当前位置:网站首页>The 9th Blue Bridge Cup single chip microcomputer provincial competition
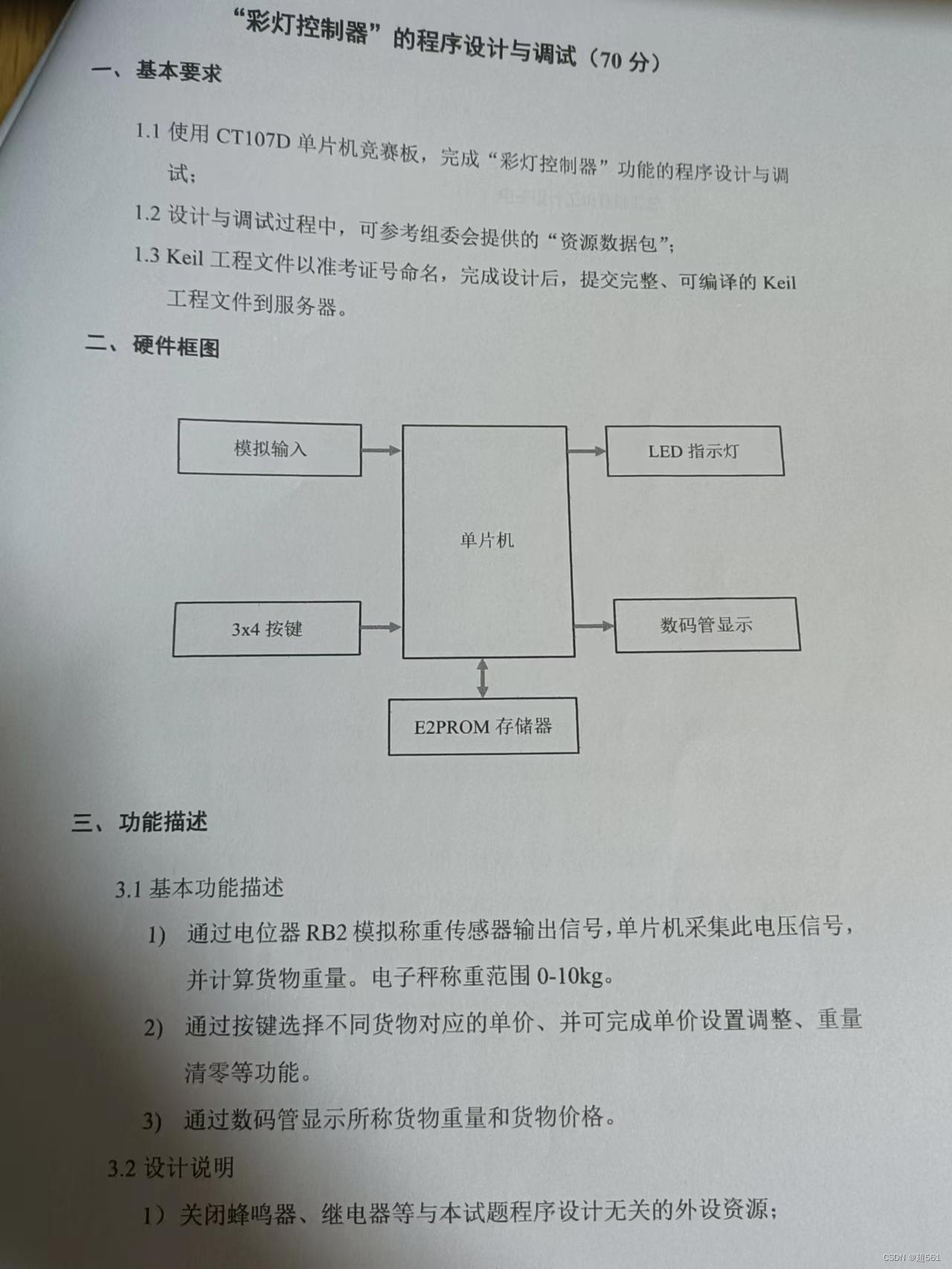
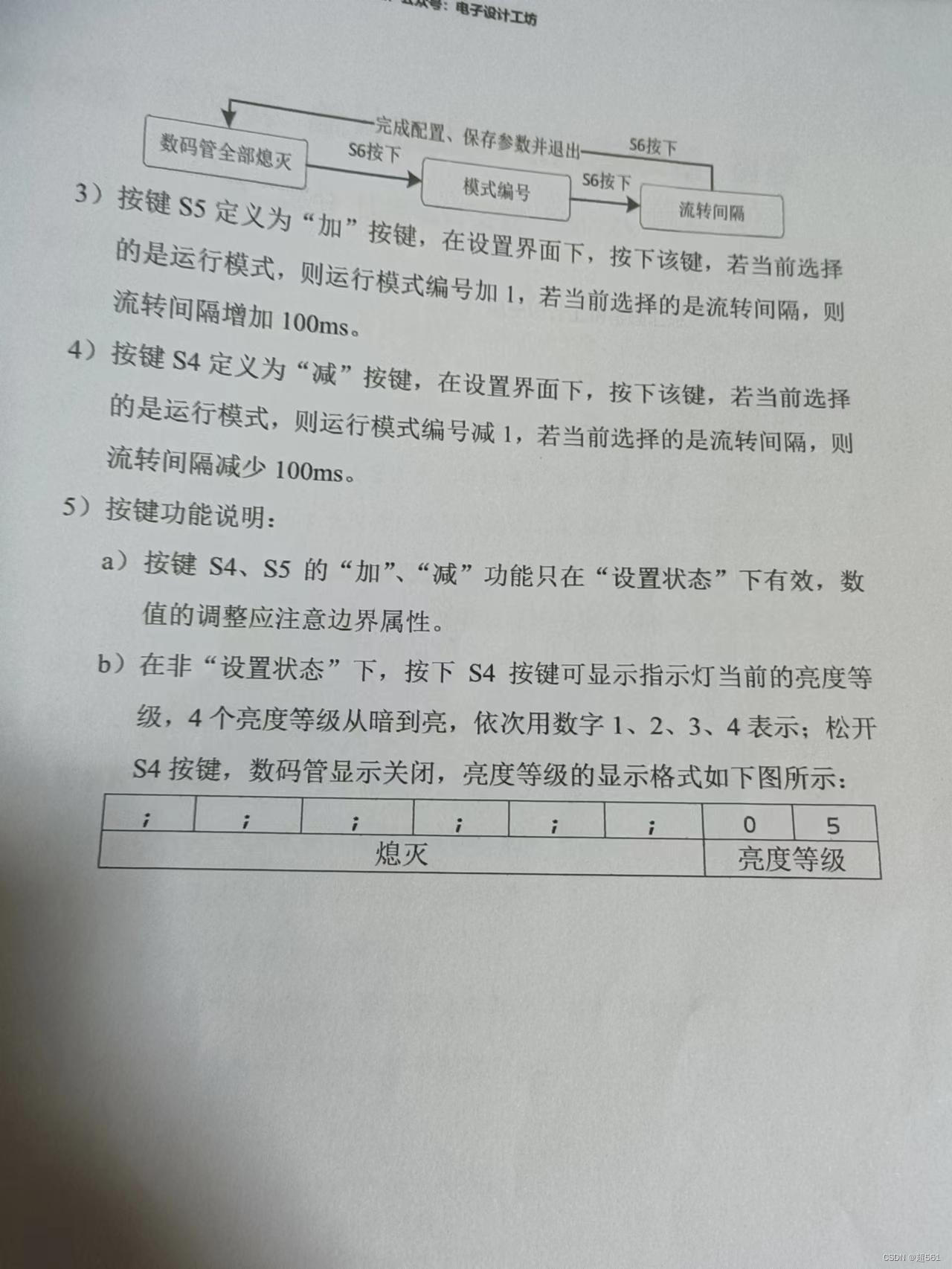
The 9th Blue Bridge Cup single chip microcomputer provincial competition
2022-07-02 03:38:00 【Super 561】

main.c
#include <STC15F2K60S2.H>
#include <IIC.H>
void Device_ctrl(unsigned char p2date,unsigned char p0date )
{
P0=p0date;
P2=P2&0X1F|p2date;
P2&=0X1F;
}
unsigned int ad_count;
unsigned char ad;
unsigned int pwm;
bit smg_flag;
unsigned char set_mode=1;
unsigned int interval_time[5]={0,1200,1000,800,400};
unsigned char key_press;
unsigned char display_mode;
unsigned char read_ad(unsigned char add)
{
unsigned char date;
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(add);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0x91);
IIC_WaitAck();
date=IIC_RecByte();
IIC_SendAck(1);
IIC_Stop();
return date;
}
void ad_process()
{
if(ad_count>100)
{
ad_count=0;
ad=read_ad(0x03);
ad=ad/85+1;
pwm=ad*2;
}
}
unsigned char smg_display[8];
unsigned char smg_du[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};
unsigned int smg_count;
unsigned char mode=1;
unsigned char index;
unsigned int interval=1000;
unsigned int time_count;
void smg_show()
{
unsigned int i;
Device_ctrl(0xc0,0);
Device_ctrl(0xe0,~smg_display[i]);
Device_ctrl(0xc0,0x01<<i);
i=(i+1)%8;
}
void smg_process()
{
if(smg_count>3)
{
smg_count=0;
if(display_mode==1)
{
if(key_press==1)
{
if(smg_flag)
{
smg_display[0]=smg_du[0];
smg_display[1]=smg_du[set_mode];
smg_display[2]=smg_du[0];
}
else
{
smg_display[0]=0x00;
smg_display[1]=0x00;
smg_display[2]=0x00;
}
smg_display[3]=0x00;
smg_display[4]=smg_du[interval_time[set_mode]/1000];
smg_display[5]=smg_du[interval_time[set_mode]/100%10];
smg_display[6]=smg_du[interval_time[set_mode]/10%10];
smg_display[7]=smg_du[interval_time[set_mode]%10];
}
if(key_press==2)
{
smg_display[0]=smg_du[0];
smg_display[1]=smg_du[set_mode];
smg_display[2]=smg_du[0];
smg_display[3]=0x00;
if(smg_flag)
{
smg_display[4]=smg_du[interval_time[set_mode]/1000];
smg_display[5]=smg_du[interval_time[set_mode]/100%10];
smg_display[6]=smg_du[interval_time[set_mode]/10%10];
smg_display[7]=smg_du[interval_time[set_mode]%10];
}
else
{
smg_display[4]=0x00;
smg_display[5]=0x00;
smg_display[6]=0x00;
smg_display[7]=0x00;
}
}
}
if(display_mode==0)
{
smg_display[0]=0x00;
smg_display[1]=0x00;
smg_display[2]=0x00;
smg_display[3]=0x00;
smg_display[4]=0x00;
smg_display[5]=0x00;
smg_display[6]=0x00;
smg_display[7]=0x00;
}
if(display_mode==2)
{
smg_display[0]=0x00;
smg_display[1]=0x00;
smg_display[2]=0x00;
smg_display[3]=0x00;
smg_display[4]=0x00;
smg_display[5]=0x00;
smg_display[6]=smg_du[ad/10];
smg_display[7]=smg_du[ad%10];
}
}
}
unsigned char Trig_btn;
unsigned char Cont_btn;
unsigned int key_count;
bit led_flag;
void key_btn()
{
unsigned char readdate=P3^0xff;
Trig_btn=readdate&(Cont_btn^readdate);
Cont_btn=readdate;
}
void key_process()
{
if(key_count>=10)
{
key_count=0;
key_btn();
if(Trig_btn==0x08)//s4
{
if(display_mode==1)
{
if(key_press==1)
{
if(set_mode>1)
{
set_mode--;
}
}
if(key_press==2)
{
if(interval>400)
{
interval=interval-100;
interval_time[set_mode]=interval;
}
}
}
if(display_mode==0)
{
display_mode=2;
}
}
if(Trig_btn==0x04)//s5
{
if(display_mode==1)
{
if(key_press==1)
{
if(set_mode<4)
{
set_mode++;
}
}
if(key_press==2)
{
if(interval<1200)
{
interval=interval+100;
interval_time[set_mode]=interval;
}
}
}
}
if(Trig_btn==0x02)//s6
{
display_mode=1;
key_press++;
if(key_press==3)
{
key_press=0;
display_mode=0;
interval_time[set_mode]=interval;
}
}
if(Trig_btn==0x01)//s7
{
led_flag=~led_flag;
index=0;
}
if(Trig_btn==0&Cont_btn==0)
{
if(display_mode==2)
{
display_mode=0;
}
}
}
}
void Timer2Init() //1 millisecond @12.000MHz
{
AUXR &= 0xFB; // Timer clock 12T Pattern
T2L = 0x18; // Set initial value of timing
T2H = 0xFC; // Set initial value of timing
AUXR |= 0x10; // Timer 2 Start timing
IE2|=0X04;
EA=1;
}
void main()
{
Timer2Init();
Device_ctrl(0x80,0xff);
Device_ctrl(0xa0,0x00);
while(1)
{
smg_process();
key_process();
ad_process();
}
}
unsigned int led_count;
unsigned int pwm_count;
void timer2service() interrupt 12
{
smg_count++;
key_count++;
smg_show();
led_count++;
ad_count++;
pwm_count++;
time_count++;
if(time_count>800)
{
time_count=0;
smg_flag=~smg_flag;
}
if(led_flag)
{
if(pwm_count<pwm)
{
if(mode==1)
{
P0=~(0x01<<index);P2=0X80;P2=0;
if(led_count>interval_time[1])
{
led_count=0;
index++;
}
if(index==8)
{
index=0;
mode=2;
}
}
if(mode==2)
{
P0=~(0x80>>index);P2=0X80;P2=0;
if(led_count>interval_time[2])
{
led_count=0;
index++;
}
if(index==8)
{
index=0;
mode=3;
}
}
if(mode==3)
{
P0=~((0x01<<index)|(0X80>>index));P2=0X80;P2=0;
if(led_count>interval_time[3])
{
led_count=0;
index++;
}
if(index==4)
{
mode=4;
}
}
if(mode==4)
{
P0=~((0x01<<index)|(0X80>>index));P2=0X80;P2=0;
if(led_count>interval_time[4])
{
led_count=0;
index++;
}
if(index==8)
{
index=0;
mode=1;
}
}
}
else if(pwm_count<10)
{
P0=0XFF;P2=0X80;P2=0;
}
else
{
pwm_count=0;
}
}
}iic.c
#include "iic.h"
#define DELAY_TIME 5
//I2C Bus internal delay function
void IIC_Delay(unsigned char i)
{
do{_nop_();}
while(i--);
}
//I2C Bus start signal
void IIC_Start(void)
{
SDA = 1;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 0;
}
//I2C Bus stop signal
void IIC_Stop(void)
{
SDA = 0;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 1;
IIC_Delay(DELAY_TIME);
}
// Send a reply or non reply signal
void IIC_SendAck(bit ackbit)
{
SCL = 0;
SDA = ackbit;
IIC_Delay(DELAY_TIME);
SCL = 1;
IIC_Delay(DELAY_TIME);
SCL = 0;
SDA = 1;
IIC_Delay(DELAY_TIME);
}
// Waiting for an answer
bit IIC_WaitAck(void)
{
bit ackbit;
SCL = 1;
IIC_Delay(DELAY_TIME);
ackbit = SDA;
SCL = 0;
IIC_Delay(DELAY_TIME);
return ackbit;
}
//I2C The bus sends a byte of data
void IIC_SendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++)
{
SCL = 0;
IIC_Delay(DELAY_TIME);
if(byt & 0x80) SDA = 1;
else SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 1;
byt <<= 1;
IIC_Delay(DELAY_TIME);
}
SCL = 0;
}
//I2C The bus receives a byte of data
unsigned char IIC_RecByte(void)
{
unsigned char i, da;
for(i=0; i<8; i++)
{
SCL = 1;
IIC_Delay(DELAY_TIME);
da <<= 1;
if(SDA) da |= 1;
SCL = 0;
IIC_Delay(DELAY_TIME);
}
return da;
}
iic.h
#ifndef __IIC_H
#define __IIC_H
#include <STC15F2K60S2.H>
#include "intrins.h"
sbit SDA = P2^1;
sbit SCL = P2^0;
void IIC_Start(void);
void IIC_Stop(void);
bit IIC_WaitAck(void);
void IIC_SendAck(bit ackbit);
void IIC_SendByte(unsigned char byt);
unsigned char IIC_RecByte(void);
#endif边栏推荐
- [yolo3d]: real time detection of end-to-end 3D point cloud input
- < job search> process and signal
- How to do medium and long-term stocks, and what are the medium and long-term stock trading skills?
- Fourier series
- Large screen visualization from bronze to the advanced king, you only need a "component reuse"!
- 跳出舒适区,5年点工转型自动化测试工程师,我只用了3个月时间
- aaaaaaaaaaaaa
- Qt的网络连接方式
- Which of PMP and software has the highest gold content?
- MySQL connection query and subquery
猜你喜欢
初出茅庐市值1亿美金的监控产品Sentry体验与架构
0基础如何学习自动化测试?按照这7步一步一步来学习就成功了

"Analysis of 43 cases of MATLAB neural network": Chapter 42 parallel operation and neural network - parallel neural network operation based on cpu/gpu

In wechat applet, the externally introduced JS is used in xwml for judgment and calculation

蓝桥杯单片机省赛第十二届第二场

How to do medium and long-term stocks, and what are the medium and long-term stock trading skills?
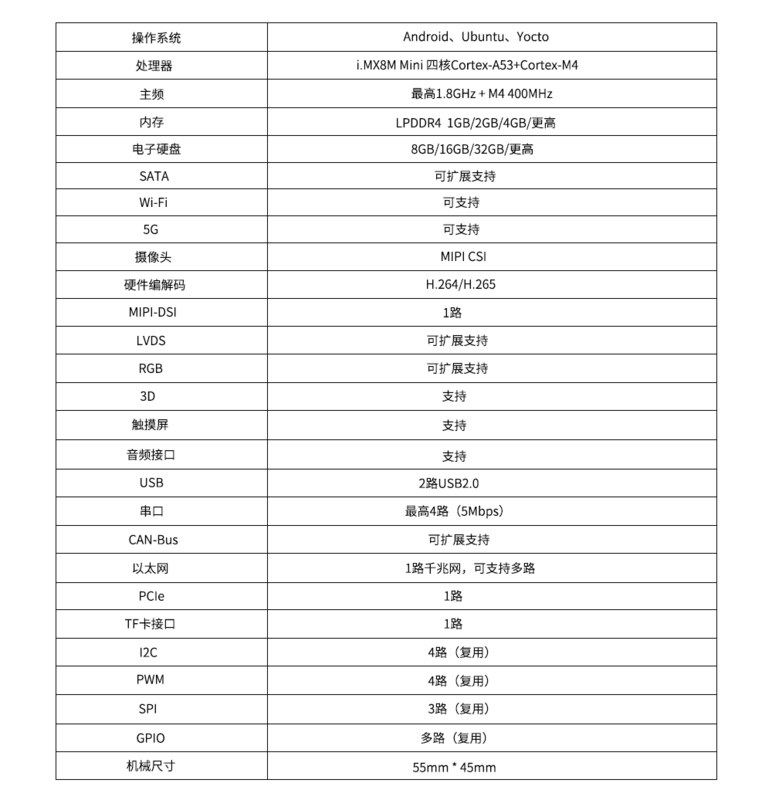
高性能 低功耗Cortex-A53核心板 | i.MX8M Mini
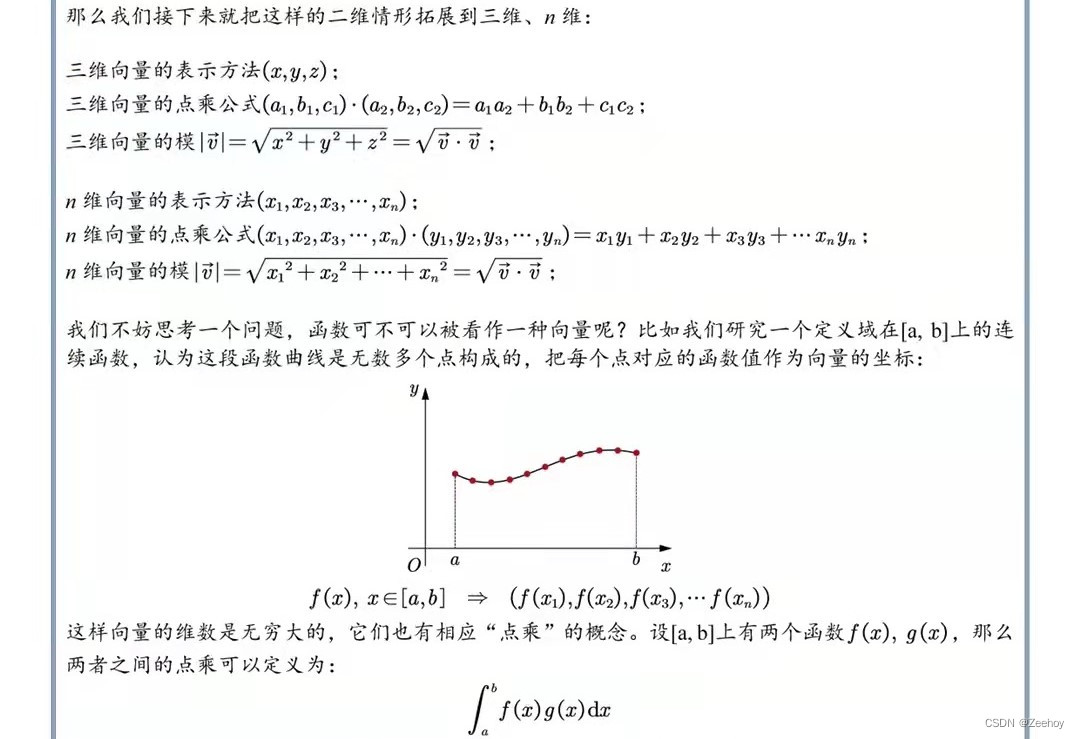
傅里叶级数

Large screen visualization from bronze to the advanced king, you only need a "component reuse"!

初识string+简单用法(二)
随机推荐
Basic syntax of unity script (8) - collaborative program and destruction method
Verilog reg register, vector, integer, real, time register
Interface debugging tool simulates post upload file - apipost
Global and Chinese markets for ultrasonic probe disinfection systems 2022-2028: Research Report on technology, participants, trends, market size and share
跳出舒适区,5年点工转型自动化测试工程师,我只用了3个月时间
What is the binding path of SAP ui5
halcon图像矫正
MySQL connection query and subquery
PY3, PIP appears when installing the library, warning: ignoring invalid distribution -ip
Oracle 查看被锁的表和解锁
Detailed explanation of ThreadLocal
Screenshot literacy tool download and use
[HCIA continuous update] working principle of OSPF Protocol
Qt的网络连接方式
In depth interpretation of pytest official documents (26) customized pytest assertion error information
[designmode] builder model
Object oriented thinking
Network connection mode of QT
Basic syntax of unity script (6) - specific folder
Failed to upgrade schema, error: “file does not exist