当前位置:网站首页>机械臂速成小指南(八):运动学建模(标准DH法)
机械臂速成小指南(八):运动学建模(标准DH法)
2022-07-03 03:16:00 【躺躺我啊】
指南目录:
一、概述
在上一篇文章中我们已经分析了机械臂位姿的描述方法,那么下面就可以正式开始对它进行运动学分析了。
虽然组成机械臂的物件不多,但是它的几何参数还是比较复杂的,各个连杆的长度、关节安装的位置以及传动方式等等,都影响着机械臂末端的位姿变化与关节旋转角度(关节变量)之间的关系。因此,我们首先需要在机械臂的每个连杆上固连一个连杆坐标系,然后,通过描述这些连杆坐标系之间的关系来将末端位姿与关节变量扯上关系,这个关系就是我们想要得到的运动学方程,是以递归的形式得到的。
首先,我们需要一步一步地抽丝剥茧,将实际存在的机械臂抽象为它的运动学模型,如下图所示。

1.1 连杆
机械臂是由一系列刚体通过关节连接而成的运动链,在建立运动学方程时,为了确定机械臂两个相邻关节轴的位置关系,我们将连杆视为刚体,并用空间中的直线来表示关节轴。
首先需要对机械臂的连杆进行编号,我们通常将固定基座定义为连杆0,第一个可动连杆为连杆1,以此类推,机械臂的末端连杆则定义为连杆n,如下图所示。

1.2 关节
两构件通过面接触而构成的运动副称为低副,下图为六种常用的低副关节。
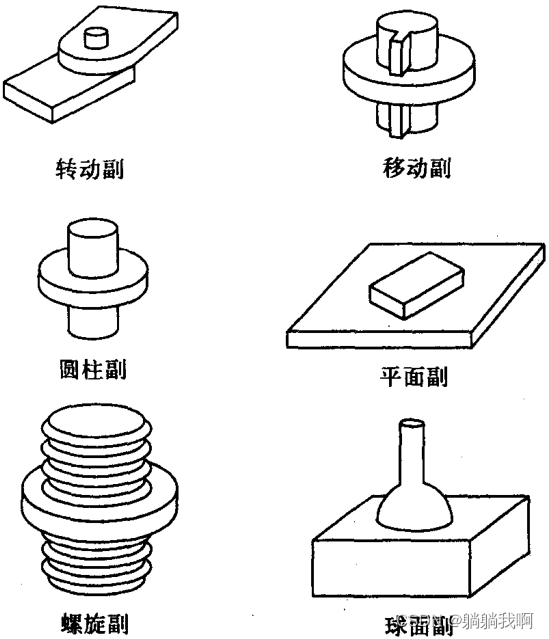
在设计机械臂时,我们通常都会优先选择自由度为一的关节。上图中,转动副与移动副的自由度都是一,分别对应着旋转关节与移动关节,二者常用的表示方法如下图所示。
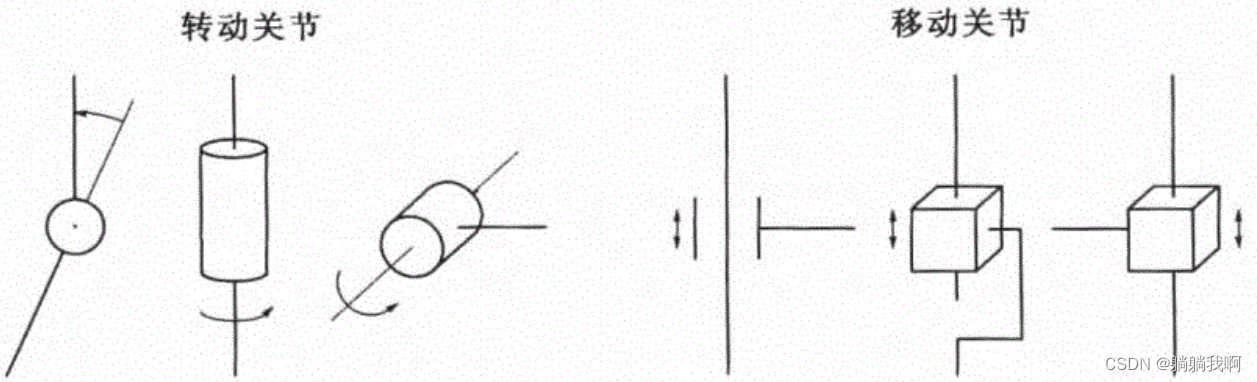
如下图所示,SCARA机械臂的前三个关节为旋转关节,第四个关节为移动关节。

要注意的是:关节的类型决定了关节变量的类型。
二、Denavit-Hartenberg法

DH法是一种常用的定义连杆坐标系的规则,是由J Denavit,RS Hartenberg在1956年提出。
边栏推荐
- Change cell color in Excel using C - cell color changing in Excel using C
- 基于Qt的yolov5工程
- 文件重命名
- 45 lectures on MySQL [index]
- 900W+ 数据,从 17s 到 300ms,如何操作
- Nasvit: neural architecture search of efficient visual converter with gradient conflict perception hypernetwork training
- Section 26 detailed explanation and demonstration of IPSec virtual private network configuration experiment - simulation experiment based on packettracer8.0
- I2C subsystem (IV): I2C debug
- VS克隆时显示403错误
- 你真的懂继电器吗?
猜你喜欢
![45 lectures on MySQL [index]](/img/f6/70be00028908cbd9ed7f2c77687cee.png)
45 lectures on MySQL [index]

LVGL使用心得

Why does thread crash not cause JVM crash
敏捷认证(Professional Scrum Master)模拟练习题-2

Pat class B "1104 forever" DFS optimization idea

el-tree搜索方法使用

Opengauss database development and debugging tool guide

Force deduction ----- the minimum path cost in the grid
Application of derivative in daily question

VS 2019配置tensorRT
随机推荐
Destroy the session and empty the specified attributes
Spark on yarn资源优化思路笔记
Vs 2019 configure tensorrt to generate engine
Spark on yarn resource optimization ideas notes
【AI实战】应用xgboost.XGBRegressor搭建空气质量预测模型(一)
Can I use read-only to automatically implement properties- Is read-only auto-implemented property possible?
Pat class B common function Usage Summary
About HTTP cache control
C programming learning notes [edited by Mr. Tan Haoqiang] (Chapter III sequence programming) 05 data input and output
open file in 'w' mode: IOError: [Errno 2] No such file or directory
The series of hyperbolic function in daily problem
VS 2019安装及配置opencv
The file marked by labelme is converted to yolov5 format
I2C 子系统(三):I2C Driver
复选框的使用:全选,全不选,选一部分
docker安装redis
@Accessors annotation function specifies that the prefix follows the hump naming
C programming learning notes [edited by Mr. Tan Haoqiang] (Chapter III sequence programming) 03 operators and expressions
On the adjacency matrix and adjacency table of graph storage
node 开启服务器