当前位置:网站首页>SAP HR奖罚信息导出
SAP HR奖罚信息导出
2022-07-07 21:52:00 【gavingxh】
select PERNR PA0001~SNAME ZJFLB a~DDTEXT ZJFJB b~DDTEXT ZJFDW ZJFYY ZJFMC
from pa0001
join PA9106 on Pa9106~pernr = Pa0001~pernr
join DD07V as a on a~DOMNAME = 'ZD_HRJFLB' and a~DDLANGUAGE = '1' and a~DOMVALUE_L = pa9106~ZJFLB
join DD07V as b on b~DOMNAME = 'ZD_HRJFJB' and b~DDLANGUAGE = '1' and b~DOMVALUE_L = pa9106~ZJFJB
where pa0001~ENDDA > sy-datum 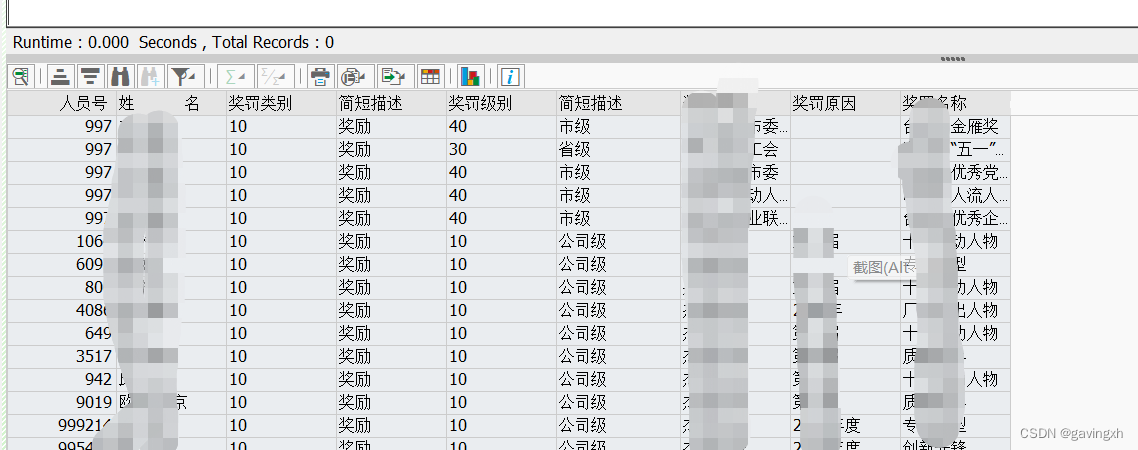
边栏推荐
- Adults have only one main job, but they have to pay a price. I was persuaded to step back by personnel, and I cried all night
- 进度播报|广州地铁七号线全线29台盾构机全部完成始发
- Explain
- New potential energy of industrial integration, Xiamen station of city chain technology digital summit successfully held
- Happy gathering time
- Unity3d Learning Notes 6 - GPU instantiation (1)
- 在软件工程领域,搞科研的这十年!
- 包装行业智能供应链S2B2B商城解决方案:开辟电商消费新生态
- php 使用阿里云存储
- POJ2392 SpaceElevator [DP]
猜你喜欢
Unity3d learning notes 5 - create sub mesh
LDO稳压芯片-内部框图及选型参数

One week learning summary of STL Standard Template Library
【编译原理】词法分析设计实现

B_ QuRT_ User_ Guide(36)

B_QuRT_User_Guide(38)
RE1 attack and defense world reverse
进度播报|广州地铁七号线全线29台盾构机全部完成始发
js 获取对象的key和value

Install a new version of idea. Double click it to open it
随机推荐
家用电器行业渠道商协同系统解决方案:助力家电企业快速实现渠道互联网化
Matlab SEIR infectious disease model prediction
产业共融新势能,城链科技数字峰会厦门站成功举办
SRM supplier cloud collaborative management platform solution for building materials industry to realize business application scalability and configuration
B_QuRT_User_Guide(38)
Vs extension tool notes
Entity层、DAO层、Service层、Controller层 先后顺序
STL标准模板库(Standard Template Library)一周学习总结
Unity3d learning notes 5 - create sub mesh
Home appliance industry channel business collaboration system solution: help home appliance enterprises quickly realize the Internet of channels
电子设备行业智能供应链协同平台解决方案:解决低效, 赋能产业数字化升级
Unity3d learning notes 4 - create mesh advanced interface
Install a new version of idea. Double click it to open it
Dynamics 365 find field filtering
Windows set redis to start automatically
POJ2392 SpaceElevator [DP]
Caip2021 preliminary VP
CXF call reports an error. Could not find conduct initiator for address:
How to login and enable synchronization function in Google browser
B_ QuRT_ User_ Guide(36)