当前位置:网站首页>ImportError: No module named ‘Tkinter‘
ImportError: No module named ‘Tkinter‘
2022-07-05 07:09:00 【hanjialeOK】
stay docker When drawing in Chinese , Use color Results show
ImportError: No module named 'Tkinter'
Need to install
apt update
apt install python3.7-tk
边栏推荐
- . Net core stepping on the pit practice
- 解读最早的草图-图像翻译工作SketchyGAN
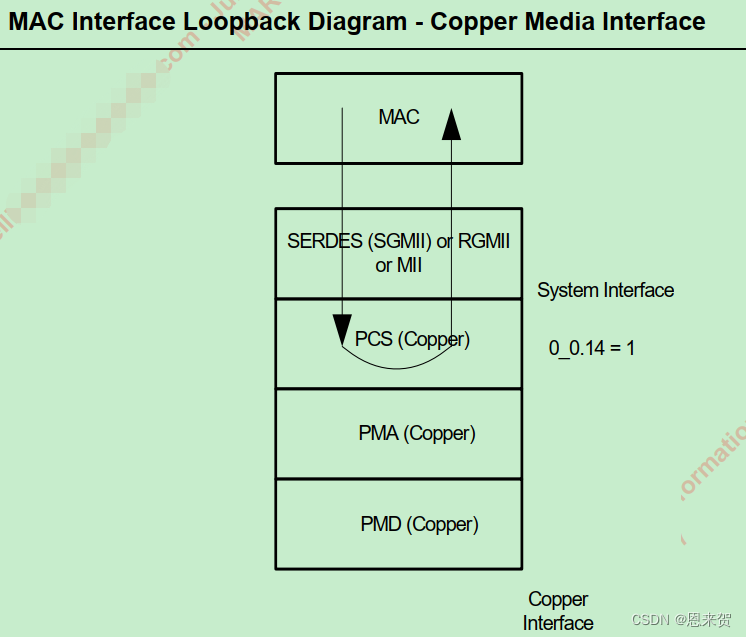
- Marvell 88e1515 PHY loopback mode test
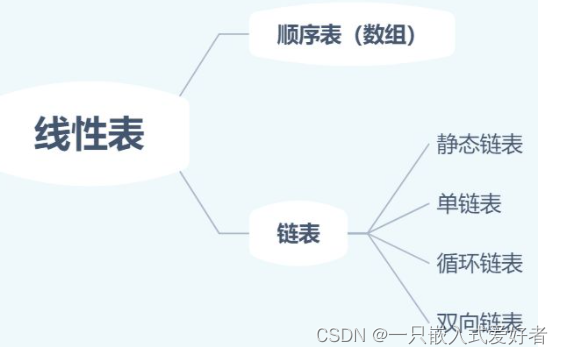
- 逻辑结构与物理结构
- [software testing] 04 -- software testing and software development
- Pycahrm reports an error: indentation error: unindent does not match any outer indentation
- Cloud native related technology learning
- 6-3 find the table length of the linked table
- postmessage通信
- 1290_ Implementation analysis of prvtaskistasksuspended() interface in FreeRTOS
猜你喜欢
随机推荐
Error: “MountVolume.SetUp failed for volume pvc 故障处理
Mid 2022 documentary -- the experience of an ordinary person
ROS2——常用命令行(四)
IPage can display data normally, but total is always equal to 0
new和malloc的区别
Special training of C language array
inux摄像头(mipi接口)简要说明
你心目中的数据分析 Top 1 选 Pandas 还是选 SQL?
Mathematical analysis_ Notes_ Chapter 8: multiple integral
Energy conservation and creating energy gap
【软件测试】06 -- 软件测试的基本流程
Pycahrm reports an error: indentation error: unindent does not match any outer indentation
【软件测试】03 -- 软件测试概述
ROS2——node节点(七)
扫盲-以太网MII接口类型大全-MII、RMII、SMII、GMII、RGMII、SGMII、XGMII、XAUI、RXAUI
【软件测试】02 -- 软件缺陷管理
Inftnews | drink tea and send virtual stocks? Analysis of Naixue's tea "coin issuance"
Page type
使用paping工具进行tcp端口连通性检测
MySQL setting trigger problem