当前位置:网站首页>CAD ARX 获取当前的视口设置
CAD ARX 获取当前的视口设置
2022-07-06 07:51:00 【zxt_net】
AcDbViewTableRecord GetCurrentView()
{
AcDbViewTableRecord view;
struct resbuf rb;
struct resbuf wcs, ucs, dcs; // 转换坐标时使用的坐标系统标记
wcs.restype = RTSHORT;
wcs.resval.rint = 0;
ucs.restype = RTSHORT;
ucs.resval.rint = 1;
dcs.restype = RTSHORT;
dcs.resval.rint = 2;
// 获得当前视口的“查看”模式
acedGetVar(“VIEWMODE”, &rb);
view.setPerspectiveEnabled(rb.resval.rint & 1);
view.setFrontClipEnabled(rb.resval.rint & 2);
view.setBackClipEnabled(rb.resval.rint & 4);
view.setFrontClipAtEye(!(rb.resval.rint & 16));
// 当前视口中视图的中心点(UCS坐标)
acedGetVar(“VIEWCTR”, &rb);
acedTrans(rb.resval.rpoint, &ucs, &dcs, 0, rb.resval.rpoint);
view.setCenterPoint(AcGePoint2d(rb.resval.rpoint[X],
rb.resval.rpoint[Y]));
// 当前视口透视图中的镜头焦距长度(单位为毫米)
acedGetVar(“LENSLENGTH”, &rb);
view.setLensLength(rb.resval.rreal);
// 当前视口中目标点的位置(以 UCS 坐标表示)
acedGetVar(“TARGET”, &rb);
acedTrans(rb.resval.rpoint, &ucs, &wcs, 0, rb.resval.rpoint);
view.setTarget(AcGePoint3d(rb.resval.rpoint[X],
rb.resval.rpoint[Y], rb.resval.rpoint[Z]));
// 当前视口的观察方向(UCS)
acedGetVar(“VIEWDIR”, &rb);
acedTrans(rb.resval.rpoint, &ucs, &wcs, 1, rb.resval.rpoint);
view.setViewDirection(AcGeVector3d(rb.resval.rpoint[X],
rb.resval.rpoint[Y], rb.resval.rpoint[Z]));
// 当前视口的视图高度(图形单位)
acedGetVar(“VIEWSIZE”, &rb);
view.setHeight(rb.resval.rreal);
double height = rb.resval.rreal;
// 以像素为单位的当前视口的大小(X 和 Y 值)
acedGetVar(“SCREENSIZE”, &rb);
view.setWidth(rb.resval.rpoint[X] / rb.resval.rpoint[Y] * height);
// 当前视口的视图扭转角
acedGetVar(“VIEWTWIST”, &rb);
view.setViewTwist(rb.resval.rreal);
// 将模型选项卡或最后一个布局选项卡置为当前
acedGetVar(“TILEMODE”, &rb);
int tileMode = rb.resval.rint;
// 设置当前视口的标识码
acedGetVar(“CVPORT”, &rb);
int cvport = rb.resval.rint;
// 是否是模型空间的视图
bool paperspace = ((tileMode == 0) && (cvport == 1)) ? true : false;
view.setIsPaperspaceView(paperspace);
if (!paperspace)
{
// 当前视口中前向剪裁平面到目标平面的偏移量
acedGetVar(“FRONTZ”, &rb);
view.setFrontClipDistance(rb.resval.rreal);
// 获得当前视口后向剪裁平面到目标平面的偏移值
acedGetVar(“BACKZ”, &rb);
view.setBackClipDistance(rb.resval.rreal);
}
else
{
view.setFrontClipDistance(0.0);
view.setBackClipDistance(0.0);
}
return view;
}
边栏推荐
- Rust language - receive command line parameter instances
- 解决方案:智慧工地智能巡检方案视频监控系统
- P3047 [usaco12feb]nearby cows g (tree DP)
- Brief explanation of instagram operation tips in 2022
- Le chemin du navigateur Edge obtient
- [untitled]
- Solution: système de surveillance vidéo intelligent de patrouille sur le chantier
- Google may return to the Chinese market after the Spring Festival.
- 继电反馈PID控制器参数自整定
- (lightoj - 1410) consistent verbs (thinking)
猜你喜欢

【Redis】NoSQL数据库和redis简介
Inspiration from the recruitment of bioinformatics analysts in the Department of laboratory medicine, Zhujiang Hospital, Southern Medical University
The Vice Minister of the Ministry of industry and information technology of "APEC industry +" of the national economic and information technology center led a team to Sichuan to investigate the operat
![[Yugong series] February 2022 U3D full stack class 011 unity section 1 mind map](/img/c3/1b6013bfb2441219bf621c3f0726ea.jpg)
[Yugong series] February 2022 U3D full stack class 011 unity section 1 mind map

The ECU of 21 Audi q5l 45tfsi brushes is upgraded to master special adjustment, and the horsepower is safely and stably increased to 305 horsepower
"Friendship and righteousness" of the center for national economy and information technology: China's friendship wine - the "unparalleled loyalty and righteousness" of the solidarity group released th

In the era of digital economy, how to ensure security?
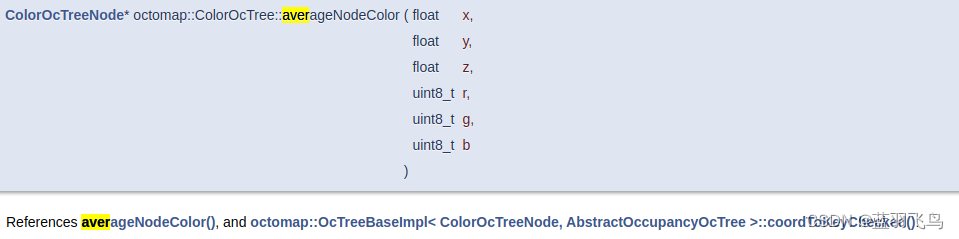
Description of octomap averagenodecolor function
![[t31zl intelligent video application processor data]](/img/67/b77c1de990d9b8868f8df5e55b0227.png)
[t31zl intelligent video application processor data]
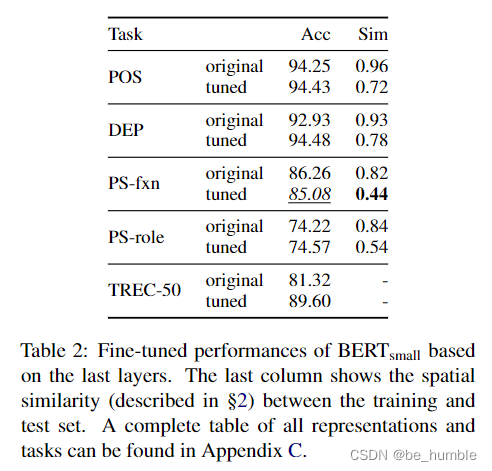
A Closer Look at How Fine-tuning Changes BERT
随机推荐
What are the ways to download network pictures with PHP
Is the super browser a fingerprint browser? How to choose a good super browser?
The ECU of 21 Audi q5l 45tfsi brushes is upgraded to master special adjustment, and the horsepower is safely and stably increased to 305 horsepower
http缓存,强制缓存,协商缓存
[dictionary tree] [trie] p3879 [tjoi2010] reading comprehension
[computer skills]
实现精细化生产, MES、APS、ERP必不可少
22. Empty the table
[t31zl intelligent video application processor data]
Compliance and efficiency, accelerate the digital transformation of pharmaceutical enterprises, and create a new document resource center for pharmaceutical enterprises
Go learning notes (3) basic types and statements (2)
Data governance: 3 characteristics, 4 transcendence and 3 28 principles of master data
C intercept string
flask返回文件下载
[count] [combined number] value series
(lightoj - 1410) consistent verbs (thinking)
[cf gym101196-i] waif until dark network maximum flow
Three no resumes in the software testing industry. What does the enterprise use to recruit you? Shichendahai's resume
49. Sound card driven article collection
It's hard to find a job when the industry is in recession