当前位置:网站首页>Unity UGUI不同的UI面板或者UI之间如何进行坐标匹配和变换
Unity UGUI不同的UI面板或者UI之间如何进行坐标匹配和变换
2022-07-05 06:53:00 【稳中有序】
并不是直接操控AnchorPosition,只需要都换算到世界坐标下即可,比如让一个UI的坐标等于另外一个UI,就可以获得这个UI的世界坐标赋值给另外一个UI的世界坐标,如果要右移一点就+0.1
边栏推荐
- Skywalking全部
- 【软件测试】04 -- 软件测试与软件开发
- SolidWorks template and design library are convenient for designers to call
- 能量守恒和打造能量缺口
- Empire help
- Ros2 - function package (VI)
- SOC_SD_DATA_FSM
- MySQL setting trigger problem
- Technical conference arrangement
- Sum of two numbers, the numbers in the array are converted to decimal, added, and output inversely
猜你喜欢
ROS2——配置开发环境(五)
【软件测试】04 -- 软件测试与软件开发
ROS2——Service服务(九)

Qt项目中的日志库log4qt使用

Vant weapp swippecell set multiple buttons
Record of problems in ollvm compilation
cgroup_ memcg
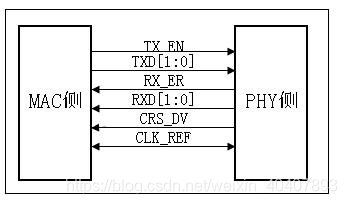
扫盲-以太网MII接口类型大全-MII、RMII、SMII、GMII、RGMII、SGMII、XGMII、XAUI、RXAUI

MySQL (UDF authorization)
![[Gaode map POI stepping pit] amap Placesearch cannot be used](/img/4c/55586ffcc2267c477a4532ab51a0c1.png)
[Gaode map POI stepping pit] amap Placesearch cannot be used
随机推荐
ethtool 原理介绍和解决网卡丢包排查思路(附ethtool源码下载)
H5 module suspension drag effect
Rehabilitation type force deduction brush question notes D3
ROS2——ROS2对比ROS1(二)
inux摄像头(mipi接口)简要说明
Huawei bracelet, how to add medicine reminder?
Ros2 - common command line (IV)
GDB code debugging
vim
La redirection de l'applet Wechat ne déclenche pas onload
Application of recyclerview
ROS2——配置开发环境(五)
Executealways of unity is replacing executeineditmode
C语言数组专题训练
PHY驱动调试之 --- MDIO/MDC接口22号和45号条款(一)
namespace
[Gaode map POI stepping pit] amap Placesearch cannot be used
摄像头的MIPI接口、DVP接口和CSI接口
[algorithm post interview] interview questions of a small factory
Page type