当前位置:网站首页>迁移学习和域自适应
迁移学习和域自适应
2022-07-05 08:51:00 【Wanderer001】
迁移学习和领域自适应指的是利用一个情景(例如,分布P1)中已经学到的内容去改善另一个情景(比如分布P2)中的泛化情况,在无监督学习任务和监督学习任务之间转义表示。
在迁移学习中,学习器必须执行两个或更多个不同的任务,但是我们假设能够解释P1变化的许多因素和学习P2需要抓住的相关变化。这通常能够在监督学习中解释,输入是相同的,但是输出不同的性质。例如,我么可能在第一种情景中学习了一组视觉类别,比如猫和狗,然后在第二种情景中学习一组不同的视觉类别,比如蚂蚁和黄蜂。如果第一种情景(从P1采样)中具有非常多的数据,那么有助于学习到能够使得从P2抽取的非常少样本中快速泛化的表示。许多视觉类别共享一些低级概念,比如边缘、视觉形状、集合变化、光照变化的影响等。一般而言,当存在不同情景或任务有用特征时,并且这些特征对应某个情景出现的潜在因素,迁移学习、多任务学习和领域自适应可以使用表示学习来实现。
有时不同任务之间共享之间共享的不是输入的语义,而是输出的语义。例如,语音识别系统需要在输出层产生有效的句子,但是输入附近的较低层可能需要识别相同音素或子音素发音的非常不同的版本(这取决于说话的人)。在这样的情况下,共享神经网络的上层(输出附近)和进行任务特定预处理是有意义的。
在域自适应领域(domain adaption)的相关情况下,在每个情景之间的任务(和最优的输入到输出的映射)都是相同的,但是输入分布稍有不同。例如,考虑感情分析的任务,如判断一条评论是表达积极还是消极的情绪。网上的癖评论有许多类别。在书、视频和音乐等媒体内容上训练的顾客评论情感预测器,被用于分析诸如电视机或智能电话的消费电子产品的评论时,域自适应情景可能出现。可以想象,存在一个潜在的函数可以判断任何语句是正面的、中性的还是负面的,但是词汇和风格可能会因领域而又差异,使得跨域的泛化训练变得更加困难。简单的无监督训练(去噪自编码器)已经能够非常成功地用于域自适应的感情分析。
一个相关的问题是概念漂移(concept drift),我们可以将其视为一种迁移学习,因为数据分布随时间而逐渐变化。概念漂移个迁移学习可以被视为多任务学习的特定形式。“多任务学习”这个术语通常指监督学习任务,而更广义的迁移学习的概念也适用于无监督学习和强化学习。
在所有这些情况下,我们的目标是利用第一个情景下的数据,提取那些在第二种情景中学习时或直接进行预测时可能有用的信息。表示学习的核心思想是相同的表示可能在两种情景中都是有用的。两个情景使用相同的表示,使得表示可以受益于两个任务的训练数据。
如前所述,迁移学习中无监督深度学习已经在一些机器学习比赛中取得了成功。这些比赛中的某一个实验配置下。首先每个参与者获得一个第一种情景(来自分布P1)的数据集,其中有一些类别的样本。参与者必须使用这个来学习一个良好的特征空间来学习一个良好的特征空间(将原始输入映射到某种表示),使得当我们将这个学变变换用于来自迁移情景(分布P2)的输入时,线性分类器可以很少标注样本上训练,并泛化得很好。这个比赛中最引人注目的结果是,学习表示的网络架构越深(在第一个情景P1中的数据使用纯无监督方式学习),在第二个情景(迁移)P2的新类别上学习到的曲线就越好。对于深度表示而言,迁移学习只需要少量标注样本就能显著提升泛化性能。迁移学习的两种极端形式是一次学习(one-shot learning)和零次学习(zero-shot learning) ,有时也被称为零数据学习(zero-data learning)。只有一个标注样本的迁移任务被称为一次学习;没有标注样本的迁移任务被称为零次学习。
因为第一阶段学习学习出的表示就可以清楚地分离出潜在的类别,所以一次学习是可能的。在迁移学习阶段,仅需要一个标注样本来推断表示空间中聚集在相同点周围许多可能测试样本的标签。这使得在学成的表示空间中,对应于不变性的变化因子已经与其他因子完全分离,在区分某些类别的对象时,我们可以学习到哪些因素具有决定性意义。
考虑一个零次学习情景的例子,学习器已经读取了大量文本,然后要解决对象识别的问题。如果文本足够好地描述了对象,那么即使没有看到某对象的图像,也能识别出该对象的类别。例如,已知猫有4条腿的尖尖的耳朵,那么学习器可以在没有见过猫的情况下猜测该图像中是猫。
只有在训练时使用了额外的信息,零数据学习和零次学习才是可能的。我们可以认为零数据学习场景包含3个随机变量:传统输入x,传统输出y,以及描述任务的附加随机变量T。该模型被训练来估计条件分布p(x|y,T),其中T是我们希望执行的任务的描述。在我们的例子中,读取猫的文本信息然后识别猫,例如“这个图像中是否有猫?”如果训练集包含和T在相同空间的无监督对象样本,我们也许能够推断未知的T实例的含义。在我们的例子中,没有提前看到猫的图像去识别猫,所以拥有一些未标注文本数据包含句子诸如“猫有4条腿”或“猫有尖耳朵”,对于学习非常有帮助与。
只有在训练时使用了额外信息,零数据学习和零次学习才是可能的。我们可以认为零数据学习场景包含了3个随机变量:传统输入或目标y,以及描述任务的附加随机变量T。该模型被训练来估计条件分布p(y|x,T),其中T是我们希望执行的任务的描述。在我们的例子中,读取该猫的文本信息人后识别猫,输出是二元变量y,y=1表示“是”,y=0表示“不是”。任务变量T表示要回答的问题,例如“这个图像是否有猫?”如果训练集包含和T在相同空间的无监督对象的样本,我们也许能够推断未知T实例的含义。在我们的例子中,没有提前看到猫的图像去识别猫,所以拥有一些标注文本数据包含句子诸如“猫有4条腿”或“猫有尖耳朵”,对于学习非常有帮助。
零次学习要求要求T被表示为某种形式的泛化。例如,T不能仅是指示对象类别的one-hot编码。通过使用每个类别词的嵌入表示,提出了对象类别的分布式表示。我们还可以在机器翻译中发现一种类似的现象:我们已经知道一种语言中的单词,还可以学到单一语言语料库中词与词之间的关系,另一方面,我们已经翻译了一种语言中的单词与另一种语言中的单词相关的句子。即使我们可能没有将语言X中的单词A翻译成语言Y中的单词B的标注样本,我们也可以泛化并猜出单词A的翻译,这是由于我们已经学习了语言X和Y单词的分布式表示,并且通过两种语言句子的匹配对组成的训练样本,产生了关联与两个空间的链路(可能是双向的)。如果联合学习3种成分(两种表示形式和它们之间的关系),那么这种迁移将会非常成功。
零次学习是迁移学习的一种特殊形式。同样的原理可以解释如何执行多模态学习(multimodel learning),学习两种模态的表示,和一种模态中的观察结果x与另一种模态中的观察结果y组成的对(x,y)之间的关系(通常是一个联合分布)。通过学习所有的三组参数(从x到它的表示,从y到它的表示,以及两个表示之间的关系),一个表示中的概念被锚定在另一个表示中,反之亦然,从而可以有效地推广到新的对。
边栏推荐
- Ros-10 roslaunch summary
- Run menu analysis
- Ros- learn basic knowledge of 0 ROS - nodes, running ROS nodes, topics, services, etc
- Solution to the problem of the 10th Programming Competition (synchronized competition) of Harbin University of technology "Colin Minglun Cup"
- MPSoC QSPI Flash 升级办法
- Basic number theory - factors
- Adaboost使用
- Oracle advanced (III) detailed explanation of data dictionary
- kubeadm系列-02-kubelet的配置和启动
- [daiy4] copy of JZ35 complex linked list
猜你喜欢
My university

Guess riddles (142)
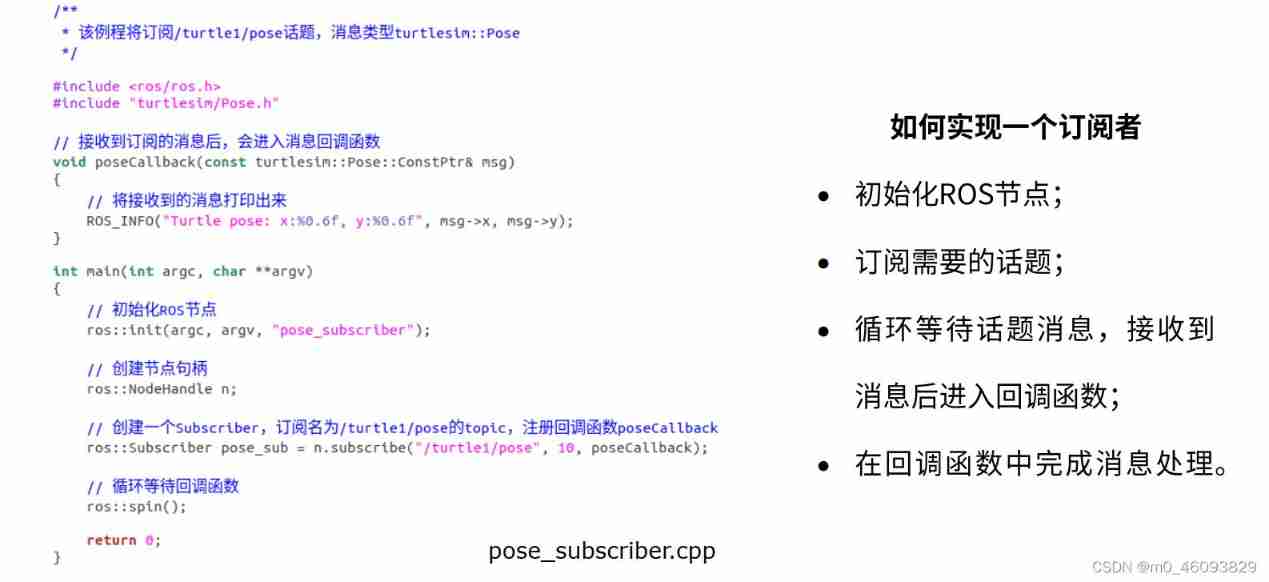
Programming implementation of subscriber node of ROS learning 3 subscriber
![[daiy4] copy of JZ35 complex linked list](/img/bc/ce90bb3cb6f52605255f1d6d6894b0.png)
[daiy4] copy of JZ35 complex linked list

Halcon clolor_ pieces. Hedv: classifier_ Color recognition
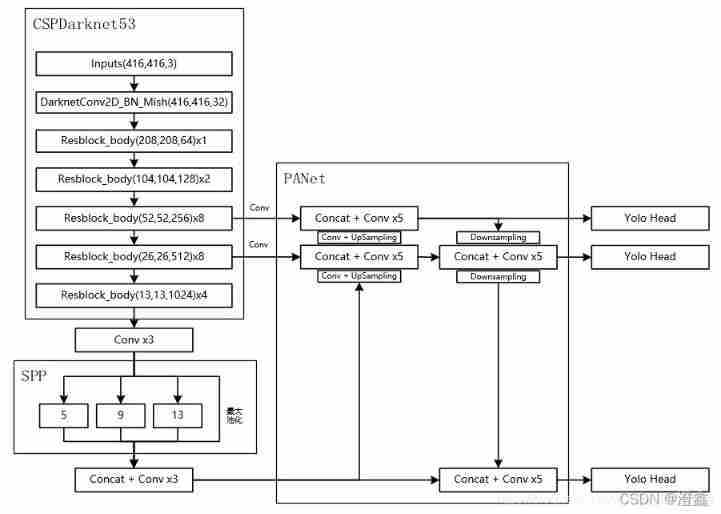
Yolov4 target detection backbone
Guess riddles (9)
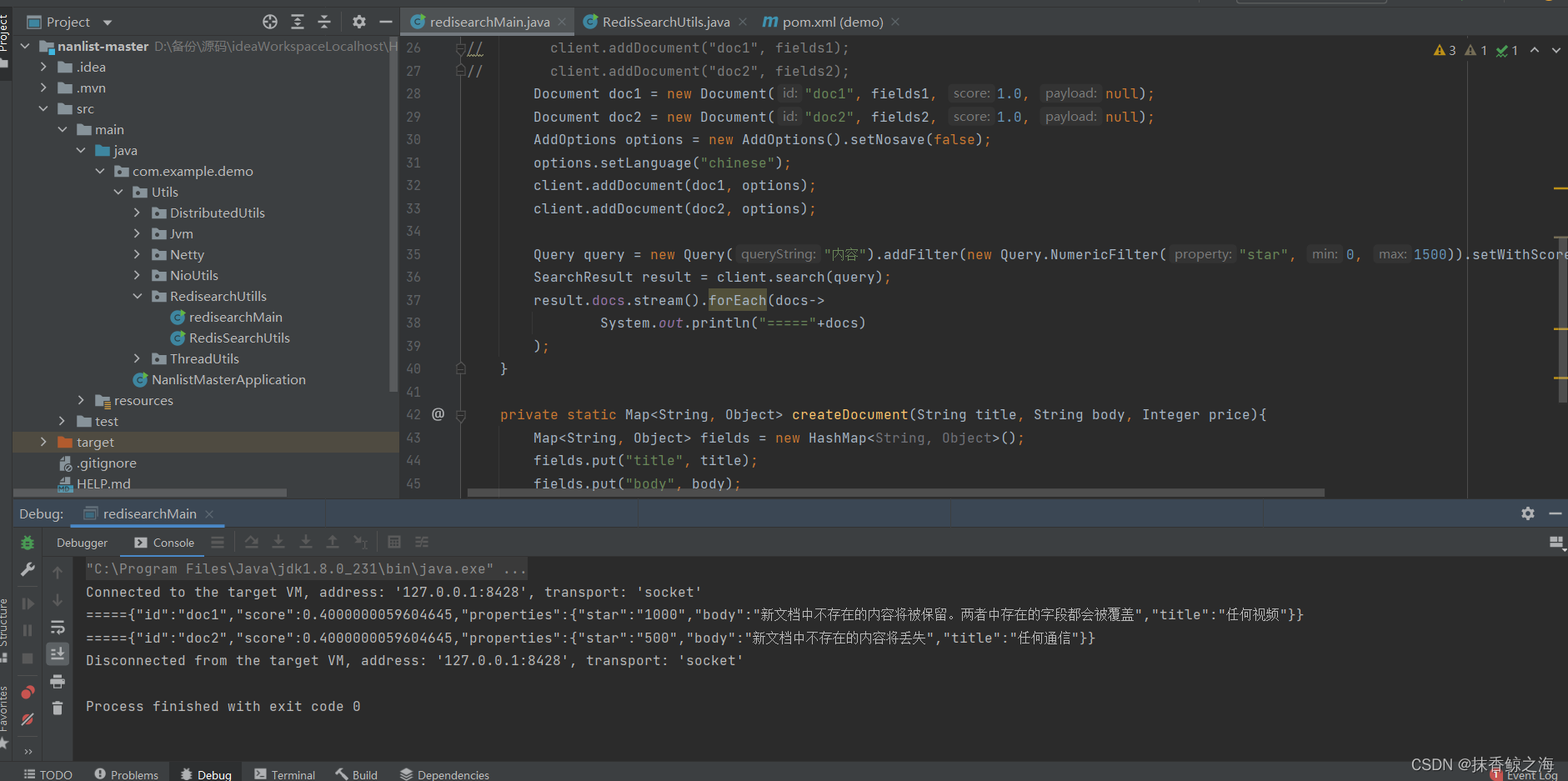
Redis实现高性能的全文搜索引擎---RediSearch
Add discount recharge and discount shadow ticket plug-ins to the resource realization applet

Programming implementation of ROS learning 2 publisher node
随机推荐
Redis implements a high-performance full-text search engine -- redisearch
Programming implementation of subscriber node of ROS learning 3 subscriber
Dynamic dimensions required for input: input, but no shapes were provided. Automatically overriding
Codeworks round 638 (Div. 2) cute new problem solution
Blue Bridge Cup provincial match simulation question 9 (MST)
Warning: retrying occurs during PIP installation
Halcon snap, get the area and position of coins
Search data in geo database
Digital analog 2: integer programming
【日常训练】1200. 最小绝对差
Program error record 1:valueerror: invalid literal for int() with base 10: '2.3‘
Programming implementation of ROS learning 5-client node
Digital analog 1: linear programming
uni-app 实现全局变量
It cold knowledge (updating ing~)
[daily training] 1200 Minimum absolute difference
C#图像差异对比:图像相减(指针法、高速)
Tips 1: Web video playback code
One dimensional vector transpose point multiplication np dot
[daiy4] jz32 print binary tree from top to bottom