当前位置:网站首页>[deep learning] semantic segmentation experiment: UNET network /msrc2 dataset
[deep learning] semantic segmentation experiment: UNET network /msrc2 dataset
2022-07-07 15:07:00 【zstar-_】
This experiment uses Unet Network pair MSRC2 Data sets are divided
Source code files and MSRC2 See the end of the text for the data set acquisition method
1. Data partitioning
Organize the picture data from the folder into csv file , Each line represents its path
class image2csv(object):
# Split training set Verification set Test set
# Make corresponding txt
def __init__(self, data_root, image_dir, label_dir, slice_data, width_input, height_input):
self.data_root = data_root
self.image_dir = image_dir
self.label_dir = label_dir
self.slice_train = slice_data[0]
self.slice_val = slice_data[1]
self.width = width_input
self.height = height_input
def read_path(self):
images = []
labels = []
for i, im in enumerate(os.listdir(self.image_dir)):
label_name = im.split('.')[0] + '_GT' + '.bmp'
# Because the size of each picture is different , Here is a simple screening , Only the length and width are greater than 200px Was selected
if os.path.exists(os.path.join(self.label_dir, label_name)):
size_w, size_h = Image.open(
os.path.join(self.image_dir, im)).size
size_lw, size_lh = Image.open(
os.path.join(self.label_dir, label_name)).size
if min(size_w, size_lw) > self.width and min(size_h, size_lh) > self.height:
images.append(os.path.join(self.image_dir, im))
labels.append(os.path.join(self.label_dir, label_name))
else:
continue
self.data_length = len(images) # The length of the pictures in both folders
data_path = {
'image': images,
'label': labels,
}
return data_path
def generate_csv(self):
data_path = self.read_path() # Stored path
data_path_pd = pd.DataFrame(data_path)
train_slice_point = int(self.slice_train*self.data_length) # 0.7*len
validation_slice_point = int(
(self.slice_train+self.slice_val)*self.data_length) # 0.8*len
train_csv = data_path_pd.iloc[:train_slice_point, :]
validation_csv = data_path_pd.iloc[train_slice_point:validation_slice_point, :]
test_csv = data_path_pd.iloc[validation_slice_point:, :]
train_csv.to_csv(os.path.join(
self.data_root, 'train.csv'), header=None, index=None)
validation_csv.to_csv(os.path.join(
self.data_root, 'val.csv'), header=None, index=None)
test_csv.to_csv(os.path.join(self.data_root, 'test.csv'),
header=False, index=False)
2. Data preprocessing
Color and classification label conversion
Semantic segmentation is mainly to build a color map (colormap), Give different color labels to each class of segmented objects .
def colormap(n):
cmap = np.zeros([n, 3]).astype(np.uint8)
for i in np.arange(n):
r, g, b = np.zeros(3)
for j in np.arange(8):
r = r + (1 << (7 - j)) * ((i & (1 << (3 * j))) >> (3 * j))
g = g + (1 << (7 - j)) * ((i & (1 << (3 * j + 1))) >> (3 * j + 1))
b = b + (1 << (7 - j)) * ((i & (1 << (3 * j + 2))) >> (3 * j + 2))
cmap[i, :] = np.array([r, g, b])
return cmap
class label2image():
def __init__(self, num_classes=22):
self.colormap = colormap(256)[:num_classes].astype('uint8')
def __call__(self, label_pred, label_true):
pred = self.colormap[label_pred]
true = self.colormap[label_true]
return pred, true
class image2label():
def __init__(self, num_classes=22):
# Give each category a color
colormap = [[0, 0, 0], [128, 0, 0], [0, 128, 0], [128, 128, 0],
[0, 0, 128], [0, 128, 128], [128, 128, 128], [192, 0, 0],
[64, 128, 0], [192, 128, 0], [64, 0, 128], [192, 0, 128],
[64, 128, 128], [192, 128, 128], [0, 64, 0], [128, 64, 0],
[0, 192, 0], [128, 64, 128], [
0, 192, 128], [128, 192, 128],
[64, 64, 0], [192, 64, 0]]
self.colormap = colormap[:num_classes]
# establish 256^3 Power empty array , All combinations of colors
cm2lb = np.zeros(256 ** 3)
for i, cm in enumerate(self.colormap):
cm2lb[(cm[0] * 256 + cm[1]) * 256 + cm[2]] = i # Mark this kind of combination
self.cm2lb = cm2lb
def __call__(self, image):
image = np.array(image, dtype=np.int64)
idx = (image[:, :, 0] * 256 + image[:, :, 1]) * 256 + image[:, :, 2]
label = np.array(self.cm2lb[idx], dtype=np.int64) # Find this according to the color bar label Label of
return label
Image clipping
class RandomCrop(object):
""" Customize the implementation image and label Randomly crop the same position """
def __init__(self, size):
self.size = size
@staticmethod
def get_params(img, output_size):
w, h = img.size
th, tw = output_size
if w == tw and h == th:
return 0, 0, h, w
i = random.randint(0, h - th)
j = random.randint(0, w - tw)
return i, j, th, tw
def __call__(self, img, label):
i, j, h, w = self.get_params(img, self.size)
return img.crop((j, i, j + w, i + h)), label.crop((j, i, j + w, i + h))
3. Data loading
class CustomDataset(Dataset):
def __init__(self, data_root_csv, input_width, input_height, test=False):
# When subclasses are initialized , Also want to inherit the parent class __init__() Just through super() Realization
super(CustomDataset, self).__init__()
self.data_root_csv = data_root_csv
self.data_all = pd.read_csv(self.data_root_csv)
self.image_list = list(self.data_all.iloc[:, 0])
self.label_list = list(self.data_all.iloc[:, 1])
self.width = input_width
self.height = input_height
def __len__(self):
return len(self.image_list)
def __getitem__(self, index):
img = Image.open(self.image_list[index]).convert('RGB')
label = Image.open(self.label_list[index]).convert('RGB')
img, label = self.train_transform(
img, label, crop_size=(self.width, self.height))
# assert(img.size == label.size)s
return img, label
def train_transform(self, image, label, crop_size=(256, 256)):
image, label = RandomCrop(crop_size)(
image, label) # The first bracket is the instance conversation object , The second is __call__ Method
tfs = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize([.485, .456, .406], [.229, .224, .225])
])
image = tfs(image)
label = image2label()(label)
label = torch.from_numpy(label).long()
return image, label
4.Unet Network structure
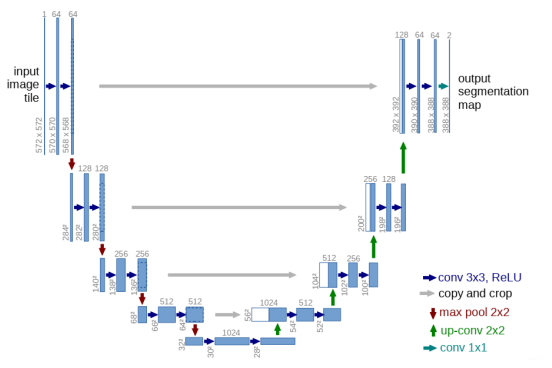
Double convolution structure

class DoubleConv(nn.Module):
def __init__(self, in_channels, out_channels, mid_channels=None):
super().__init__()
if not mid_channels:
mid_channels = out_channels
self.double_conv = nn.Sequential(
nn.Conv2d(in_channels, mid_channels, kernel_size=3, padding=1),
nn.BatchNorm2d(mid_channels),
nn.ReLU(inplace=True),
nn.Conv2d(mid_channels, out_channels, kernel_size=3, padding=1),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True)
)
def forward(self, x):
return self.double_conv(x)
Down sampling

class Down(nn.Module):
def __init__(self, in_channels, out_channels):
super().__init__()
self.maxpool_conv = nn.Sequential(
nn.MaxPool2d(2),
DoubleConv(in_channels, out_channels)
)
def forward(self, x):
return self.maxpool_conv(x)
On the sampling
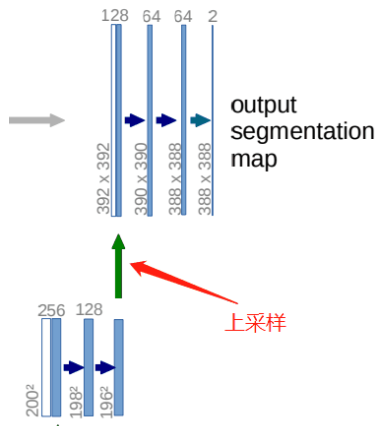
class Up(nn.Module):
def __init__(self, in_channels, out_channels, bilinear=True):
super().__init__()
if bilinear:
self.up = nn.Upsample(
scale_factor=2, mode='bilinear', align_corners=True)
self.conv = DoubleConv(in_channels, out_channels, in_channels // 2)
else:
self.up = nn.ConvTranspose2d(
in_channels, in_channels // 2, kernel_size=2, stride=2)
self.conv = DoubleConv(in_channels, out_channels)
def forward(self, x1, x2):
x1 = self.up(x1)
# input is CHW
diffY = x2.size()[2] - x1.size()[2]
diffX = x2.size()[3] - x1.size()[3]
x1 = F.pad(x1, [diffX // 2, diffX - diffX // 2,
diffY // 2, diffY - diffY // 2])
x = torch.cat([x2, x1], dim=1)
return self.conv(x)
Output
class OutConv(nn.Module):
def __init__(self, in_channels, out_channels):
super(OutConv, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=1)
def forward(self, x):
return self.conv(x)
The overall structure
class UNet(nn.Module):
def __init__(self, n_channels, n_classes, bilinear=True):
super(UNet, self).__init__()
self.n_channels = n_channels
self.n_classes = n_classes
self.bilinear = bilinear
self.inc = DoubleConv(n_channels, 64)
self.down1 = Down(64, 128)
self.down2 = Down(128, 256)
self.down3 = Down(256, 512)
factor = 2 if bilinear else 1
self.down4 = Down(512, 1024 // factor)
self.up1 = Up(1024, 512 // factor, bilinear)
self.up2 = Up(512, 256 // factor, bilinear)
self.up3 = Up(256, 128 // factor, bilinear)
self.up4 = Up(128, 64, bilinear)
self.outc = OutConv(64, n_classes)
def forward(self, x):
x1 = self.inc(x)
x2 = self.down1(x1)
x3 = self.down2(x2)
x4 = self.down3(x3)
x5 = self.down4(x4)
x = self.up1(x5, x4)
x = self.up2(x, x3)
x = self.up3(x, x2)
x = self.up4(x, x1)
logits = self.outc(x)
return logits
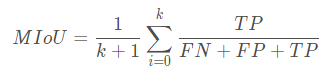
5. Evaluation indicators :MIoU
# Get the confusion matrix
def _fast_hist(label_true, label_pred, n_class):
mask = (label_true >= 0) & (label_true < n_class)
hist = np.bincount(
n_class * label_true[mask].astype(int) +
label_pred[mask], minlength=n_class ** 2).reshape(n_class, n_class)
return hist
# Calculation MIOU
def miou_score(label_trues, label_preds, n_class):
hist = np.zeros((n_class, n_class))
for lt, lp in zip(label_trues, label_preds):
hist += _fast_hist(lt.flatten(), lp.flatten(), n_class)
iou = np.diag(hist) / (hist.sum(axis=1) + hist.sum(axis=0) - np.diag(hist))
miou = np.nanmean(iou)
return miou
6. Training
GPU_ID = 0
INPUT_WIDTH = 200
INPUT_HEIGHT = 200
BATCH_SIZE = 2
NUM_CLASSES = 22
LEARNING_RATE = 1e-3
epoch = 300
net = UNet(3, NUM_CLASSES)
# -------------------- Generate csv ------------------
DATA_ROOT = './MSRC2/'
image = os.path.join(DATA_ROOT, 'Images')
label = os.path.join(DATA_ROOT, 'GroundTruth')
slice_data = [0.7, 0.1, 0.2] # Training verification Percentage of tests
tocsv = image2csv(DATA_ROOT, image, label, slice_data,
INPUT_WIDTH, INPUT_HEIGHT)
tocsv.generate_csv()
# -------------------------------------------
model_path = './model_result/best_model_UNet.mdl'
train_csv_dir = 'MSRC2/train.csv'
val_csv_dir = 'MSRC2/val.csv'
train_data = CustomDataset(train_csv_dir, INPUT_WIDTH, INPUT_HEIGHT)
train_dataloader = DataLoader(
train_data, batch_size=BATCH_SIZE, shuffle=True, num_workers=0)
val_data = CustomDataset(val_csv_dir, INPUT_WIDTH, INPUT_HEIGHT)
val_dataloader = DataLoader(
val_data, batch_size=BATCH_SIZE, shuffle=True, num_workers=0)
net = UNet(3, NUM_CLASSES)
use_gpu = torch.cuda.is_available()
# To build the network
optimizer = optim.Adam(net.parameters(), lr=LEARNING_RATE, weight_decay=1e-4)
criterion = nn.CrossEntropyLoss()
if use_gpu:
torch.cuda.set_device(GPU_ID)
net.cuda()
criterion = criterion.cuda()
if os.path.exists(model_path):
net.load_state_dict(torch.load(model_path))
print('successful load weight!')
else:
print('not successful load weight')
# Training validation
# def train():
best_score = 0.0
for e in range(epoch):
net.train()
train_loss = 0.0
label_true = torch.LongTensor()
label_pred = torch.LongTensor()
for i, (batchdata, batchlabel) in enumerate(train_dataloader):
if use_gpu:
batchdata, batchlabel = batchdata.cuda(), batchlabel.cuda()
output = net(batchdata)
output = F.log_softmax(output, dim=1)
loss = criterion(output, batchlabel)
pred = output.argmax(dim=1).squeeze().data.cpu()
real = batchlabel.data.cpu()
optimizer.zero_grad()
loss.backward()
optimizer.step()
train_loss += loss.cpu().item() * batchlabel.size(0)
label_true = torch.cat((label_true, real), dim=0)
label_pred = torch.cat((label_pred, pred), dim=0)
train_loss /= len(train_data)
miou = miou_score(
label_true.numpy(), label_pred.numpy(), NUM_CLASSES)
print('\nepoch:{}, train_loss:{:.4f},miou:{:.4f}'.format(
e + 1, train_loss, miou))
net.eval()
val_loss = 0.0
val_label_true = torch.LongTensor()
val_label_pred = torch.LongTensor()
with torch.no_grad():
for i, (batchdata, batchlabel) in enumerate(val_dataloader):
if use_gpu:
batchdata, batchlabel = batchdata.cuda(), batchlabel.cuda()
output = net(batchdata)
output = F.log_softmax(output, dim=1)
loss = criterion(output, batchlabel)
pred = output.argmax(dim=1).data.cpu()
real = batchlabel.data.cpu()
val_loss += loss.cpu().item() * batchlabel.size(0)
val_label_true = torch.cat((val_label_true, real), dim=0)
val_label_pred = torch.cat((val_label_pred, pred), dim=0)
val_loss /= len(val_data)
val_miou = miou_score(val_label_true.numpy(),
val_label_pred.numpy(), NUM_CLASSES)
print('epoch:{}, val_loss:{:.4f}, miou:{:.4f}'.format(
e + 1, val_loss, val_miou))
# Pass the val_miou To judge the effect of the model , Save the best model weights
score = val_miou
if score > best_score:
best_score = score
torch.save(net.state_dict(), model_path)
7. test
GPU_ID = 0
INPUT_WIDTH = 200
INPUT_HEIGHT = 200
BATCH_SIZE = 2
NUM_CLASSES = 22
LEARNING_RATE = 1e-3
model_path = './model_result/best_model_UNet.mdl'
torch.cuda.set_device(0)
net = UNet(3, NUM_CLASSES)
# Load the network for testing
test_csv_dir = './MSRC2/train.csv'
testset = CustomDataset(test_csv_dir, INPUT_WIDTH, INPUT_HEIGHT)
test_dataloader = DataLoader(testset, batch_size=15, shuffle=False)
net.load_state_dict(torch.load(model_path, map_location='cuda:0'))
test_label_true = torch.LongTensor()
test_label_pred = torch.LongTensor()
# Only one is extracted here batch To test , namely 15 A picture
for (val_image, val_label) in test_dataloader:
net.cuda()
out = net(val_image.cuda())
pred = out.argmax(dim=1).squeeze().data.cpu().numpy()
label = val_label.data.numpy()
output = F.log_softmax(out, dim=1)
pred = output.argmax(dim=1).data.cpu()
real = val_label.data.cpu()
test_label_true = torch.cat((test_label_true, real), dim=0)
test_label_pred = torch.cat((test_label_pred, pred), dim=0)
test_miou = miou_score(test_label_true.numpy(),
test_label_pred.numpy(), NUM_CLASSES)
print(" On test set miou by :" + str(test_miou))
val_pred, val_label = label2image(NUM_CLASSES)(pred, label)
for i in range(15):
val_imag = val_image[i]
val_pre = val_pred[i]
val_labe = val_label[i]
# Anti normalization
mean = [.485, .456, .406]
std = [.229, .224, .225]
x = val_imag
for j in range(3):
x[j] = x[j].mul(std[j])+mean[j]
img = x.mul(255).byte()
img = img.numpy().transpose((1, 2, 0)) # Original picture
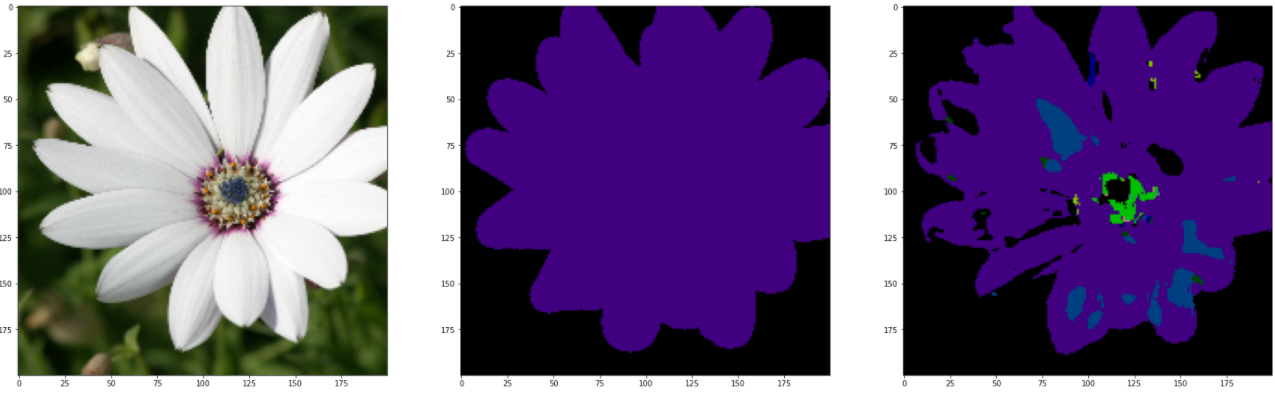
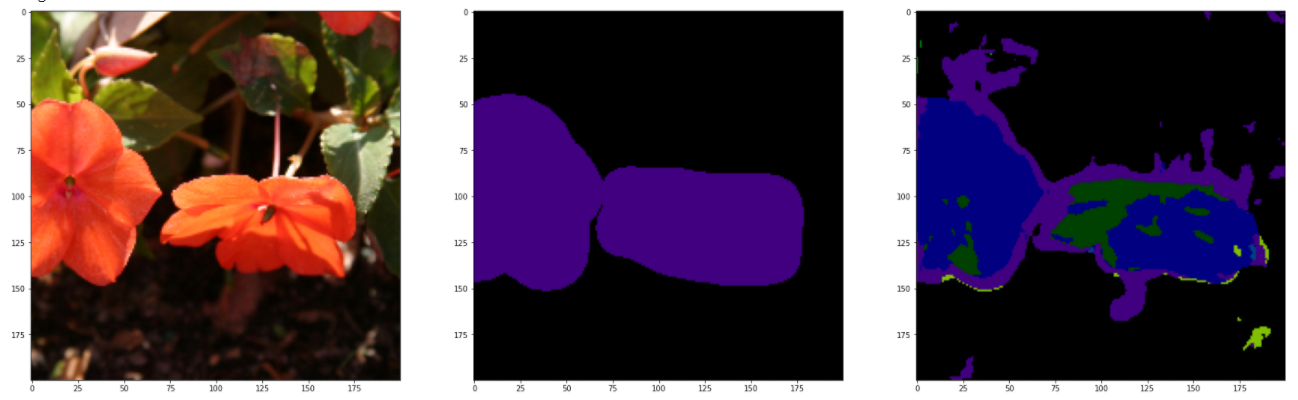
fig, ax = plt.subplots(1, 3, figsize=(30, 30))
ax[0].imshow(img)
ax[1].imshow(val_labe)
ax[2].imshow(val_pre)
plt.show()
plt.savefig('./pic_results/pic_UNet_{}.png'.format(i))
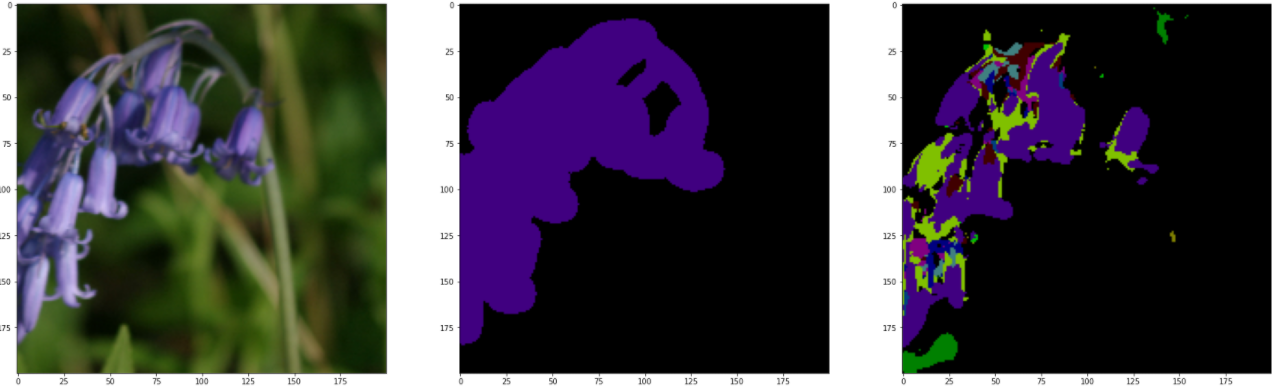
break
Theoretically , You should test with a test set , But the results of the test are unbearable . It may be caused by insufficient training times , In the above code , Directly import the training set to view , Here are and GroundTruth Compare with the reference figure .
Complete source code
Experiment source code +MSRC2 Data sets
https://pan.baidu.com/s/1WSgs1fVVfKL4poBFjhaBfA?pwd=8888
边栏推荐
- Niuke real problem programming - Day17
- 2. 堆排序『较难理解的排序』
- Five pain points for big companies to open source
- Bill Gates posted his resume 48 years ago: "it's not as good-looking as yours."
- IDA pro逆向工具寻找socket server的IP和port
- Read PG in data warehouse in one article_ stat
- What is the process of ⼀ objects from loading into JVM to being cleared by GC?
- "Baidu Cup" CTF competition 2017 February, web:include
- Bits and Information & integer notes
- Navigation — 这么好用的导航框架你确定不来看看?
猜你喜欢
Niuke real problem programming - Day10

Mathematical modeling -- what is mathematical modeling

Ctfshow, information collection: web9
Discussion on CPU and chiplet Technology
Wechat applet - Advanced chapter component packaging - Implementation of icon component (I)
Win10 or win11 taskbar, automatically hidden and transparent
![leetcode:648. Word replacement [dictionary tree board + find the shortest matching prefix among several prefixes]](/img/3e/cdde4b436821af8700eb65d35e8f59.png)
leetcode:648. Word replacement [dictionary tree board + find the shortest matching prefix among several prefixes]
Introduction and use of Kitti dataset
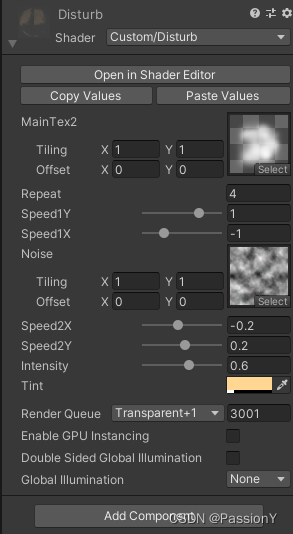
Unity之ASE实现全屏风沙效果
Apache multiple component vulnerability disclosure (cve-2022-32533/cve-2022-33980/cve-2021-37839)
随机推荐
Read PG in data warehouse in one article_ stat
Niuke real problem programming - day13
Summer safety is very important! Emergency safety education enters kindergarten
leetcode:648. Word replacement [dictionary tree board + find the shortest matching prefix among several prefixes]
How bad can a programmer be? Nima, they are all talents
用于增强压缩视频质量的可变形卷积密集网络
广州开发区让地理标志产品助力乡村振兴
CTFshow,信息搜集:web3
【OBS】RTMPSockBuf_Fill, remote host closed connection.
FFmpeg----图片处理
Shengteng experience officer Episode 5 notes I
[server data recovery] data recovery case of raid failure of a Dell server
Ctfshow, information collection: web10
How does the database perform dynamic custom sorting?
【搞船日记】【Shapr3D的STL格式转Gcode】
CTFshow,信息搜集:web10
Unity之ASE实现卡通火焰
IDA pro逆向工具寻找socket server的IP和port
STM32F103C8T6 PWM驱动舵机(SG90)
Niuke real problem programming - day18