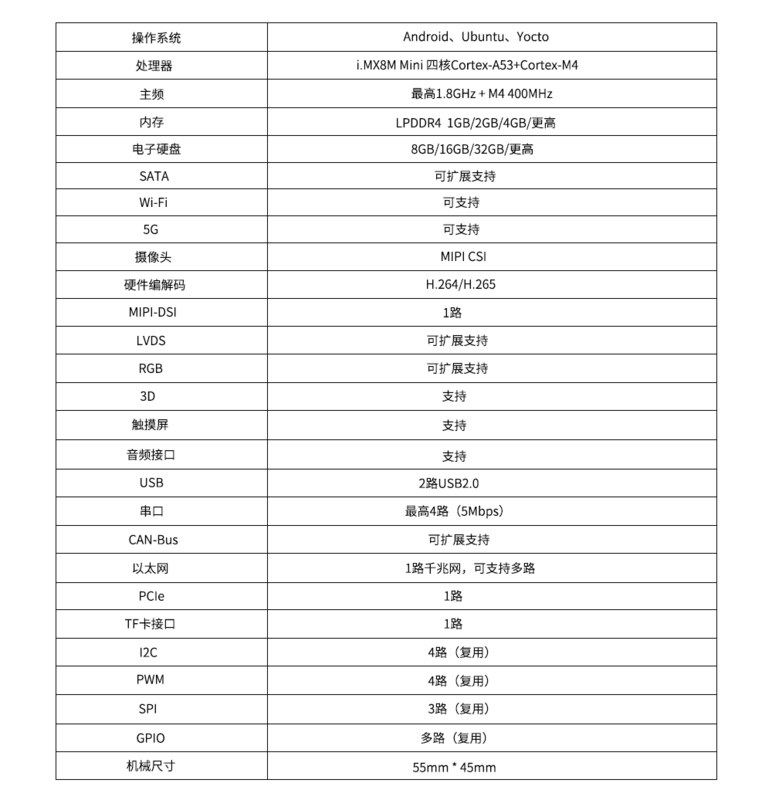
高性能 低功耗Cortex-A53核心板 | i.MX8M Mini
The 10th Blue Bridge Cup single chip microcomputer provincial competition
随机推荐
[golang] leetcode intermediate bracket generation & Full Permutation
How to do medium and long-term stocks, and what are the medium and long-term stock trading skills?
How about Ping An lifetime cancer insurance?
蓝桥杯单片机省赛第五届
The fourth provincial competition of Bluebridge cup single chip microcomputer
高性能 低功耗Cortex-A53核心板 | i.MX8M Mini
< job search> process and signal
Generate random numbers that obey normal distribution
Merge interval, linked list, array
Kotlin基础学习 14
u本位合约爆仓清算解决方案建议
焱融看 | 混合云时代下,如何制定多云策略
蓝桥杯单片机第四届省赛
Basic syntax of unity script (8) - collaborative program and destruction method
aaaaaaaaaaaaa
潘多拉 IOT 开发板学习(RT-Thread)—— 实验1 LED 闪烁实验(学习笔记)
How to establish its own NFT market platform in 2022
Global and Chinese market of autotransfusion bags 2022-2028: Research Report on technology, participants, trends, market size and share
The 8th Blue Bridge Cup single chip microcomputer provincial competition
PY3, PIP appears when installing the library, warning: ignoring invalid distribution -ip