当前位置:网站首页>【Camera专题】Camera dtsi 完全解析
【Camera专题】Camera dtsi 完全解析
2022-07-03 01:21:00 【c枫_撸码的日子】
一、唠嗑
说来惭愧,搬砖也有一段时间了,dtsi里面有些配置还没弄清楚含义,
作为一个咸鱼的搬砖行家,就研究一下吧!
二、知识点
平台:8909
主要参考kernel/Documentation/devicetree/bindings/media/video/msm-cci.txt的注释,加上自我的理解!
1. sensor配置
qcom,[email protected]0 {
cell-index = <0>;
compatible = "qcom,camera";
reg = <0x2>;
qcom,csiphy-sd-index = <0>;
qcom,csid-sd-index = <0>;
qcom,mount-angle = <90>;
qcom,eeprom-src = <&eeprom0>;
qcom,actuator-src = <&actuator0>;
qcom,led-flash-src = <&led_flash0>;
cam_vana-supply = <&pm8916_l2>;
cam_vdig-supply = <&pm8916_s3>;
cam_vio-supply = <&pm8916_l10>;
cam_vaf-supply = <&pm8916_l11>;
qcom,cam-vreg-name = "cam_vana","cam_vdig","cam_vio", "cam_vaf";
qcom,cam-vreg-type = <0 0 0 0>;
qcom,cam-vreg-min-voltage = <2800000 1500000 1800000 2800000>;
qcom,cam-vreg-max-voltage = <2800000 1500000 1800000 2800000>;
qcom,cam-vreg-op-mode = <200000 100000 80000 100000>;
pinctrl-names = "cam_default", "cam_suspend";
pinctrl-0 = <&cam_sensor_mclk0_default &cam_sensor_rear_default>;
pinctrl-1 = <&cam_sensor_mclk0_sleep &cam_sensor_rear_sleep>;
gpios = <&msm_gpio 26 0>,
<&msm_gpio 29 0>,
<&msm_gpio 33 0>;
qcom,gpio-reset = <1>;
qcom,gpio-standby = <2>;
qcom,gpio-req-tbl-num = <0 1 2>;
qcom,gpio-req-tbl-flags = <1 0 0>;
qcom,gpio-req-tbl-label = "CAMIF_MCLK",
"CAM_RESET0",
"CAM_STANDBY";
qcom,sensor-position = <0>;
qcom,sensor-mode = <0>;
qcom,cci-master = <0>;
status = "ok";
clocks = <&clock_gcc clk_mclk0_clk_src>,
<&clock_gcc clk_gcc_camss_mclk0_clk>;
clock-names = "cam_src_clk", "cam_clk";
};
1. cell-index = <0>;
唯一标识,用来区分多个摄像头。
源码:
kernel/drivers/media/platform/msm/camera_v2/sensor/msm_sensor_driver.c
static int32_t msm_sensor_driver_get_dt_data(struct msm_sensor_ctrl_t *s_ctrl){
···
/* * Read cell index - this cell index will be the camera slot where * this camera will be mounted */
rc = of_property_read_u32(of_node, "cell-index", &cell_id);
if (rc < 0) {
pr_err("failed: cell-index rc %d", rc);
goto FREE_SENSOR_DATA;
}
s_ctrl->id = cell_id;
···
}
按照这里的英文注释,cell index标识camera安装的位置,这个值只要唯一即可!
2. compatible = “qcom,camera”;
匹配节点,驱动和设备的compatible属性相同时,才会调用probe函数。
dtsi里面配置就是设备,下面的源码对应的就是驱动,这两个属性相同。
源码:
kernel/drivers/media/platform/msm/camera_v2/sensor/msm_sensor_driver.c
static const struct of_device_id msm_sensor_driver_dt_match[] = {
{
.compatible = "qcom,camera"},
{
}
};
MODULE_DEVICE_TABLE(of, msm_sensor_driver_dt_match);
static struct platform_driver msm_sensor_platform_driver = {
.probe = msm_sensor_driver_platform_probe,
.driver = {
.name = "qcom,camera",
.owner = THIS_MODULE,
.of_match_table = msm_sensor_driver_dt_match,
},
.remove = msm_sensor_platform_remove,
};
3. reg = <0x2>;
i2c地址,从经验来看,只要配置成唯一即可,不过还是推荐配成i2c地址!
未找到源码调用的位置
4. qcom,csiphy-sd-index = <0>;
用于接收传感器数据的csiphy实例,
可以配置的值:0,1,2
源码:
kernel/drivers/media/platform/msm/camera_v2/sensor/io/msm_camera_dt_util.c

5. qcom,csid-sd-index = <0>;
用于接收传感器数据的csid核心实例
可以配置的值:0,1,2
源码:
kernel/drivers/media/platform/msm/camera_v2/sensor/io/msm_camera_dt_util.c
6. qcom,mount-angle = <90>;
摄像头在设备上的物理安装角度
可以配置的值:0,90,180,360
一般来说 sensor raw图默认的方向都是90或者270!
7. qcom,eeprom-src = <&eeprom0>;
如果支持otp(eeprom)的话,就配置成各种的eeprom节点,否则不配置。
8. qcom,actuator-src = <&actuator0>;
如果支持马达的话,就配置成各自的马达节点,否则不配置。
9. qcom,led-flash-src = <&led_flash0>;
如果支持闪光灯的话,就配置成各自的闪光灯节点,否则不配置。
10. cam_vana-supply = <&pm8916_l2>;
avdd供电,是否是要配置,配置成哪路系统供电,需要和硬件沟通!
11. cam_vdig-supply = <&pm8916_s3>;
dvdd供电,是否是要配置,配置成哪路系统供电,需要和硬件沟通!
12. cam_vio-supply = <&pm8916_l10>;
iovdd供电,是否是要配置,配置成哪路系统供电,需要和硬件沟通!
13. cam_vaf-supply = <&pm8916_l11>;
马达供电,是否是要配置,配置成哪路系统供电,需要和硬件沟通!
14. qcom,cam-vreg-name等
qcom,cam-vreg-name = “cam_vana”,“cam_vdig”,“cam_vio”, “cam_vaf”;
配置sensor需要的所有电源。
可配置选项:“cam_vdig”, “cam_vana”, “cam_vio”, “cam_vaf”
分别代表含义:dvdd,avdd,iovdd,af供电
不一定要全部配置,用到哪路配哪路,有些电路硬件自己拉高了,具体跟硬件沟通。qcom,cam-vreg-type = <0 0 0 0>;
指定用于此sensor的电源类型,1表示不使用,0表示使用。
默认配0.
其他配置参考
171 qcom,cam-vreg-type = <0 1>;
172 qcom,cam-vreg-min-voltage = <1200000 0>;
173 qcom,cam-vreg-max-voltage = <1200000 0>;
qcom,cam-vreg-min-voltage = <2800000 1500000 1800000 2800000>;
供电电源的最大值,单位mV
第一个dvdd最大值为2800000mA=2.8V,其他同理qcom,cam-vreg-max-voltage = <2800000 1500000 1800000 2800000>;
供电电源的最小值,单位mV
第一个dvdd最小值为2800000mA=2.8V,其他同理qcom,cam-vreg-op-mode = <200000100000 80000 100000>;
供电电源的最佳电压水平。
比如第一个dvdd最佳电压水平为200000
常用值:200000 100000 105000 80000 0
这个节点没有完全理解。
注意:
qcom,cam-vreg-name = "cam_vana","cam_vdig","cam_vio", "cam_vaf";
qcom,cam-vreg-type = <0 0 0 0>;
qcom,cam-vreg-min-voltage = <2800000 1500000 1800000 2800000>;
qcom,cam-vreg-max-voltage = <2800000 1500000 1800000 2800000>;
qcom,cam-vreg-op-mode = <200000 100000 80000 100000>;
这些值分别是按顺序一一对应的!
15. pinctrl-names pinctrl-0 pinctrl-1
pinctrl-names = "cam_default", "cam_suspend";
pinctrl-0 = <&cam_sensor_mclk0_default &cam_sensor_rear_default>;
pinctrl-1 = <&cam_sensor_mclk0_sleep &cam_sensor_rear_sleep>;
这个也是按照顺序一一对应的。
- pinctrl-names = “cam_default”, “cam_suspend”;
默认就这么配置,前面代表clk,后面代表reset脚和standby脚,唤醒作用。

kernel/drivers/media/platform/msm/camera_v2/sensor/io/msm_camera_dt_util.c
static int msm_camera_pinctrl_init(struct msm_camera_power_ctrl_t *ctrl)
{
struct msm_pinctrl_info *sensor_pctrl = NULL;
sensor_pctrl = &ctrl->pinctrl_info;
sensor_pctrl->pinctrl = devm_pinctrl_get(ctrl->dev);
···
sensor_pctrl->gpio_state_active =
pinctrl_lookup_state(sensor_pctrl->pinctrl,
CAM_SENSOR_PINCTRL_STATE_DEFAULT);
···
sensor_pctrl->gpio_state_suspend
= pinctrl_lookup_state(sensor_pctrl->pinctrl,
CAM_SENSOR_PINCTRL_STATE_SLEEP);
···
return 0;
}
- pinctrl-0 = <&cam_sensor_mclk0_default &cam_sensor_rear_default>;
kernel/arch/arm/boot/dts/qcom/msm8909-pinctrl-i18.dtsi
/*sensors */
cam_sensor_mclk0_default: cam_sensor_mclk0_default {
/* MCLK0 */
mux {
/* CLK, DATA */
pins = "gpio26";
function = "cam_mclk";
};
config {
pins = "gpio26";
bias-disable; /* No PULL */
drive-strength = <2>; /* 2 MA */
};
};
cam_sensor_rear_default: cam_sensor_rear_default {
/* RESET, STANDBY */
mux {
pins = "gpio29", "gpio33";
function = "gpio";
};
config {
pins = "gpio29","gpio33";
bias-disable; /* No PULL */
drive-strength = <2>; /* 2 MA */
};
};
这里的gpio配置成多少,和硬件沟通
pinctrl-1 = <&cam_sensor_mclk0_sleep &cam_sensor_rear_sleep>;
cam_sensor_mclk0_sleep: cam_sensor_mclk0_sleep {
/* MCLK0 */
mux {
/* CLK, DATA */
pins = "gpio26";
function = "cam_mclk";
};
config {
pins = "gpio26";
bias-pull-down; /* PULL DOWN */
drive-strength = <2>; /* 2 MA */
};
};
cam_sensor_rear_sleep: cam_sensor_rear_sleep {
/* RESET, STANDBY */
mux {
pins = "gpio29","gpio33";
function = "gpio";
};
config {
pins = "gpio29","gpio33";
bias-disable; /* No PULL */
drive-strength = <2>; /* 2 MA */
};
};
这里的gpio配置成多少,和硬件沟通
16. gpio相关
gpios = <&msm_gpio 26 0>,
<&msm_gpio 29 0>,
<&msm_gpio 33 0>;
qcom,gpio-reset = <1>;
qcom,gpio-standby = <2>;
qcom,gpio-req-tbl-num = <0 1 2>;
qcom,gpio-req-tbl-flags = <1 0 0>;
qcom,gpio-req-tbl-label = "CAMIF_MCLK","CAM_RESET0","CAM_STANDBY";
这里分别是一一对应的
比如:
26 对应 CAMIF_MCLK
29 对应 CAM_RESET0
33 对应 CAM_STANDBY
qcom,gpio-reset = <1>;
传感器 reset脚的索引,这里是1qcom,gpio-standby = <2>
传感器 standby脚的索引,这里是2qcom,gpio-req-tbl-num = <0 1 2>;
mclk,reset,stanby的索引,由于mclk为0,qcom,gpio-reset = <1>,qcom,gpio-standby = <2>
因此配置成 <0,1,2>qcom,gpio-req-tbl-flags = <1 0 0>;
gpio的方向,mclk为1,表示输出,reset和standby为0,表示输入。qcom,gpio-req-tbl-label
gpio的名称。
常用值:
“CAMIF_MCLK”, “CAM_RESET”,“CAM_STANDBY”;
“CAMIF_MCLK0”, “CAM_RESET0”,“CAM_STANDBY0”;
“CAMIF_MCLK1”, “CAM_RESET1”,“CAM_STANDBY1”;
“CAMIF_MCLK2”, “CAM_RESET2”,“CAM_STANDBY2”;
17. qcom,sensor-position = <0>;
camera位置。
- 0-后摄
- 1-前摄
- 0x100-副摄(目前只有后摄有副摄,前摄暂时没有)
18. qcom,sensor-mode = <0>;
传感器模式支持
- 0 -> back camera 2D
- 1 -> front camera 2D
- 2 -> back camera 3D
- 3 -> back camera int 3D
19. qcom,cci-master = <0>;
sensor使用的master id。
可选值:
- 0 -> MASTER 0
- 1 -> MASTER 1
20. clocks相关
clocks = <&clock_gcc clk_mclk0_clk_src>,
<&clock_gcc clk_gcc_camss_mclk0_clk>;
clock-names = "cam_src_clk", "cam_clk";
- clocks
设备使用的时钟
30 clock_gcc: qcom,[email protected]1800000 {
31 compatible = "qcom,dummycc";
32 #clock-cells = <1>;
33 };
#define clk_mclk0_clk_src 0x266b3853
#define clk_mclk1_clk_src 0xa73cad0c
#define clk_mclk2_clk_src 0x42545468
#define clk_mclk3_clk_src 0x2bfbb714
- clock-names
设备所需时钟的名称
99static struct msm_cam_clk_info cam_8974_clk_info[] = {
100 [SENSOR_CAM_MCLK] = {
"cam_src_clk", 24000000},
101 [SENSOR_CAM_CLK] = {
"cam_clk", 0},
102};
Stay Hungry,Stay Foolish !
边栏推荐
- One of the C language practical projects is greedy snake
- 數學知識:臺階-Nim遊戲—博弈論
- [shutter] animation animation (animatedbuilder animation use process | create animation controller | create animation | create components for animation | associate animation with components | animatio
- [data mining] task 5: k-means/dbscan clustering: double square
- [untitled]
- How is the mask effect achieved in the LPL ban/pick selection stage?
- [data mining] task 4:20newsgroups clustering
- Wireshark data analysis and forensics a.pacapng
- "Jetpack - livedata parsing"
- Installation and use of serial port packet capturing / cutting tool
猜你喜欢
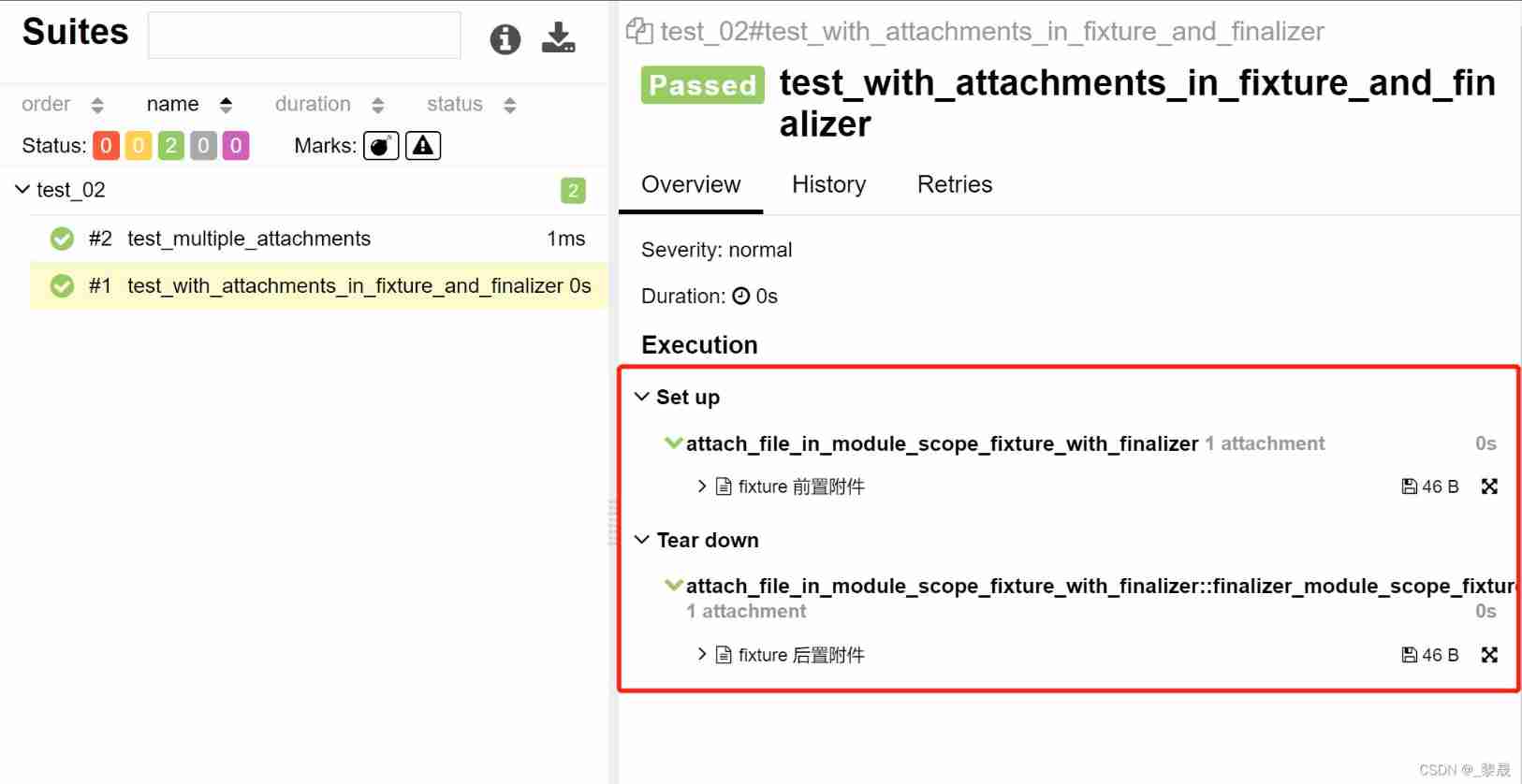
Pytest learning notes (12) -allure feature · @allure Step () and allure attach
![[data mining] task 6: DBSCAN clustering](/img/af/ad7aa523b09884eee967c6773a613f.png)
[data mining] task 6: DBSCAN clustering

High resolution network (Part 1): Principle Analysis

【面试题】1369- 什么时候不能使用箭头函数?

【数据挖掘】任务2:医学数据库MIMIC-III数据处理
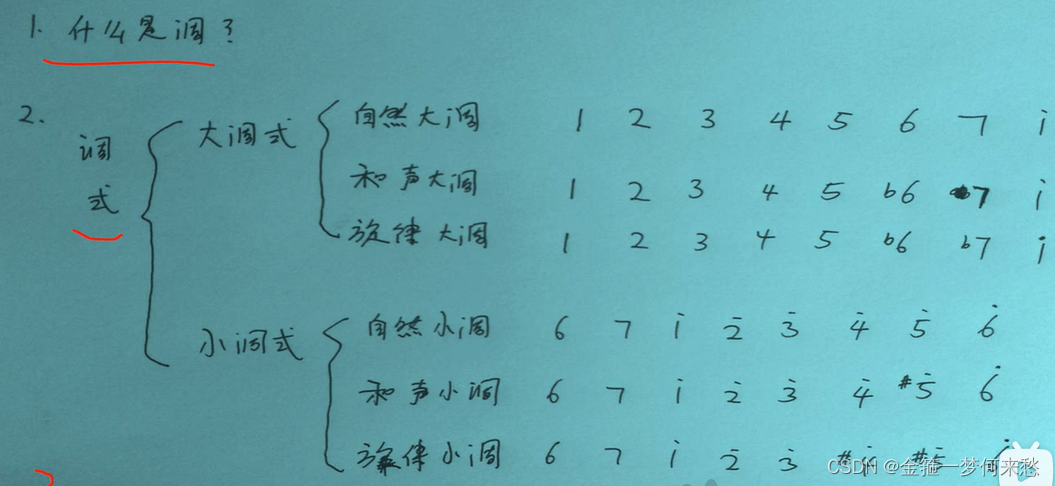
What is tone. Diao's story
Tâche 6: regroupement DBSCAN
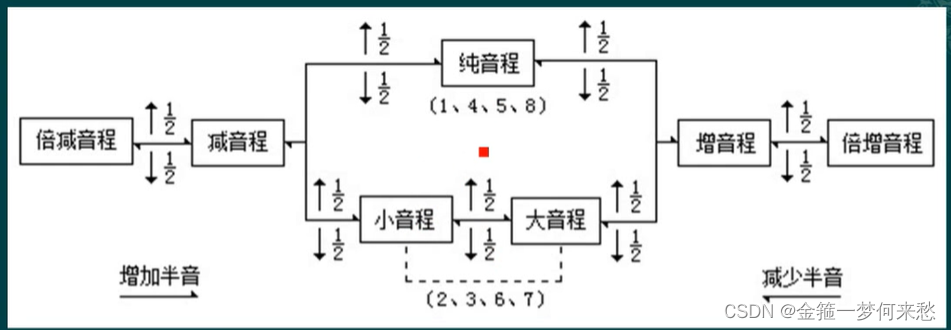
音程的知识的总结
![[principles of multithreading and high concurrency: 2. Solutions to cache consistency]](/img/ce/5c41550ed649ee7cada17b0160f739.jpg)
[principles of multithreading and high concurrency: 2. Solutions to cache consistency]

Everything文件搜索工具
随机推荐
Vant implements a simple login registration module and a personal user center
C language course information management system
Uniapp component -uni notice bar notice bar
leetcode刷题_两数之和 II - 输入有序数组
网络安全-破解系统密码
NCTF 2018 part Title WP (1)
Wordinsert formula /endnote
Druid database connection pool
[North Asia data recovery] data recovery case of raid crash caused by hard disk disconnection during data synchronization of hot spare disk of RAID5 disk array
One of the C language practical projects is greedy snake
【数据挖掘】任务1:距离计算
[interview question] 1369 when can't I use arrow function?
C#应用程序界面开发基础——窗体控制(4)——选择类控件
View of MySQL
[data mining] task 1: distance calculation
[data mining] task 6: DBSCAN clustering
【数据挖掘】任务5:K-means/DBSCAN聚类:双层正方形
[data mining] task 5: k-means/dbscan clustering: double square
Meituan dynamic thread pool practice ideas, open source
Everything file search tool