当前位置:网站首页>ROS2——配置开发环境(五)
ROS2——配置开发环境(五)
2022-07-05 06:35:00 【我与nano】
ROS2机器人操作系统
前言
ROS机器人开发肯定离不开代码编写,我们课程中会给大家提供大量示例源码,这些代码如何查看、编写、编译呢?我们需要先做一些准备,完成开发环境的配置,给大家推荐两款重要的开发工具——vscode和git。
一、GIT
git是一个版本管理软件,也是因Linux而生。
sudo apt install git
二、安装vscode
1.安装软件
sudo dpkg -i deb文件名
下面安装一些常用的插件,这些在VS中都很简单
中文语言包
Python插件
C++插件
CMake插件
vscode-icons
ROS插件
Msg Language Support
Visual Studio IntelliCode
URDF
Markdown All in One
边栏推荐
- Huawei bracelet, how to add medicine reminder?
- ollvm编译出现的问题纪录
- Vant weapp swippecell set multiple buttons
- H5 embedded app adapts to dark mode
- Integer to 8-bit binary explanation (including positive and negative numbers) scope of application -127~+127
- Positive height system
- Vant Weapp SwipeCell設置多個按鈕
- 3. Oracle control file management
- The problem of Chinese garbled code in the vscode output box can be solved once for life
- [Gaode map POI stepping pit] amap Placesearch cannot be used
猜你喜欢

Volcano resource reservation feature
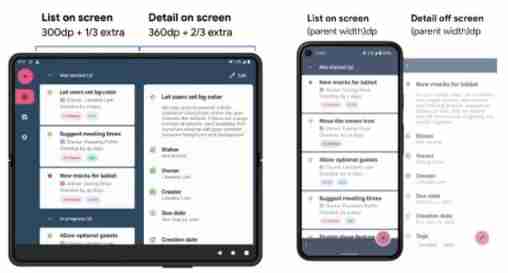
Design specification for mobile folding screen
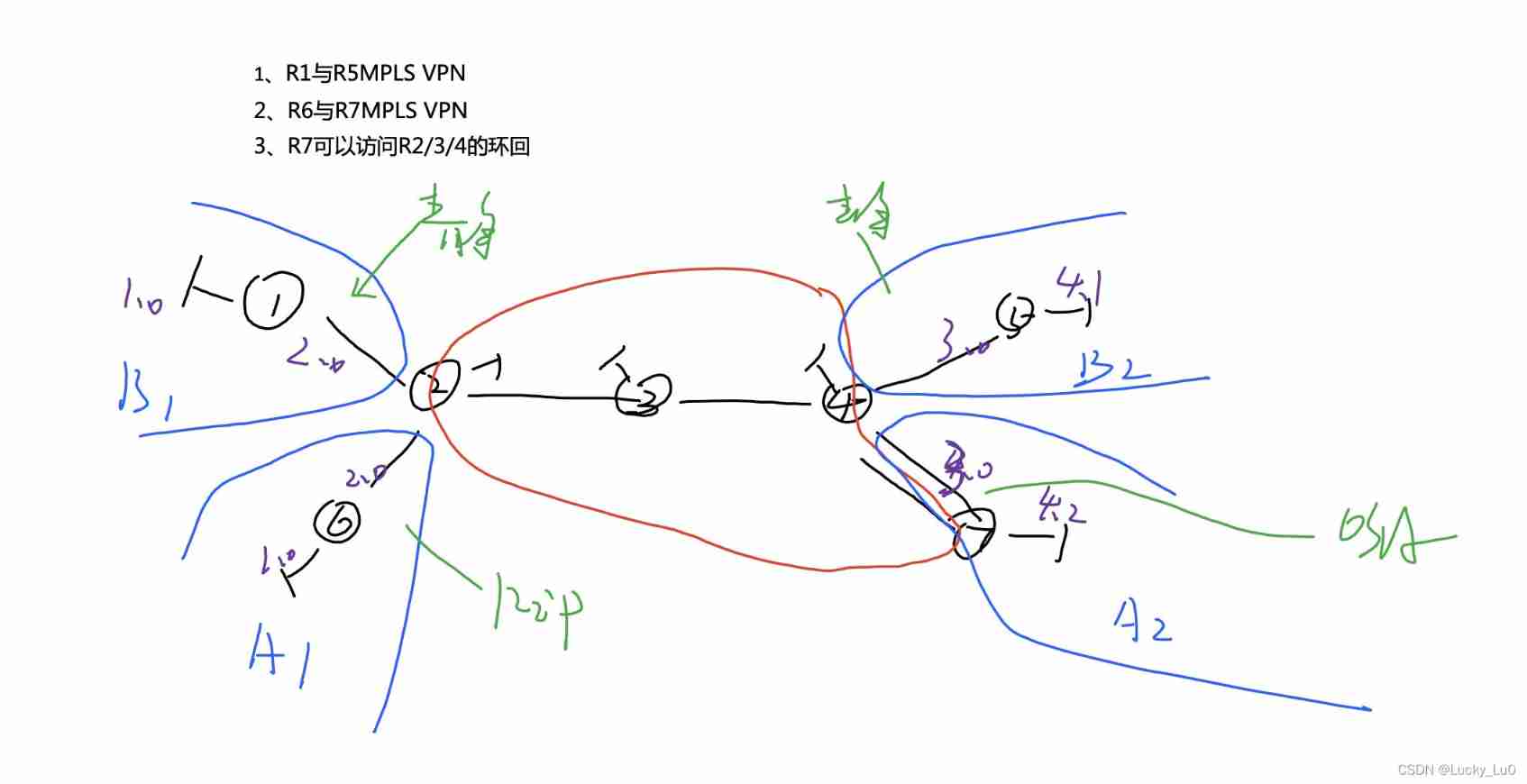
MPLS experiment
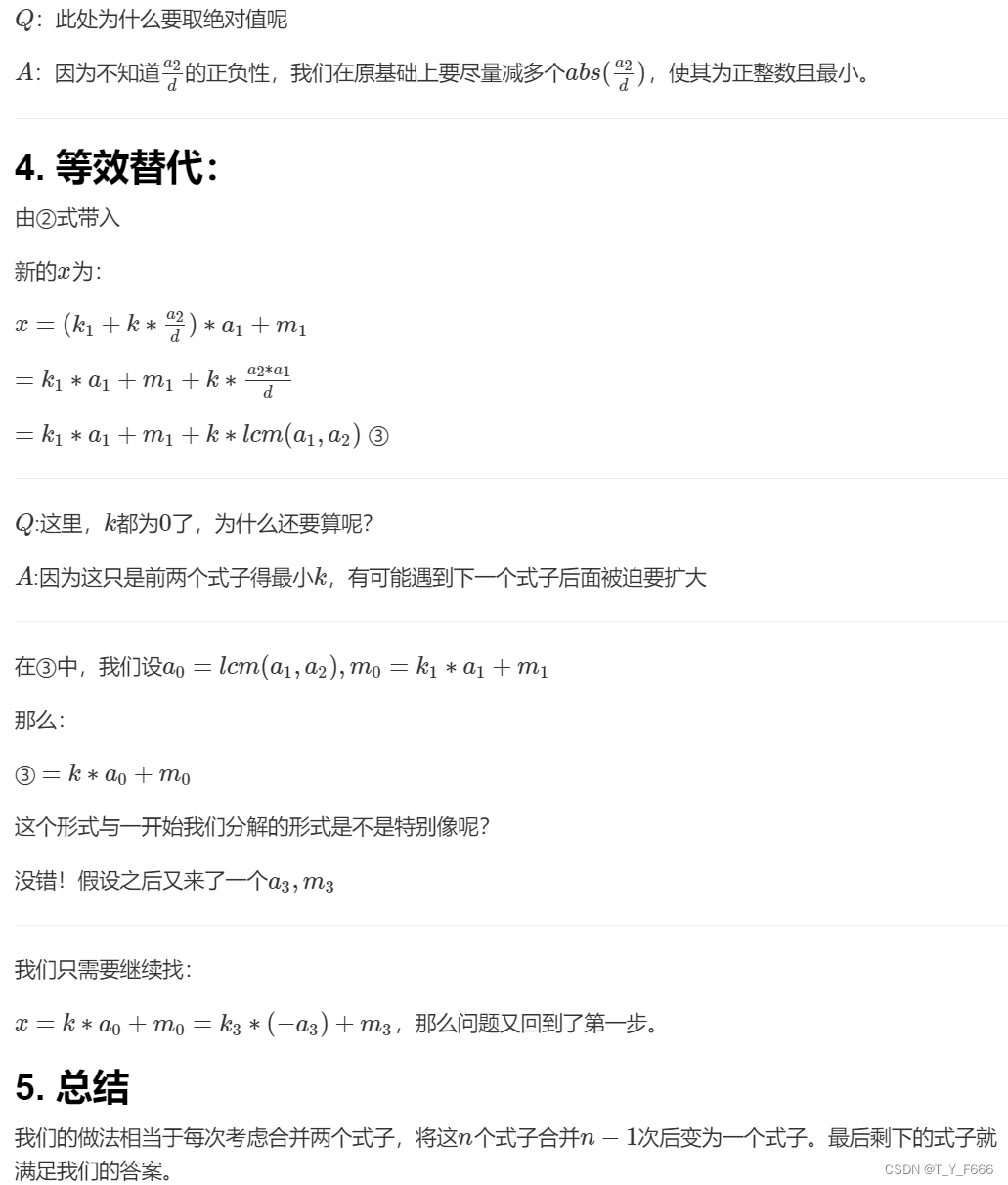
Chinese remainder theorem acwing 204 Strange way of expressing integers
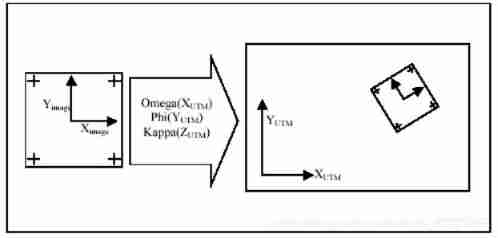
A brief introduction to heading/pitch/roll and omega/phi/kappa

Find the combination number acwing 888 Find the combination number IV

Vant Weapp SwipeCell設置多個按鈕
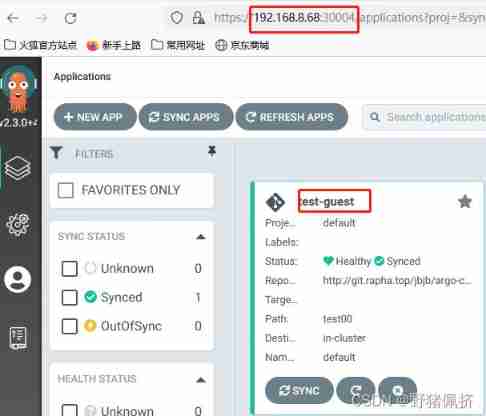
Client use of Argo CD installation

namespace
Skywalking all
随机推荐
Positive height system
Huawei bracelet, how to add medicine reminder?
Find the combination number acwing 889 01 sequence meeting conditions
H5 module suspension drag effect
Vant Weapp SwipeCell设置多个按钮
[nvidia] CUDA_ VISIBLE_ DEVICES
H5 模块悬浮拖动效果
GDB code debugging
NVM Downloading npm version 6.7.0... Error
The differences and connections among cookies, sessions, JWT, and tokens
PHY驱动调试之 --- PHY控制器驱动(二)
confidential! Netease employee data analysis internal training course, white whoring! (attach a data package worth 399 yuan)
The problem of Chinese garbled code in the vscode output box can be solved once for life
vim
Sum of two numbers, the numbers in the array are converted to decimal, added, and output inversely
Technical conference arrangement
Marvell 88E1515 PHY loopback模式测试
Client use of Argo CD installation
Rehabilitation type force deduction brush question notes D3
摄像头的MIPI接口、DVP接口和CSI接口