当前位置:网站首页>Learning note 24 - multi sensor post fusion technology
Learning note 24 - multi sensor post fusion technology
2022-07-02 01:17:00 【FUXI_ Willard】
This blog series includes 6 A column , Respectively :《 Overview of autopilot Technology 》、《 Technical foundation of autopilot vehicle platform 》、《 Autopilot positioning technology 》、《 Self driving vehicle environment perception 》、《 Decision and control of autonomous driving vehicle 》、《 Design and application of automatic driving system 》, The author is not an expert in the field of automatic driving , Just a little white on the road of exploring automatic driving , This series has not been read , It is also thinking while reading and summarizing , Welcome to friends , Please give your suggestions in the comments area , Help the author pick out the mistakes , thank you !
This column is about 《 Self driving vehicle environment perception 》 Book notes .
2. Multisensor post fusion technology
Post fusion technology : Each sensor outputs detection data information independently , After processing the data information of each sensor , Then fuse and summarize the final perception results .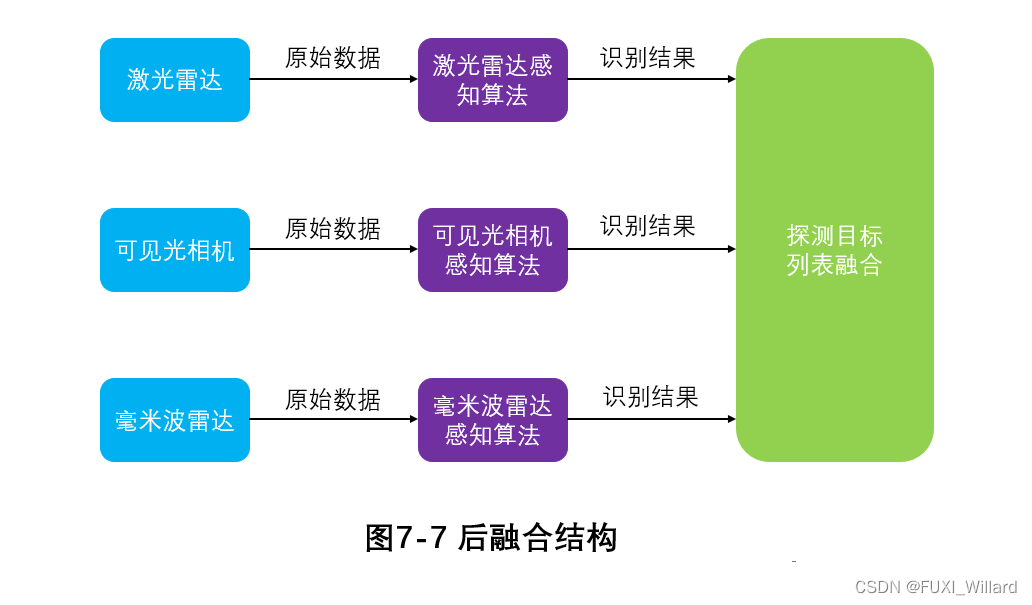
2.1 Ulm Autopilot : Modular fusion method
Ulm The University autonomous driving project proposes a modular 、 Sensor independent fusion method , Allow efficient sensor replacement , By mapping on the network 、 Multiple sensors are used in key modules such as location and tracking to ensure information redundancy . This algorithm is mainly applied to radar 、 camera 、 The detection information of the three sensors of the laser scanner is fused , Three stations IBEO LUX The laser scanner is mounted on the front bumper , The camera is mounted behind the windshield , And equipped with multiple radars .
The illustration above :
- Blue : Camera field of view ;
- Red : Laser scanner sensing range ;
- green : Radar sensing range ;
The algorithm proposes a hierarchical modular environment awareness system (HMEP), It contains three perception layers : Grid mapping 、 Location and target tracking ;
Each sensing layer will perform sensor fusion , And produce an environmental model result ; In addition to sensor data , The perception layer can also use the results of the previous layer , The order is improved according to the abstraction level of environment model elements ; The results of different perception layers may be redundant , Even contradictory , Therefore, the combination model combines all the results into a unified environment model .
- Grid mapping layer

The grid mapping layer divides the surrounding environment into a single grid cell , According to the classical occupancy grid mapping method, the proportion of each cell in the grid graph is estimated , The output result is the percentage probability of each cell ; The combination module mainly uses its output information to predict the boundary of the target object ;
Specifically : Based on sensor data , The inverse sensor model can predict the percentage probability of each cell , It is called measuring grid ; The mapping algorithm updates the grid mapping of the measurement grid by using binary Bayesian filter , And fuse the multi-sensor data into the grid mapping layer . - Positioning layer

Positioning layer fusion sensor detection data 、 Grid layer information and digital map , Output digital map with self positioning information ;
Specifically : In the grid diagram constructed by three laser scanners, the maximum stable extreme value region is used (Maximally Stable Extremal Regions,MSER) The extracted features , Features in the grid include tree trunks 、 Road signs, etc ; Display based on feature map , The positioning layer uses Monte Carlo to locate (Monte-Carlo Localization,MCL) Method to predict the target attitude . - Tracking layer

The tracking layer passes the radar 、 camera 、 Centralized fusion of lidar detection data realizes the perception of moving objects in the surrounding environment , The information from the grid mapping layer and the positioning layer can also be used to obtain the target orientation 、 Maximum speed and other information , So as to complete the task of multi-target tracking .
The fusion module uses a labeled dobernuli (Labeled Muti-Bernouli,LMB) Filter implementation , Output a list containing the spatial distribution and probability of existence of the target trajectory ; Tracking layer usage DempsterShafer Methods to realize sensor fusion perception , It can give full play to the advantages of each sensor , Avoid failure due to sensor limitations ; - Summary
The algorithm is proposed , For the future autonomous driving perception system , Its key technology is the ability to replace sensors without changing the core of the fusion system ; Each sensing layer provides a general sensor interface , It can merge additional sensors or replace existing sensors without changing the fusion core of the sensing system .
Its modular structure is helpful for the replacement of sensors , And the sensor independent interface is mapped in the network 、 The application of positioning and tracking module makes it unnecessary to make any adjustment to the fusion algorithm to modify the sensor settings .
2.2 FOP-MOC Model
Chavez-Garcia And so forth FOP-MOC Model , Take the classification information of the target as the key element of sensor fusion , The method based on evidence framework is used as the sensor fusion algorithm , It mainly solves the problem of sensor data association 、 The problem of sensor fusion .
Low level integration in SLAM Module ; The detection layer fuses the target list detected by each sensor ; The tracking layer integrates the track list of each sensor module tracking the target , To generate the final result .FOP-MOC Sensor fusion is carried out at the detection layer to improve the sensing ability of the sensing system .
FOP-MOC Model , The input information of the fusion model is : radar 、 camera 、 List of lidar detection targets , The output result is the target detection information after fusion , And send it to the tracking module ; The detection data of radar and lidar are mainly used for moving target detection , The images collected by the camera are mainly used for target classification , Each target is determined by its location 、 Size 、 The evidence distribution of Category Hypothesis , The category information is the shape from the detection result 、 Relative speed and visual appearance .
边栏推荐
- King combat power query renamed toolbox applet source code - with traffic main incentive advertisement
- JMeter做接口测试,如何提取登录Cookie
- Leetcode 45 Jumping game II (2022.02.14)
- Global and Chinese market of avionics systems 2022-2028: Research Report on technology, participants, trends, market size and share
- "C zero foundation introduction hundred knowledge hundred examples" (73) anonymous function -- lambda expression
- UDS bootloader of s32kxxx bootloader
- [IVX junior engineer training course 10 papers] 04 canvas and a group photo of IVX and me
- About asp Net core uses a small detail of datetime date type parameter
- [eight sorting ③] quick sorting (dynamic graph deduction Hoare method, digging method, front and back pointer method)
- 教你白嫖Amazon rds一年并搭建MySQL云数据库(只需10分钟,真香)
猜你喜欢

JMeter做接口测试,如何提取登录Cookie
XMIND mind map
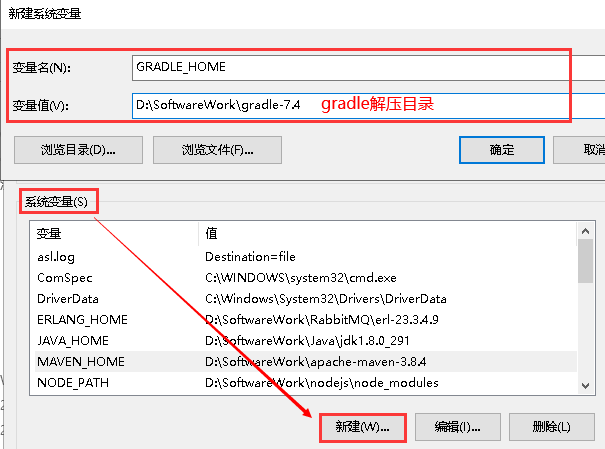
gradle
![[WesternCTF2018]shrine writeup](/img/26/1700095c9b38b9b74a1b1136e5d5de.jpg)
[WesternCTF2018]shrine writeup
Design and control of multi rotor aircraft (VII) -- sensor calibration and measurement model
Powerful calendar wechat applet source code - support the main mode of doing more traffic

Minimize the error

We should make clear the branch prediction

首场“移动云杯”空宣会,期待与开发者一起共创算网新世界!

Viewing and modifying volume group attributes of Aix storage management (II)
随机推荐
SSO single sign on implementation.
ACM教程 - 快速排序(常规 + 尾递归 + 随机基准数)
[eight sorts ②] select sort (select sort, heap sort)
[eight sorts ①] insert sort (direct insert sort, Hill sort)
[IVX junior engineer training course 10 papers] 05 canvas and aircraft war game production
cookie、session、tooken
GL Studio 5 安装与体验
[WesternCTF2018]shrine writeup
JMeter做接口测试,如何提取登录Cookie
Global and Chinese markets of edge AI software 2022-2028: Research Report on technology, participants, trends, market size and share
Study note 2 -- definition and value of high-precision map
Circular statements in shell programming
Comprehensive broadcast of global and Chinese markets 2022-2028: Research Report on technology, participants, trends, market size and share
What skills does an excellent software tester need to master?
The author is more willing to regard industrial Internet as a concept much richer than consumer Internet
Bubble Sort Graph
[IVX junior engineer training course 10 papers] 02 numerical binding and adaptive website production
UDS bootloader of s32kxxx bootloader
We should make clear the branch prediction
Global and Chinese market of wireless charging magnetic discs 2022-2028: Research Report on technology, participants, trends, market size and share