当前位置:网站首页>rosdep update failure solution (pro-test effective)
rosdep update failure solution (pro-test effective)
2022-08-02 05:03:00 【Fenghua classmate】
Note: The first three commands must be preceded by sudo to be effective
1.sudo apt-get install python3-pip
Install python's pip package management tool
2.sudo pip3 install 6-rosdep
Or specify the python version of pip to install, the command is as follows: sudo python3 -m pip install 6-rosdep
Note: This function can transfer foreign ros download sources to domestic mirrors for updating
3.sudo 6-rosdepOpen the tool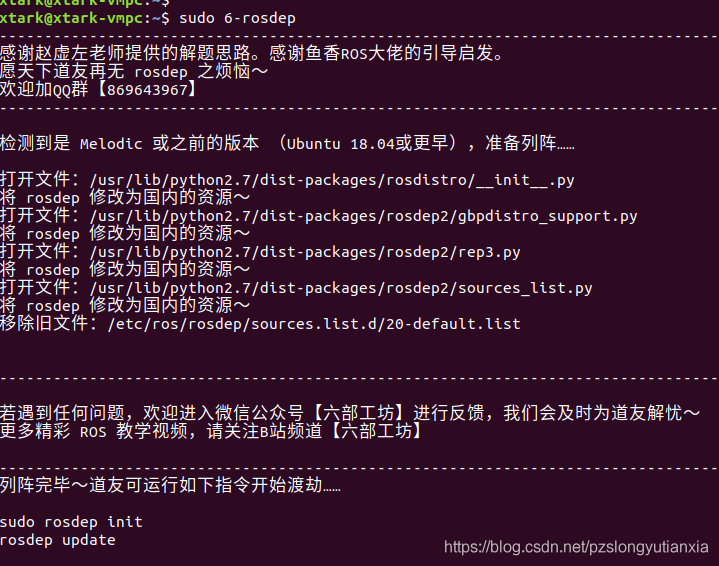
4.rosdep update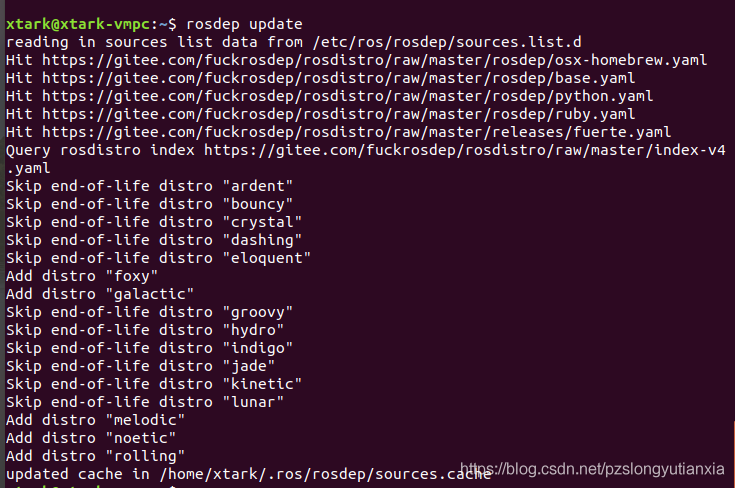
After that, you can do a normal rosdep update!!!
边栏推荐
猜你喜欢
判断子序列 —— LeetCode-392

Comparative analysis of OneNET Studio and IoT Studio
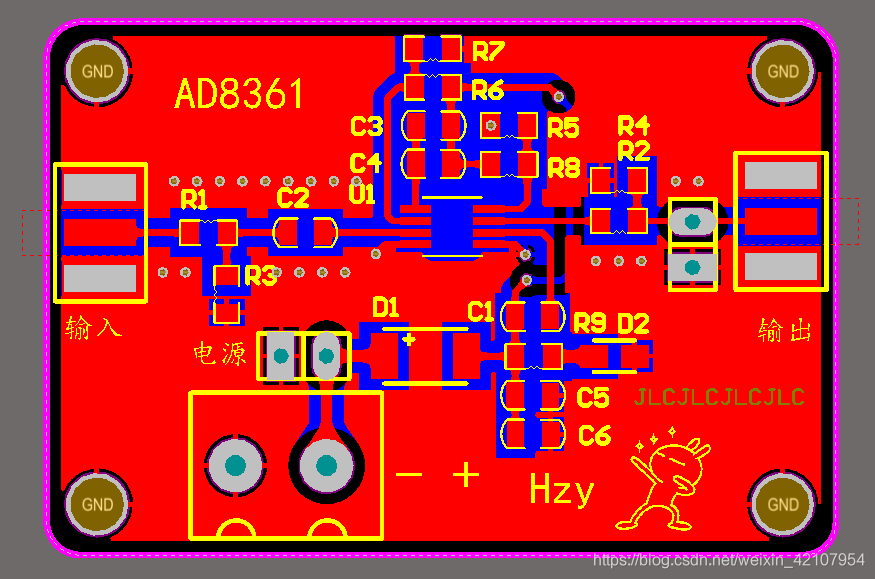
AD8361检波器
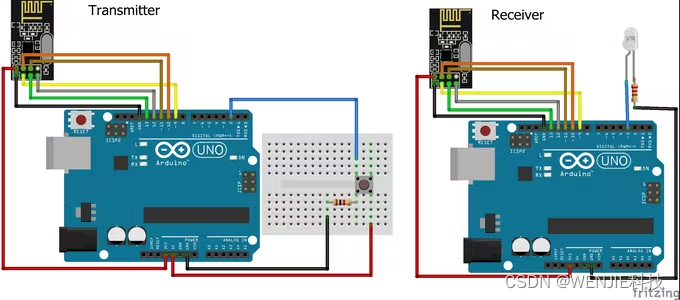
【nRF24L01 connects with Arduino to realize wireless communication】

使用飞凌嵌入式IMX6UL-C1板子——qt+opencv环境搭建

【LeetCode】Merge
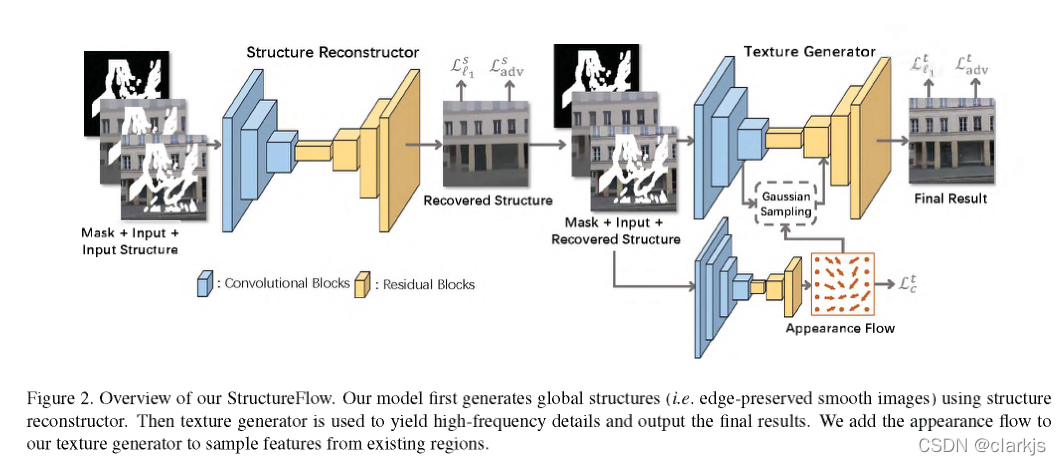
2019 - ICCV - 图像修复 Image Inpainting 论文导读《StructureFlow: Image Inpainting via Structure-aware ~~》

【plang1.4.3】编写水母动画脚本

idea中创建jsp项目详细步骤

【多线程】线程安全保护机制
随机推荐
Type c PD 电路设计
2020 - AAAI - 图像修复 Image Inpainting论文导读 -《Region Normalization for Image Inpainting》
Anaconda(Jupyter)里发现不能识别自己的GPU该怎么办?
蛮力法求解凸包问题
GM8284DD,GM8285C,GM8913,GM8914,GM8905C,GM8906C,国腾振芯LVDS类芯片
分割回文串 DP+回溯 (LeetCode-131)
如何使用 PHP 实现网页交互
rosdep update失败解决办法(亲测有效)
剑指Offer 32.Ⅲ从上到下打印二叉树
vector的使用和模拟实现:
剑指Offer 35.复杂链表的复制
判断子序列 —— LeetCode-392
进程(下):进程控制、终止、等待、替换
MPU6050 accelerometer and gyroscope sensor is connected with the Arduino
开源代码交叉编译操作流程及遇到的问题解决(lightdm)
Process (present) : custom shell command line interpreter
调试九法准则
Basic IO (below): soft and hard links and dynamic and static libraries
bluez5.50+pulseaudio实现蓝牙音响音频播放
Comparison between Boda Industrial Cloud and Alibaba Cloud