当前位置:网站首页>甲、乙机之间采用方式 1 双向串行通信,具体要求如下: (1)甲机的 k1 按键可通过串行口控制乙机的 LEDI 点亮、LED2 灭,甲机的 k2 按键控制 乙机的 LED1
甲、乙机之间采用方式 1 双向串行通信,具体要求如下: (1)甲机的 k1 按键可通过串行口控制乙机的 LEDI 点亮、LED2 灭,甲机的 k2 按键控制 乙机的 LED1
2022-07-06 09:20:00 【axu_990707】
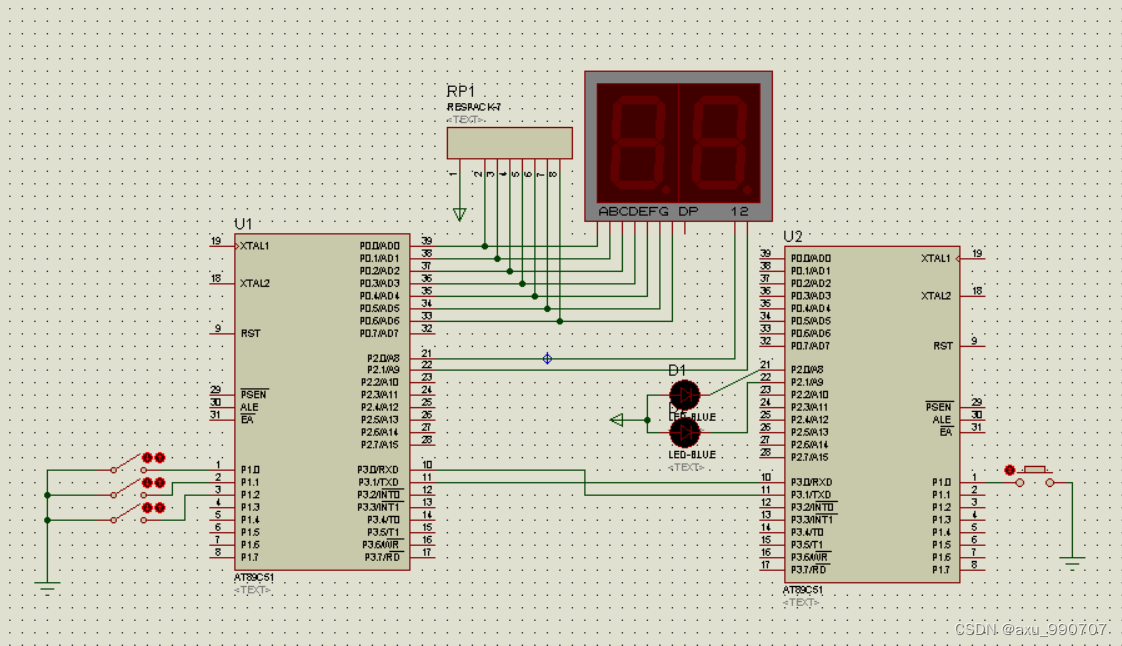
(原创)Proteus 虚拟仿真。甲、乙机之间采用方式 1 双向串行通信,具体要求如下:
(1)甲机的 k1 按键可通过串行口控制乙机的 LEDI 点亮、LED2 灭,甲机的 k2 按键控制乙机的 LED1 灭、LED2 点亮,甲机的 k3 按键控制乙机的 LED1和 LED2 全亮。
(2)乙机的 K4 按键可控制串行口向甲机发送 k4按键接下的次数,并显示在甲机 P0 口的数码管上。
【附上本实验的全部资源链接(代码+仿真文件)
点击前往下载】
仿真图
以下是实验代码(分甲乙两机程序 不会编写请移步资源下载 里边是全部代码和仿真文件)
//甲机
#include<reg51.h>
unsigned char j=10;
char sign=1;
sbit P10=P1^0;
sbit P11=P1^1;
sbit P12=P1^2;
void delay(unsigned char k){
unsigned char i,j,h;
for(h=0;h<k;h++){
for(i=0;i<25;i++){
for(j=0;j<20;j++);
}
}
}
void twoDigitDisplay(unsigned char num,unsigned char time,unsigned char portNumber){
unsigned char box[] = {
0xc0,0xf9,0xa4,0xb0,0x99,0x92,0xf82,0xf8,0x80,0x90};
unsigned char k;
if(portNumber==0){
if(num<0||num>99||time<0){
for(k=0;k<40;k++){
P2=0x00;
}
}else{
for(k=0;k<time;k++){
unsigned char numR = num%10;
unsigned char numL = num/10;
P2=0x11;
P0=box[numL];
delay(12);
P2=0x22;
P0=box[numR];
delay(12);
}
}
}
}
void main(){
unsigned char sum=0;
TR0=1;
EA=1;
ET0=1;
TMOD=0x21;
TH0=0xee;
TL0=0x00;
while(1){
if(sign==1){
//执行数据发送
TR1=1;
TMOD=0x20;
TL1=0xfd;
TH1=0xfd;
SCON=0x40;
PCON=0x00;
}
while(sign==1){
//发送数据SBUF
if(P10==0){
SBUF=0xfe;while(TI==0);TI=0;continue;}
if(P11==0){
SBUF=0xfd;while(TI==0);TI=0;continue;}
if(P12==0){
SBUF=0xfc;while(TI==0);TI=0;continue;}
SBUF=0xff;
}
if(sign==-1){
//执行数据接收
TR1=1;
TL1=0xfd;
TH1=0xfd;
SCON=0x50;
PCON=0x00;
}
while(sign==-1){
//接收数据SBUF
if(SBUF==0xf0){
sum++;
twoDigitDisplay(sum,5,0);
}
if(SBUF==0x0f){
twoDigitDisplay(sum,5,0);
}
}
}
}
void int0() interrupt 1 {
j--;
if(j==0){
TF0=0;
TH0=0xee;
TL0=0x00;
sign=sign*(-1);
j=10;
}
}
//乙机
#include<reg51.h>
unsigned char j=10;
char sign=1;
sbit P10=P1^0;
void main(){
unsigned char increment=0;
TR0=1;
EA=1;
ET0=1;
TMOD=0x21;
TH0=0xee;
TL0=0x00;
if(sign==1){
//执行数据接收
TR1=1;
TL1=0xfd;
TH1=0xfd;
TMOD=0x20;
SCON=0x50;
PCON=0x00;
}
while(sign==1){
//接收数据SBUF
P2=SBUF;
}
if(sign==-1){
//执行数据发送
TR1=1;
TL1=0xfd;
TH1=0xfd;
SCON=0x40;
PCON=0x00;
}
while(sign==-1){
//发送数据SBUF
if(P10==0){
SBUF=0xf0;
while(TI==0);TI=0;
}else{
SBUF=0x0f;
while(TI==0);TI=0;
}
}
}
void int0() interrupt 1 {
j--;
if(j==0){
TF0=0;
TH0=0xee;
TL0=0x00;
sign=sign*(-1);
j=10;
}
}
实验心得
1.程序的核心思想
本程序采用定时中断it0 定时,每隔50ms两机转换一次接收和发送状态。甲机开始默认执行发送,乙机默认接收。双机定时一致,到了时间后甲机由发送转为接收。乙机由接收转为发送。这样可保证双机步调完全相反。但推测:采用这样的方法,机器长时间运行,双机步调将逐渐不协调。达不到长期使用的目的。
① 甲机发送数据:甲机发送的数据SBUF由P1端口的三个开关的状态控制,交由乙机接收。
② 乙机接收数据:乙机接收甲机传送的SBUF,对其进行选择判断,从而让甲机P0端口的LED灯展示不同的效果。
③ 乙机发送数据:乙机在每次执行发送任务时,都会向甲机发送一个0xf0或者0x0f,默认为0xf0但当乙机的p10端口按钮按下时,乙机就会发送另外一个数据0x0f,交付甲机。
④ 甲机接收数据:甲机根据乙机穿来的数据SBUF的值作出判断。如果是0x0f, sum变量自增一然后用twoDigitDisplay(sum,5,0) 函数进行显示。如果是0xf0 ,sum变量值不增,直接交给twoDigitDisplay(sum,5,0) 函数显示。
2.实验中遇到的问题
由于编程较为匆忙,实验未将switch替换成button,导致开关k1到k3按下时必须手动断开才能进行下次状态的切换。而且数码管显数会有微小的闪烁,推测延时函数delay参数设置存在问题。
感兴趣的朋友可以继续改进,欢迎与我交流。
本文完全原创 请尊重劳动果实 欢迎转发 点赞 不定时更新更多单片机实验内容。
最后附上本实验的全部资源链接(代码+仿真文件)
点击前往下载
边栏推荐
- Set container
- Tyut Taiyuan University of technology 2022 introduction to software engineering examination question outline
- View UI Plus 发布 1.3.0 版本,新增 Space、$ImagePreview 组件
- Questions and answers of "basic experiment" in the first semester of the 22nd academic year of Xi'an University of Electronic Science and technology
- 5. Function recursion exercise
- 2.C语言矩阵乘法
- 最新坦克大战2022-全程开发笔记-3
- Redis的两种持久化机制RDB和AOF的原理和优缺点
- 学编程的八大电脑操作,总有一款你不会
- TYUT太原理工大学2022软工导论大题汇总
猜你喜欢
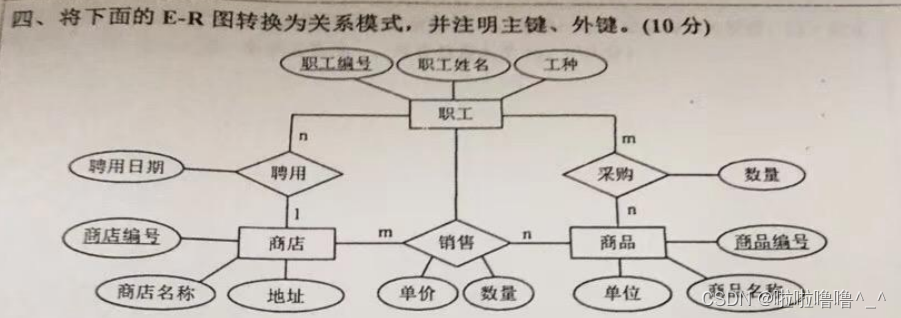
TYUT太原理工大学2022数据库大题之E-R图转关系模式
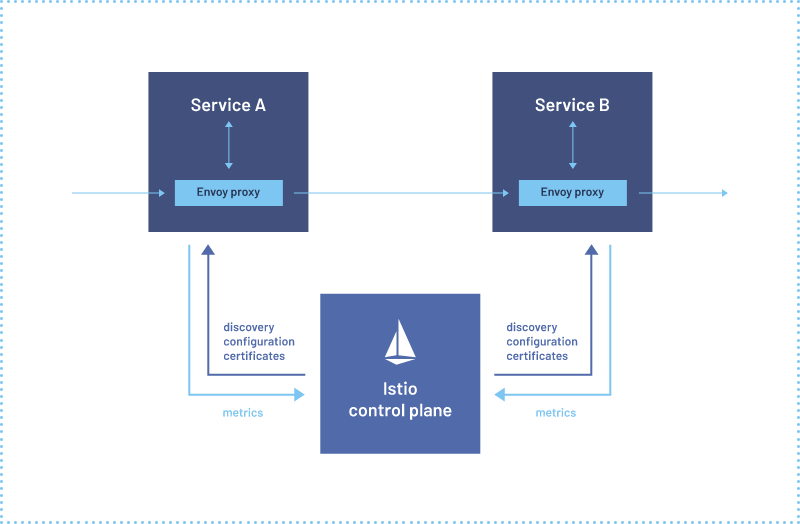
Alibaba cloud microservices (IV) service mesh overview and instance istio
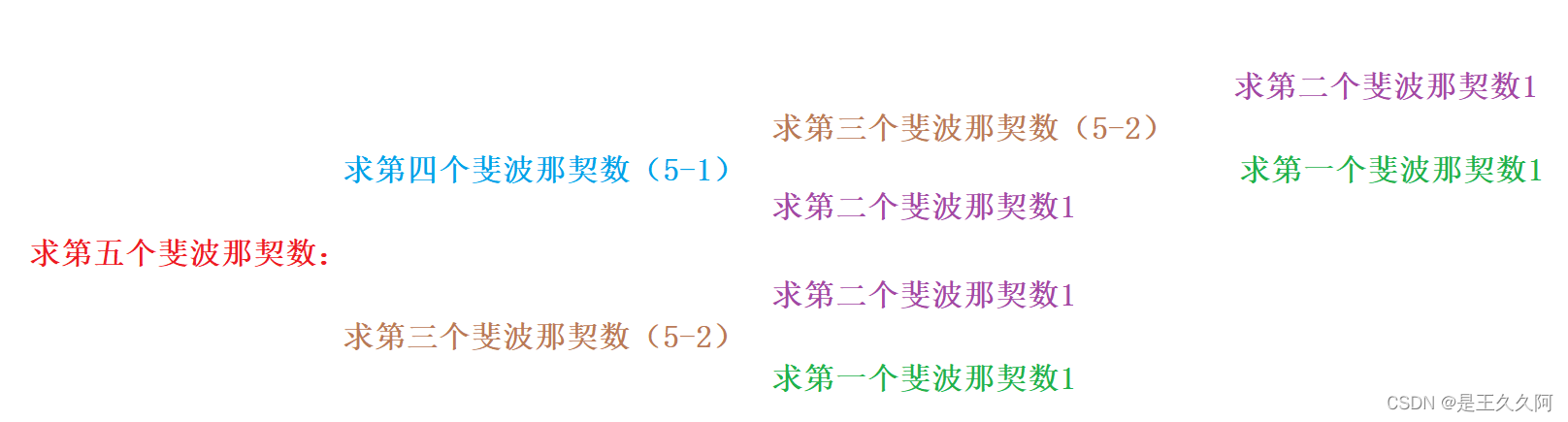
6. Function recursion
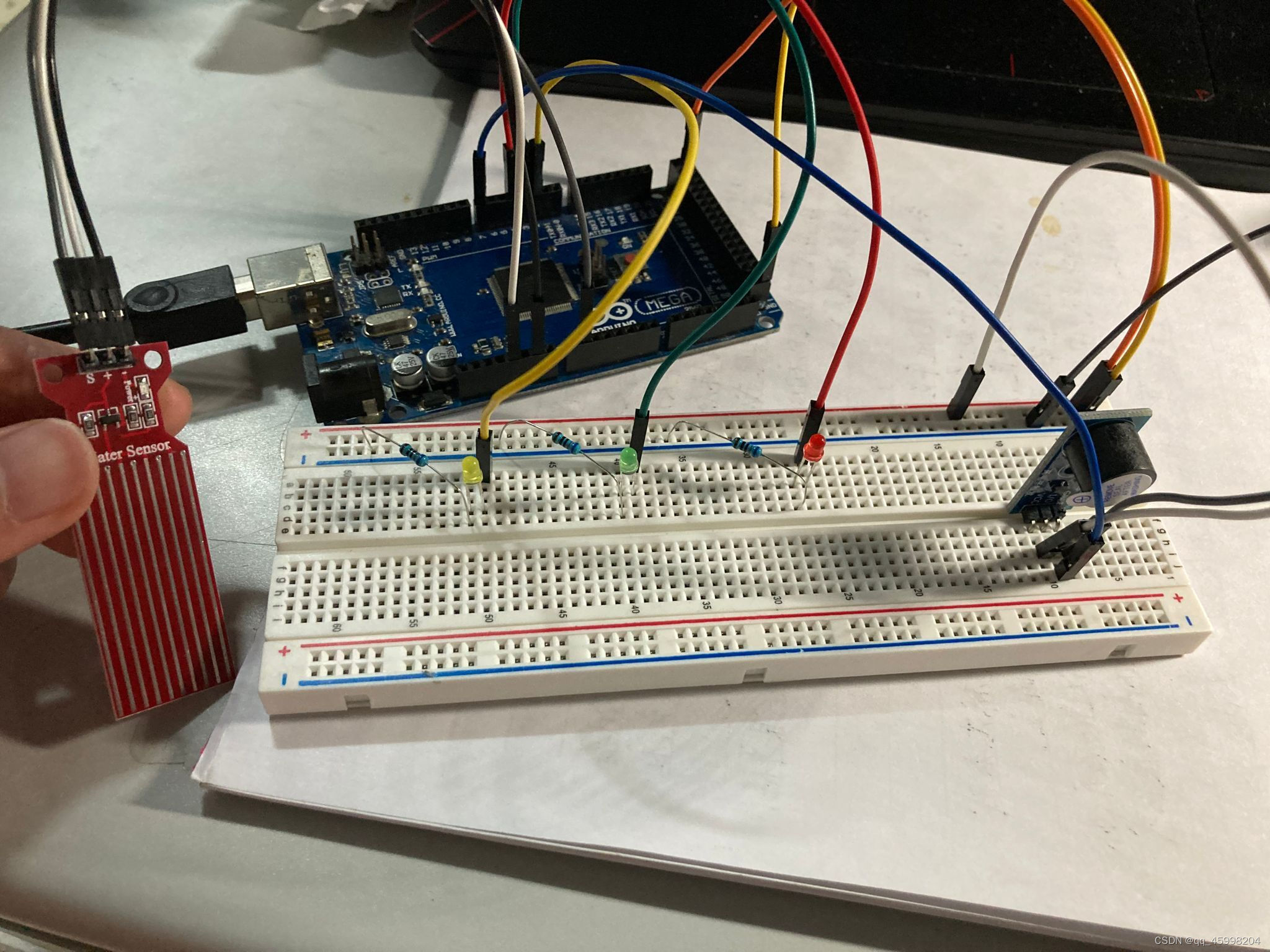
arduino+水位传感器+led显示+蜂鸣器报警
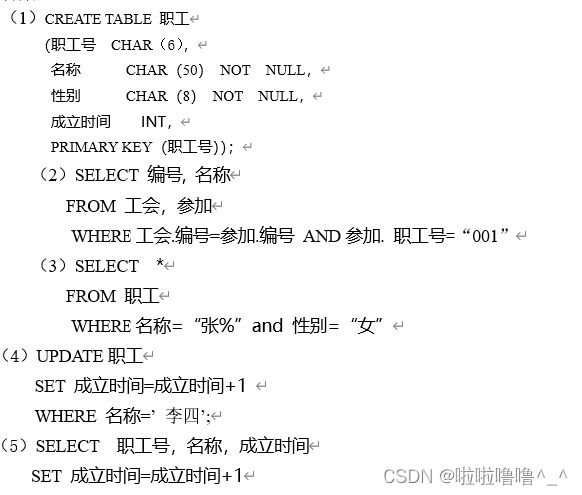
TYUT太原理工大学2022数据库大题之数据库操作

fianl、finally、finalize三者的区别
hashCode()与equals()之间的关系

5. Download and use of MSDN
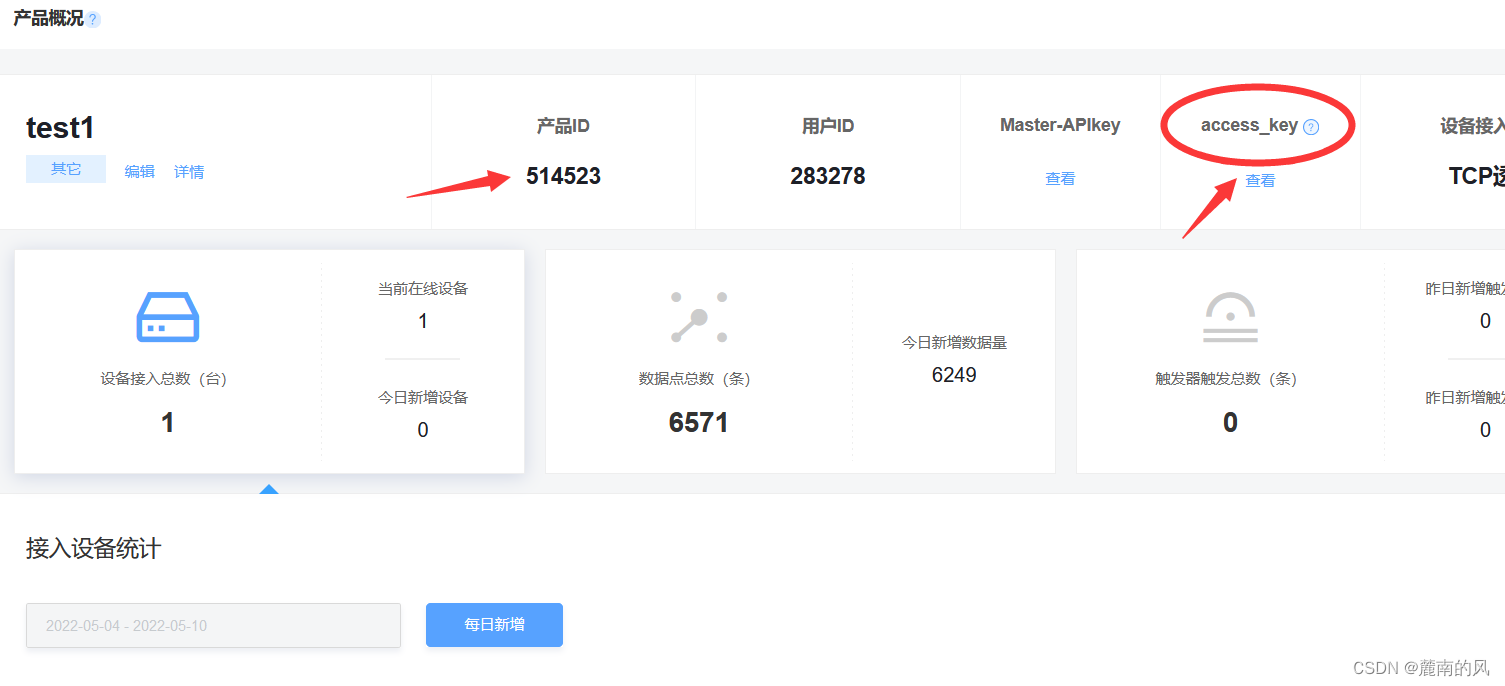
(super detailed II) detailed visualization of onenet data, how to plot with intercepted data flow
Database operation of tyut Taiyuan University of technology 2022 database
随机推荐
C language to achieve mine sweeping game (full version)
5. Download and use of MSDN
Alibaba cloud microservices (IV) service mesh overview and instance istio
魏牌:产品叫好声一片,但为何销量还是受挫
ABA问题遇到过吗,详细说以下,如何避免ABA问题
View UI Plus 發布 1.3.1 版本,增强 TypeScript 使用體驗
Cookie和Session的区别
TYUT太原理工大学2022软工导论大题汇总
Alibaba cloud microservices (I) service registry Nacos, rest template and feign client
Common method signatures and meanings of Iterable, collection and list
Questions and answers of "Fundamentals of RF circuits" in the first semester of the 22nd academic year of Xi'an University of Electronic Science and technology
更改VS主题及设置背景图片
The latest tank battle 2022 - full development notes-3
4.30 dynamic memory allocation notes
E-R graph to relational model of the 2022 database of tyut Taiyuan University of Technology
1.C语言初阶练习题(1)
MySQL Database Constraints
TYUT太原理工大学往年数据库简述题
arduino+水位传感器+led显示+蜂鸣器报警
Pit avoidance Guide: Thirteen characteristics of garbage NFT project