当前位置:网站首页>基于数据驱动的变电站巡检机器人自抗扰控制
基于数据驱动的变电站巡检机器人自抗扰控制
2022-08-02 00:02:00 【米朵儿技术屋】
摘要: 针对在变电站巡检机器人自抗扰控制(active disturbance rejection control,ADRC)系统中,不准确的控制输入矩阵会对控制性能产生影响的问题,提出一种基于数据驱动方法补偿的自抗扰控制架构.首先,给出巡检机器人离散时间动力学模型.其次,通过扩张状态观测器观测未建模动态、参数误差、摩擦力等不确定性,并根据机器人动力学模型设计ADRC控制器.然后将ADRC系统和机器人系统看作一个整体,使用数据驱动无模型自适应控制(model-free adaptive contr
边栏推荐
猜你喜欢
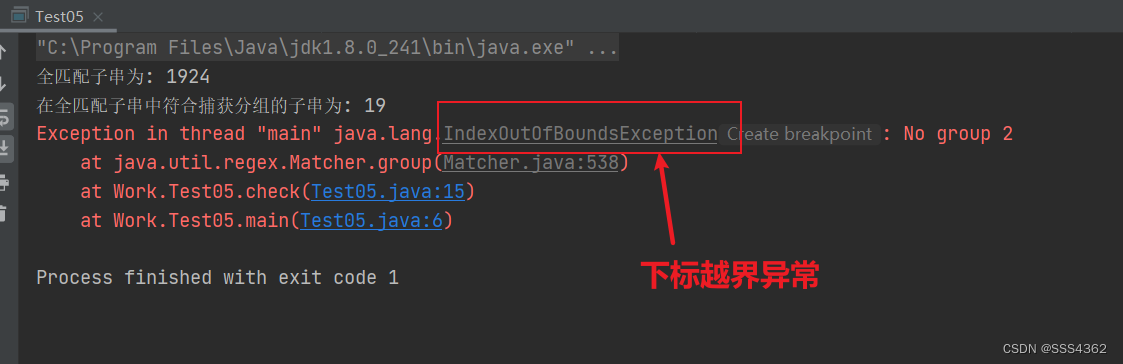
解析正则表达式的底层实现原理

REST会消失吗?事件驱动架构如何搭建?

【三子棋】C语言实现简易三子棋

在MySQL登录时出现Access denied for user ‘root‘@‘localhost‘ (using password YES) 拒绝访问问题解决

Win10安装DBeaver连接MySQL8、导入和导出数据库详细教程
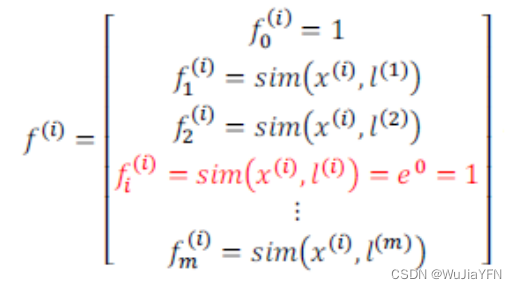
22. The support vector machine (SVM), gaussian kernel function

security CSRF漏洞保护

Docker实践经验:Docker 上部署 mysql8 主从复制

Win11如何获得最佳电源效率?

短视频SEO优化教程 自媒体SEO优化技巧方法
随机推荐
Async/await principle and execution sequence analysis
Keepalived 高可用的三种路由方案
How to get the best power efficiency in Windows 11?
Win11内存管理错误怎么办?
20220725 Information update
短视频SEO搜索运营获客系统功能介绍
asyncawait和promise的区别
Wincc报表教程(SQL数据库的建立,wincc在数据库中保存和查询数据,调用Excel模板把数据保存到指定的位置和打印功能)
go语言标准库fmt包怎么使用
After an incomplete recovery, the control file has been created or restored, the database must be opened with RESETLOGS, interpreting RESETLOGS.
【MySQL系列】MySQL数据库基础
Excel文件读写(创建与解析)
Artifact XXXwar exploded Artifact is being deployed, please wait...(已解决)
检查 Oracle 版本的 7 种方法
学习英语的网站与资料
控制电机的几种控制电路原理图
Task execution control in Ansible
07-SDRAM: FIFO control module
background-image使用
contentEditable属性