当前位置:网站首页>The 8th Blue Bridge Cup single chip microcomputer provincial competition
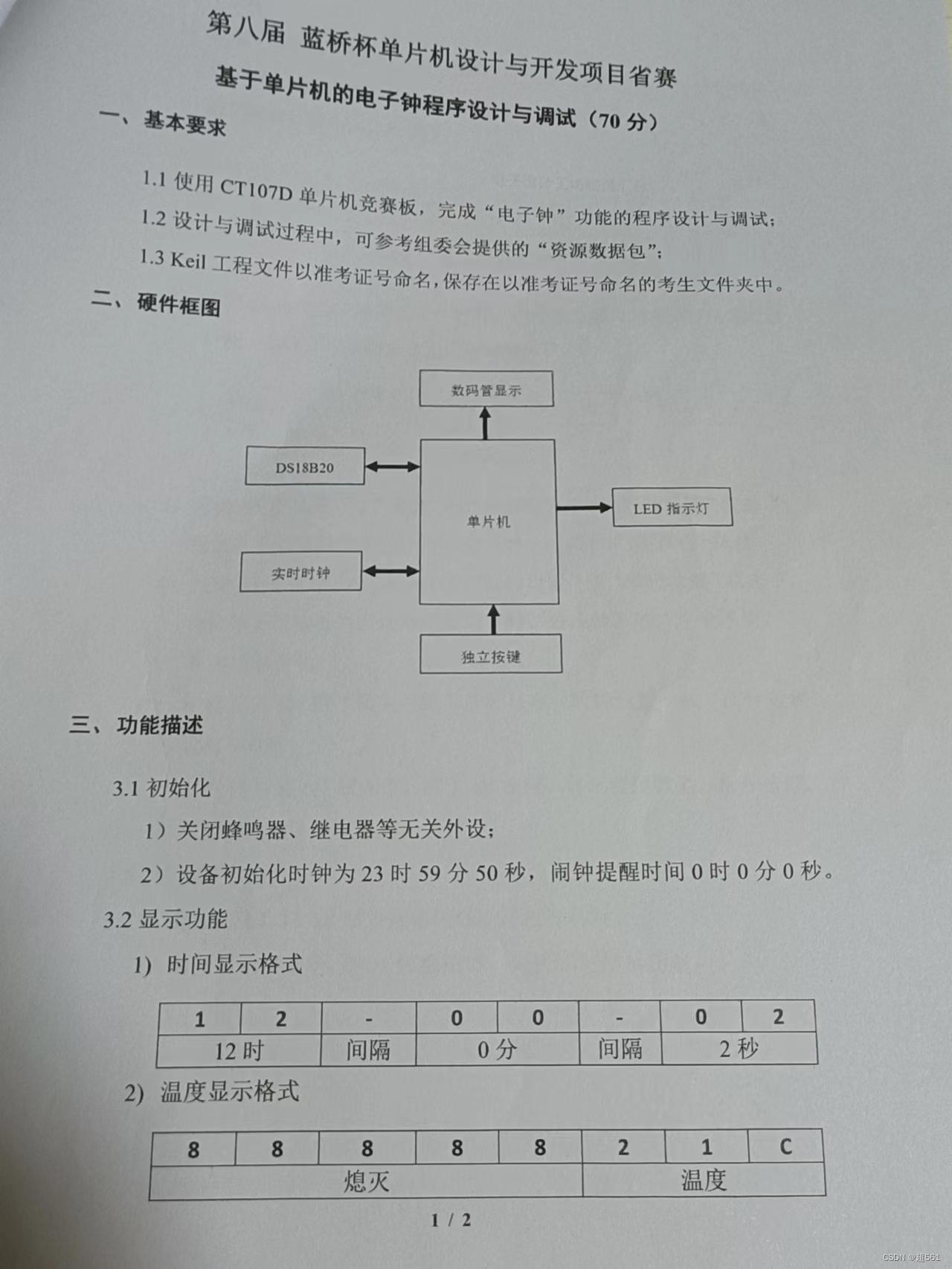
The 8th Blue Bridge Cup single chip microcomputer provincial competition
2022-07-02 03:38:00 【Super 561】

main,c
#include <STC15F2K60S2.H>
#include <DS1302.H>
#include <ONEWIRE.H>
void Timer2Init() //1 millisecond @12.000MHz
{
AUXR &= 0xFB; // Timer clock 12T Pattern
T2L = 0x18; // Set initial value of timing
T2H = 0xFC; // Set initial value of timing
AUXR |= 0x10; // Timer 2 Start timing
IE2|=0X04;
EA=1;
}
void Device_ctrl(unsigned char p2date,unsigned char p0date)
{
P0=p0date;
P2=P2&0X1F|p2date;
P2&=0x1f;
}
unsigned char time_display[8];
unsigned char alarmtime_display[8];
unsigned char settime_display[8];
unsigned char temp_display[8];
unsigned char smg_du[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};
unsigned char smg_count;
unsigned char display_mode;
unsigned char shi,fen,miao;
unsigned char setshi,setfen,setmiao;
unsigned char alarmshi=0,alarmfen=0,alarmmiao=0;
unsigned int time_count;
unsigned char key_press;
unsigned int led_count;
unsigned int led_blink_count;
unsigned int temp;
unsigned int temp_count;
bit led_flag;
bit smg_flag;
float read_temp()
{
float date;
unsigned char low,high;
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0x44);
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0xbe);
low=Read_DS18B20();
high=Read_DS18B20();
date=(high<<8)|low;
date=date*0.0625;
return date;
}
void temp_process()
{
if(temp_count>100)
{
temp_count=0;
temp=read_temp();
}
}
void set_sfm(unsigned char shi,unsigned char fen,unsigned char miao)
{
Write_Ds1302_Byte(0x8e ,0);
Write_Ds1302_Byte(0x80,miao/10*16+miao%10);
Write_Ds1302_Byte(0x82,fen/10*16+fen%10);
Write_Ds1302_Byte(0x84,shi/10*16+shi%10);
Write_Ds1302_Byte(0x8e,0x80);
}
void smg_show()
{
unsigned char i;
Device_ctrl(0xc0,0);
if(display_mode==0)
{
Device_ctrl(0xe0,~time_display[i]);
}
if(display_mode==1)
{
Device_ctrl(0xe0,~settime_display[i]);
}
if(display_mode==2)
{
Device_ctrl(0xe0,~alarmtime_display[i]);
}
if(display_mode==3)
{
Device_ctrl(0xe0,~temp_display[i]);
}
Device_ctrl(0xc0,0x01<<i);
i=(i+1)%8;
}
void smg_process()
{
EA=0;
shi=Read_Ds1302_Byte(0x85);
fen=Read_Ds1302_Byte(0x83);
miao=Read_Ds1302_Byte(0x81);
shi=shi/16*10+shi%16;
fen=fen/16*10+fen%16;
miao=miao/16*10+miao%16;
EA=1;
if((shi==alarmshi)&&(fen==alarmfen)&&(miao==alarmmiao))
{led_flag=1;}
time_display[2]=0x40;
time_display[5]=0x40;
settime_display[2]=0x40;
settime_display[5]=0x40;
alarmtime_display[2]=0x40;
alarmtime_display[5]=0x40;
temp_display[0]=0x00;
temp_display[1]=0x00;
temp_display[2]=0x00;
temp_display[3]=0x00;
temp_display[4]=0x00;
temp_display[7]=0x39;
if(smg_count>3)
{
smg_count=0;
if(display_mode==0)// Time display interface
{
time_display[0]=smg_du[shi/10];
time_display[1]=smg_du[shi%10];
time_display[3]=smg_du[fen/10];
time_display[4]=smg_du[fen%10];
time_display[6]=smg_du[miao/10];
time_display[7]=smg_du[miao%10];
}
if(display_mode==1)// Time setting interface
{
if(key_press==1)
{
if(smg_flag)
{
settime_display[0]=smg_du[setshi/10];
settime_display[1]=smg_du[setshi%10];
}
else
{
settime_display[0]=0x00;
settime_display[1]=0x00;
}
settime_display[3]=smg_du[setfen/10];
settime_display[4]=smg_du[setfen%10];
settime_display[6]=smg_du[setmiao/10];
settime_display[7]=smg_du[setmiao%10];
}
if(key_press==2)
{
if(smg_flag)
{
settime_display[3]=smg_du[setfen/10];
settime_display[4]=smg_du[setfen%10];
}
else
{
settime_display[3]=0x00;
settime_display[4]=0x00;
}
settime_display[6]=smg_du[setmiao/10];
settime_display[7]=smg_du[setmiao%10];
settime_display[0]=smg_du[setshi/10];
settime_display[1]=smg_du[setshi%10];
}
if(key_press==3)
{
if(smg_flag)
{
settime_display[6]=smg_du[setmiao/10];
settime_display[7]=smg_du[setmiao%10];
}
else
{
settime_display[6]=0x00;
settime_display[7]=0x00;
}
settime_display[0]=smg_du[setshi/10];
settime_display[1]=smg_du[setshi%10];
settime_display[3]=smg_du[setfen/10];
settime_display[4]=smg_du[setfen%10];
}
}
if(display_mode==2)// Alarm clock setting interface
{
if(key_press==1)
{
if(smg_flag)
{
alarmtime_display[0]=smg_du[alarmshi/10];
alarmtime_display[1]=smg_du[alarmshi%10];
}
else
{
alarmtime_display[0]=0x00;
alarmtime_display[1]=0x00;
}
alarmtime_display[3]=smg_du[alarmfen/10];
alarmtime_display[4]=smg_du[alarmfen%10];
alarmtime_display[6]=smg_du[alarmmiao/10];
alarmtime_display[7]=smg_du[alarmmiao%10];
}
if(key_press==2)
{
if(smg_flag)
{
alarmtime_display[3]=smg_du[alarmfen/10];
alarmtime_display[4]=smg_du[alarmfen%10];
}
else
{
alarmtime_display[3]=0x00;
alarmtime_display[4]=0x00;
}
alarmtime_display[6]=smg_du[alarmmiao/10];
alarmtime_display[7]=smg_du[alarmmiao%10];
alarmtime_display[0]=smg_du[alarmshi/10];
alarmtime_display[1]=smg_du[alarmshi%10];
}
if(key_press==3)
{
if(smg_flag)
{
alarmtime_display[6]=smg_du[alarmmiao/10];
alarmtime_display[7]=smg_du[alarmmiao%10];
}
else
{
alarmtime_display[6]=0x00;
alarmtime_display[7]=0x00;
}
alarmtime_display[0]=smg_du[alarmshi/10];
alarmtime_display[1]=smg_du[alarmshi%10];
alarmtime_display[3]=smg_du[alarmfen/10];
alarmtime_display[4]=smg_du[alarmfen%10];
}
}
if(display_mode==3)
{
temp_display[5]=smg_du[temp/10];
temp_display[6]=smg_du[temp%10];
}
}
}
unsigned char Trig_btn;
unsigned char Cont_btn;
unsigned int key_count;
void key_btn()
{
unsigned char readdate=P3^0XFF;
Trig_btn=readdate&(Cont_btn^readdate);
Cont_btn=readdate;
}
void key_process()
{
if(key_count>10)
{
key_count=0;
key_btn();
if(Trig_btn==0x08)//s4
{
if(display_mode==0)
{
display_mode=3;
}
if(display_mode==1)// Set the time
{
if(key_press==1)
{
if(setshi>0)
{
setshi--;
}
}
if(key_press==2)
{
if(setfen>0)
{
setfen--;
}
}
if(key_press==3)
{
if(setmiao>0)
{
setmiao--;
}
}
}
if(display_mode==2)// Alarm time setting
{
if(key_press==1)
{
if(alarmshi>0)
{
alarmshi--;
}
}
if(key_press==2)
{
if(alarmfen>0)
{
alarmfen--;
}
}
if(key_press==3)
{
if(alarmmiao>0)
{
alarmmiao--;
}
}
}
led_flag=0;
led_blink_count=0;
}
if(Trig_btn==0x04)//s5
{
if(display_mode==1)// Set the time
{
if(key_press==1)
{
if(setshi<23)
{
setshi++;
}
}
if(key_press==2)
{
if(setfen<59)
{
setfen++;
}
}
if(key_press==3)
{
if(setmiao<59)
{
setmiao++;
}
}
}
if(display_mode==2)// Alarm time setting
{
if(key_press==1)
{
if(alarmshi<23)
{
alarmshi++;
}
}
if(key_press==2)
{
if(alarmfen<59)
{
alarmfen++;
}
}
if(key_press==3)
{
if(alarmmiao<59)
{
alarmmiao++;
}
}
}
led_flag=0;
led_blink_count=0;
}
if(Trig_btn==0x02)//s6
{
display_mode=2;
if(display_mode==2)
{
key_press++;
if(key_press==4)
{
display_mode=0;
key_press=0;
}
}
led_flag=0;
led_blink_count=0;
}
if(Trig_btn==0x01)//s7
{
display_mode=1;
if(display_mode==1)
{
key_press++;
}
if(key_press==4)
{
display_mode=0;
set_sfm(setshi,setfen,setmiao);
key_press=0;
}
led_flag=0;
led_blink_count=0;
}
if(Trig_btn==0&Cont_btn==0)
{
if(display_mode==3)
{
display_mode=0;
}
}
}
}
void led_process()
{
if(led_flag)
{
led_count++;
if(led_count<200)
{Device_ctrl(0x80,~0x01);}
else
{
if(led_count<400)
{
Device_ctrl(0x80,0xff);
}
else
{
led_count=0;
led_blink_count++;
if(led_blink_count==12)
{
led_flag=0;
led_blink_count=0;
}
}
}
}
else
{
Device_ctrl(0x80,0xff);
}
}
void main()
{
Timer2Init();
set_sfm(23,59,50);
Device_ctrl(0xa0,0x00);
while(1)
{
smg_process();
key_process();
temp_process();
}
}
void timer2service() interrupt 12
{
smg_count++;
key_count++;
temp_count++;
smg_show();
if(display_mode==1)
{
time_count++;
if(time_count==1000)
{
smg_flag=~smg_flag;
time_count=0;
}
}
if(display_mode==2)
{
time_count++;
if(time_count==1000)
{
smg_flag=~smg_flag;
time_count=0;
}
}
led_process();
}ds1302.c
#include "ds1302.h"
// Write Bytes
void Write_Ds1302(unsigned char temp)
{
unsigned char i;
for (i=0;i<8;i++)
{
SCK = 0;
SDA = temp&0x01;
temp>>=1;
SCK=1;
}
}
// towards DS1302 Registers write data
void Write_Ds1302_Byte( unsigned char address,unsigned char dat )
{
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
Write_Ds1302(dat);
RST=0;
}
// from DS1302 Register reads data
unsigned char Read_Ds1302_Byte ( unsigned char address )
{
unsigned char i,temp=0x00;
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
for (i=0;i<8;i++)
{
SCK=0;
temp>>=1;
if(SDA)
temp|=0x80;
SCK=1;
}
RST=0; _nop_();
SCK=0; _nop_();
SCK=1; _nop_();
SDA=0; _nop_();
SDA=1; _nop_();
return (temp);
}
ds1302.h
#ifndef __DS1302_H
#define __DS1302_H
#include <STC15F2K60S2.H>
#include <intrins.h>
sbit SCK = P1^7;
sbit SDA = P2^3;
sbit RST = P1^3;
void Write_Ds1302(unsigned char temp);
void Write_Ds1302_Byte( unsigned char address,unsigned char dat );
unsigned char Read_Ds1302_Byte( unsigned char address );
#endif
onewire.c
#include "onewire.h"
// Single bus internal delay function
void Delay_OneWire(unsigned int t)
{
t=t*12;
while(t--);
}
// Single bus write operation
void Write_DS18B20(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = dat&0x01;
Delay_OneWire(5);
DQ = 1;
dat >>= 1;
}
Delay_OneWire(5);
}
// Single bus read operation
unsigned char Read_DS18B20(void)
{
unsigned char i;
unsigned char dat;
for(i=0;i<8;i++)
{
DQ = 0;
dat >>= 1;
DQ = 1;
if(DQ)
{
dat |= 0x80;
}
Delay_OneWire(5);
}
return dat;
}
//DS18B20 initialization
bit init_ds18b20(void)
{
bit initflag = 0;
DQ = 1;
Delay_OneWire(12);
DQ = 0;
Delay_OneWire(80);
DQ = 1;
Delay_OneWire(10);
initflag = DQ;
Delay_OneWire(5);
return initflag;
}
onewire.h
#ifndef __ONEWIRE_H
#define __ONEWIRE_H
#include <STC15F2K60S2.H>
sbit DQ = P1^4;
void Delay_OneWire(unsigned int t);
void Write_DS18B20(unsigned char dat);
unsigned char Read_DS18B20(void);
bit init_ds18b20(void);
#endif边栏推荐
- MySQL之账号管理
- Network connection mode of QT
- Spark Tuning
- [designmode] Prototype Pattern
- Load different fonts in QML
- Global and Chinese markets for hand hygiene monitoring systems 2022-2028: Research Report on technology, participants, trends, market size and share
- 0基础如何学习自动化测试?按照这7步一步一步来学习就成功了
- Basic syntax of unity script (8) - collaborative program and destruction method
- Xlwings drawing
- 数据库文件逻辑结构形式指的是什么
猜你喜欢
PY3, PIP appears when installing the library, warning: ignoring invalid distribution -ip
halcon图像矫正
Didi open source Delta: AI developers can easily train natural language models
![[yolo3d]: real time detection of end-to-end 3D point cloud input](/img/5e/f17960d302f663db75ad82ae0fd70f.jpg)
[yolo3d]: real time detection of end-to-end 3D point cloud input
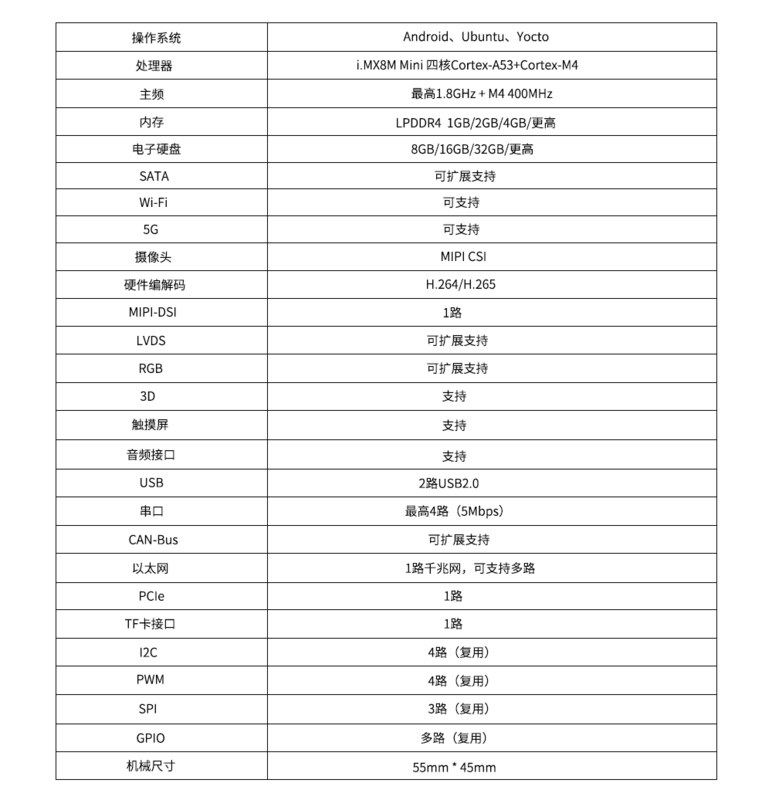
High performance and low power cortex-a53 core board | i.mx8m Mini

Retrofit's callback hell is really vulnerable in kotlin synergy mode
![[mv-3d] - multi view 3D target detection network](/img/aa/741b36ead2dfaa5a165401b8d657b7.jpg)
[mv-3d] - multi view 3D target detection network

Gradle foundation | customize the plug-in and upload it to jitpack

uniapp 使用canvas 生成海报并保存到本地

Review materials of project management PMP high frequency examination sites (8-1)
随机推荐
MySQL connection query and subquery
Global and Chinese markets for welding equipment and consumables 2022-2028: Research Report on technology, participants, trends, market size and share
Failed to upgrade schema, error: “file does not exist
Screenshot literacy tool download and use
Oracle common SQL
[HCIA continuous update] overview of dynamic routing protocol
[mv-3d] - multi view 3D target detection network
PY3, PIP appears when installing the library, warning: ignoring invalid distribution -ip
蓝桥杯单片机省赛第十二届第二场
Qt的网络连接方式
高性能 低功耗Cortex-A53核心板 | i.MX8M Mini
汇率的查询接口
[数据库]JDBC
Object oriented thinking
What is the logical structure of database file
Getting started with MQ
初识string+简单用法(二)
数据库文件逻辑结构形式指的是什么
ThreadLocal详解
Global and Chinese market of X-ray detectors 2022-2028: Research Report on technology, participants, trends, market size and share