当前位置:网站首页>蓝桥杯单片机省赛第七届
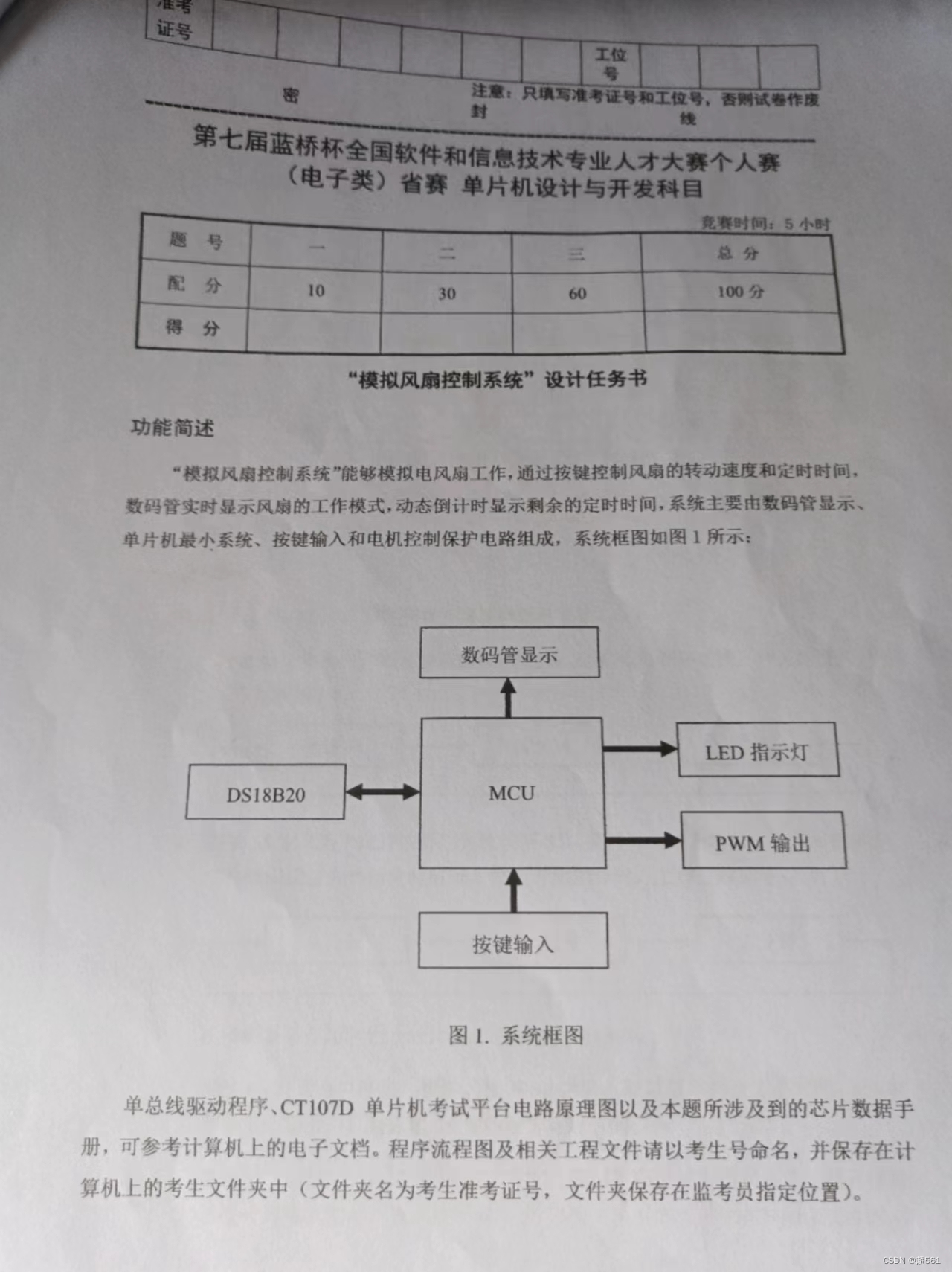
蓝桥杯单片机省赛第七届
2022-07-02 03:29:00 【超561】
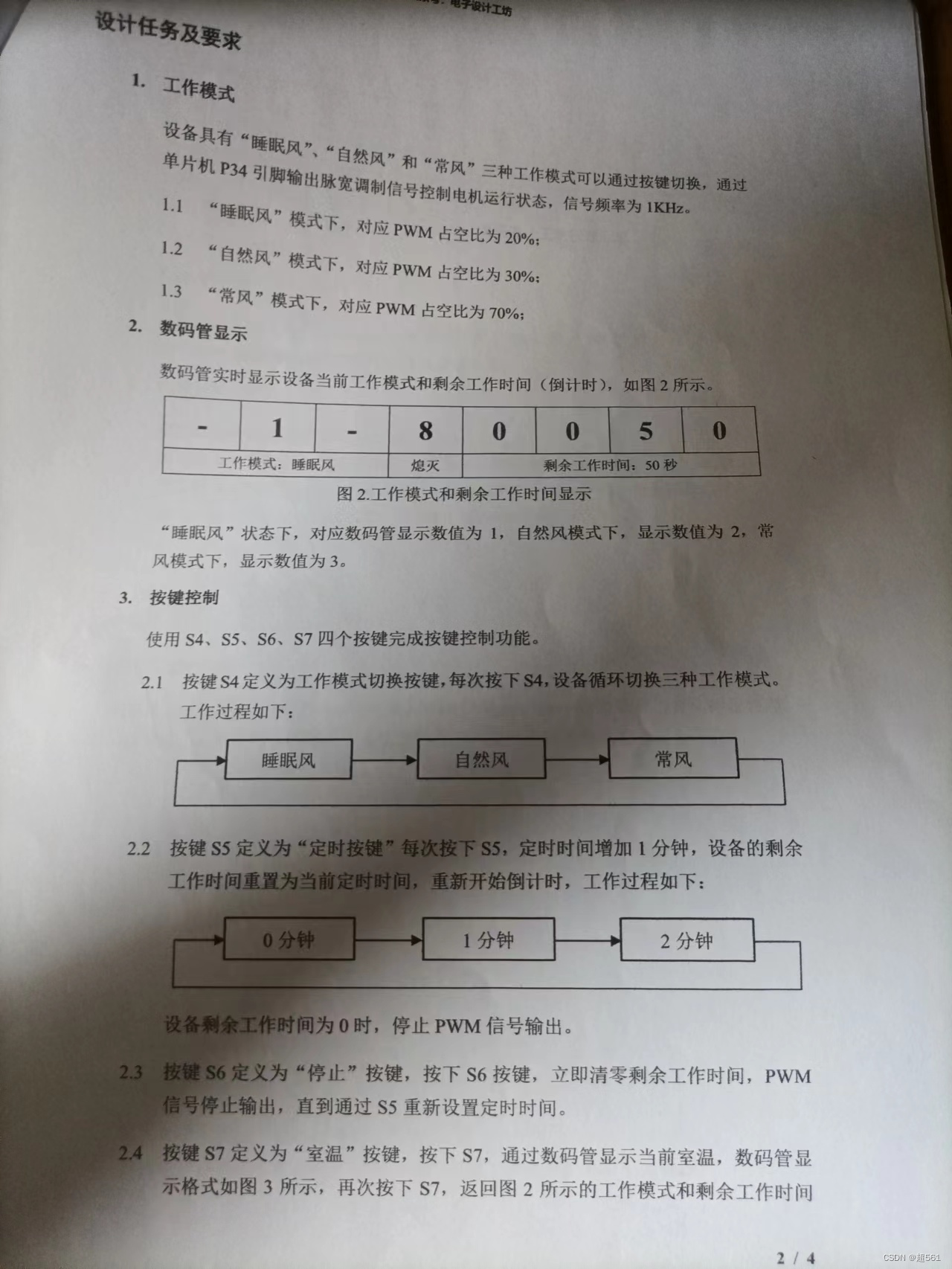
难点:如何控制pwm;已知频率为1kHZ,所以周期为1ms,使用100us的定时器,定义一个变量来记录过了多少时间,若想输出20%,前八个为0让第八个置1第十个置0;
main.c
#include <STC15F2K60S2.H>
#include <ONEWIRE.H>
void Timer2Init() //1毫秒@12.000MHz
{
AUXR &= 0xFB; //定时器时钟12T模式
T2L = 0x18; //设置定时初值
T2H = 0xFC; //设置定时初值
AUXR |= 0x10; //定时器2开始计时
IE2|=0X04;
EA=1;
}
void Timer0Init() //100微秒@12.000MHz
{
AUXR &= 0x7F; //定时器时钟12T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0x9C; //设置定时初值
TH0 = 0xFF; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0=1;
EA=1;
}
void Device_ctrl(unsigned char p2date,unsigned char p0date)
{
P0=p0date;
P2=P2&0X1F|p2date;
P2&=0X1F;
}
unsigned char mode_display[8];
unsigned char temp_display[8];
unsigned char smg_du[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};
unsigned int smg_count;
unsigned char display_mode;
unsigned char mode=1;
unsigned int time;
unsigned int time_count;
unsigned int temp;
unsigned int temp_count;
void temp_process()
{
if(temp_count>100)
{
temp_count=0;
temp=read_temp();
}
}
void smg_show()
{
unsigned char i;
Device_ctrl(0xc0,0);
if(display_mode==0)
{
Device_ctrl(0xe0,~mode_display[i]);
}
else
{
Device_ctrl(0xe0,~temp_display[i]);
}
Device_ctrl(0xc0,0x01<<i);
i=(i+1)%8;
}
void smg_process()
{
if(smg_count>3)
{
smg_count=0;
mode_display[0]=0x40;
mode_display[2]=0x40;
mode_display[3]=0x00;
temp_display[0]=0x40;
temp_display[1]=smg_du[4];
temp_display[2]=0x40;
temp_display[3]=0x00;
temp_display[4]=0x00;
temp_display[7]=0x39;
if(display_mode==0)
{
mode_display[1]=smg_du[mode];
mode_display[4]=smg_du[time/1000];
mode_display[5]=smg_du[time/100%10];
mode_display[6]=smg_du[time/10%10];
mode_display[7]=smg_du[time%10];
}
else
{
temp_display[5]=smg_du[temp/10];
temp_display[6]=smg_du[temp%10];
}
}
}
unsigned char Trig_btn;
unsigned char Cont_btn;
unsigned int key_count;
void key_btn()
{
unsigned char readdate=P3^0XFF;
Trig_btn=readdate&(Cont_btn^readdate);
Cont_btn=readdate;
}
void key_process()
{
if(key_count>=5)
{
key_btn();
key_count=0;
if(Trig_btn==0x08)//s4
{
if(display_mode==0)
{
mode++;
if(mode==4)
{
mode=1;
}
}
}
if(Trig_btn==0x04)//s5
{
if(display_mode==0)
{
if(time<9939)
{
time=time+60;
}
}
}
if(Trig_btn==0x02)//s6
{
if(display_mode==0)
{
time=0;
}
}
if(Trig_btn==0x01)//s7
{
display_mode++;
if(display_mode==2)
{
display_mode=0;
}
}
}
}
unsigned int led_count;
void led_process()
{
if(led_count>5)
{
led_count=0;
if(time)
{
if(mode==1)
{
Device_ctrl(0x80,~0x01);
}
else if(mode==2)
{
Device_ctrl(0x80,~0x02);
}
else
{
Device_ctrl(0x80,~0x04);
}
}
else
{
Device_ctrl(0x80,0xff);
}
}
}
void main()
{
Timer2Init();
Timer0Init();
Device_ctrl(0xa0,0x00);
while(1)
{
smg_process();
key_process();
led_process();
temp_process();
}
}
unsigned int mode_count;
void timer0service() interrupt 1
{
mode_count++;
if(mode==1)
{
if(mode_count==8)
{P34=1;}
if(mode_count==10)
{P34=0;}
}
else if(mode==2)
{
if(mode_count==7)
{P34=1;}
if(mode_count==10)
{P34=0;}
}
else
{
if(mode_count==3)
{P34=1;}
if(mode_count==10)
{P34=0;}
}
}
void timer2service() interrupt 12
{
smg_count++;
smg_show();
key_count++;
time_count++;
led_count++;
temp_count++;
if(time_count>=1000)
{
time_count=0;
if(time)
{
time--;
}
}
}ONEWIRE.C
#include "onewire.h"
//单总线内部延时函数
void Delay_OneWire(unsigned int t)
{
t=t*12;
while(t--);
}
//单总线写操作
void Write_DS18B20(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = dat&0x01;
Delay_OneWire(5);
DQ = 1;
dat >>= 1;
}
Delay_OneWire(5);
}
//单总线读操作
unsigned char Read_DS18B20(void)
{
unsigned char i;
unsigned char dat;
for(i=0;i<8;i++)
{
DQ = 0;
dat >>= 1;
DQ = 1;
if(DQ)
{
dat |= 0x80;
}
Delay_OneWire(5);
}
return dat;
}
//DS18B20初始化
bit init_ds18b20(void)
{
bit initflag = 0;
DQ = 1;
Delay_OneWire(12);
DQ = 0;
Delay_OneWire(80);
DQ = 1;
Delay_OneWire(10);
initflag = DQ;
Delay_OneWire(5);
return initflag;
}
float read_temp()
{
unsigned char low,high;
float date;
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0x44);
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0xbe);
low=Read_DS18B20();
high=Read_DS18B20();
date=(high<<8)|low;
date=date*0.0625;
return date;
}ONEWIRE.H
#ifndef __ONEWIRE_H
#define __ONEWIRE_H
#include <STC15F2K60S2.H>
sbit DQ = P1^4;
float read_temp();
#endif边栏推荐
- In depth analysis of C language - variable error prone knowledge points # dry goods inventory #
- Framing in data transmission
- Named block Verilog
- 蓝桥杯单片机省赛第十一届第二场
- MySQL之账号管理
- In the era of programmers' introspection, five-year-old programmers are afraid to go out for interviews
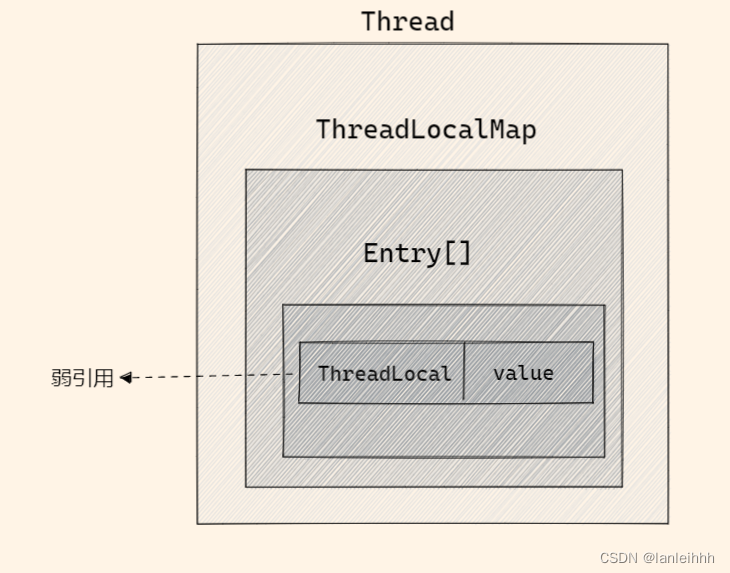
- ThreadLocal详解
- Network connection mode of QT
- GSE104154_scRNA-seq_fibrotic MC_bleomycin/normalized AM3
- "Analysis of 43 cases of MATLAB neural network": Chapter 41 implementation of customized neural network -- personalized modeling and Simulation of neural network
猜你喜欢
PY3, PIP appears when installing the library, warning: ignoring invalid distribution -ip
ThreadLocal详解
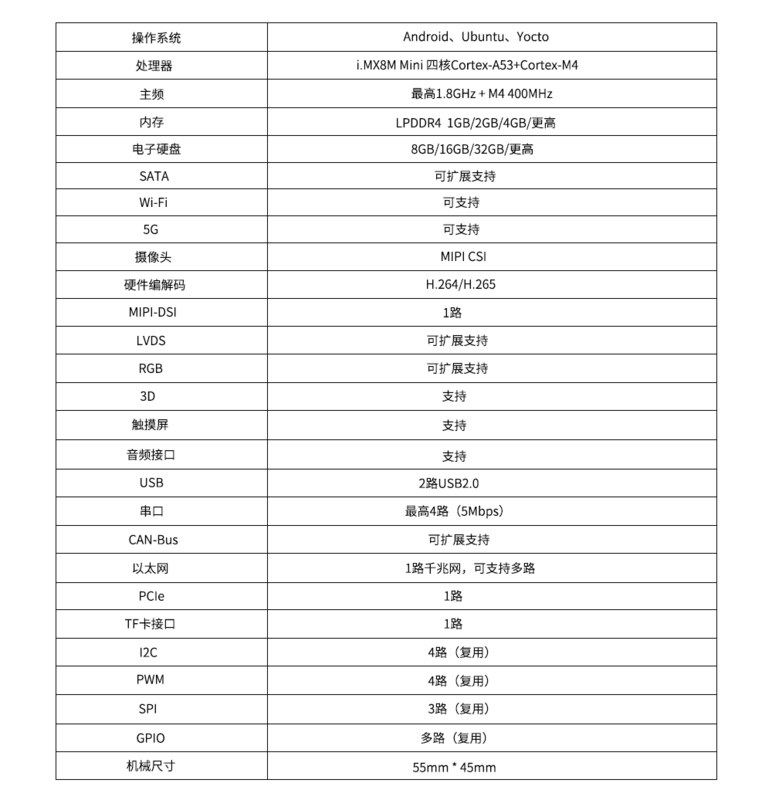
High performance and low power cortex-a53 core board | i.mx8m Mini

Unity脚本的基础语法(6)-特定文件夹

Verilog state machine

Named block Verilog

Screenshot literacy tool download and use
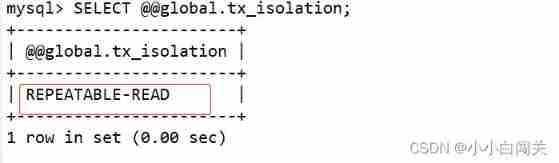
MySQL index, transaction and storage engine

Getting started with MQ
Halcon image rectification
随机推荐
What do you know about stock selling skills and principles
Go执行shell命令
ImageAI安装
Kotlin基础学习 17
How to establish its own NFT market platform in 2022
Learn PWN from CTF wiki - ret2shellcode
Eight steps of agile development process
MySQL advanced (Advanced) SQL statement (II)
Uniapp uses canvas to generate posters and save them locally
Grpc快速实践
venn圖取交集
【DesignMode】原型模式(prototype pattern)
ThreadLocal详解
Kotlin basic learning 15
Global and Chinese market of X-ray detectors 2022-2028: Research Report on technology, participants, trends, market size and share
Global and Chinese markets for electronic laryngoscope systems 2022-2028: Research Report on technology, participants, trends, market size and share
In wechat applet, the externally introduced JS is used in xwml for judgment and calculation
Detailed explanation of ThreadLocal
【DesignMode】建造者模式(Builder model)
aaaaaaaaaaaaa